




 本文介绍了如何利用PanoSim5仿真平台按照ISO16787-2017标准构建和仿真自动泊车系统(APS)的静态和动态场景。在静态场景中详细描述了垂直泊车位的设定,而在动态场景中,展示了PanoSim5的高逼真虚拟3D环境、传感器模型和交通模型的运用,以及自动化测试和评价的过程。
本文介绍了如何利用PanoSim5仿真平台按照ISO16787-2017标准构建和仿真自动泊车系统(APS)的静态和动态场景。在静态场景中详细描述了垂直泊车位的设定,而在动态场景中,展示了PanoSim5的高逼真虚拟3D环境、传感器模型和交通模型的运用,以及自动化测试和评价的过程。
ISO16787-2017简介
ISO 16787:2017涵盖了轻型车辆的辅助停车系统 (APS),例如配备此类 APS 的乘用车、皮卡车、轻型货车和运动型多功能车。本标准规定了驾驶员对系统的功能要求,例如检测合适的停车位、计算轨迹和车辆的横向控制。APS 旨在为驾驶员提供自动泊车辅助功能。APS 在车辆附近的环境中搜索其他停放车辆之间的合适停车区域或道路上的标记,在停车操作期间评估所需信息,以计算停车轨迹并将转向命令发送到转向系统。
一、静态场景
静态场景由预设路径和参数梯度组成,这里仅以垂直泊车位姿为例,说明场景搭建方法:
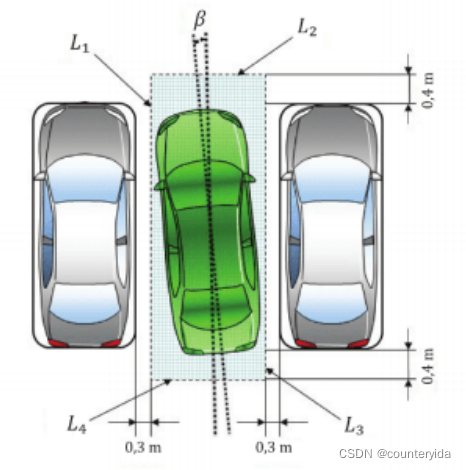
辅助停车系统操纵结束时APS车辆达到的终点位置要求由上述区域描述。目标区域由四条线限制。L1与左边界车辆的右侧平行,距离为0.3m,L3与右边界车辆的左侧平行,距离为0.3m,L2和L4与相邻车辆的前/后边缘平行,距离为0.4m。由于系统不控制APS车辆的纵向移动,当系统指示辅助停车模式完成且到达目标区域时,驾驶员应停车。在末端位置,投射在地面上的车辆轮廓(不考虑侧视镜)应完全在目标区域内。
二、动态场景搭建与仿真
PanoSim5.0是在2021年更新的新一代PanoSim仿真平台,提供了多种仿真模型和工具的集成仿真,在高逼真虚拟3D环境,高精度传感器模型,高精度车辆动力学模型,交通模型和控制系统等多方面做出更新,旨在通过高逼真虚拟场景和精确的模型来减少虚拟仿真和真实世界之间的差距。
这里以搭建一个测试case为例,描述基于PanoSim的测试场景搭建方法:
(1)打开PanoSim软件
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 168万+
168万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









