




 在安装Catboost时遇到Packages Not Found Error,通过anaconda搜索和安装库,更新conda,解决numpy与catboost的版本兼容问题,最终成功安装并测试通过。
在安装Catboost时遇到Packages Not Found Error,通过anaconda搜索和安装库,更新conda,解决numpy与catboost的版本兼容问题,最终成功安装并测试通过。
最近决定长更,因为每天都会遇到代码实现等问题,查手册搜答案一时爽,转头就忘了,然后就重新查手册搜答案,就像希绪弗斯推石头。为了有所改变,就得想方法加深印象,每一个问题的解决步骤我都记录下来,有时间看一遍,以后就不用了老去搜重复的答案了。
这次遇到的问题是安装Catboost出现问题,出现Packages Not Found Error,如下图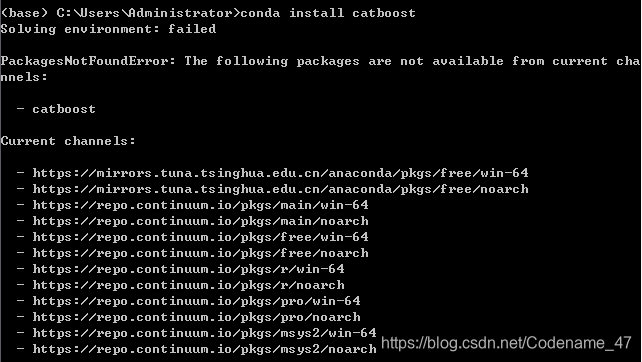
1. 解决步骤1
输入anaconda search -t conda libname #库名
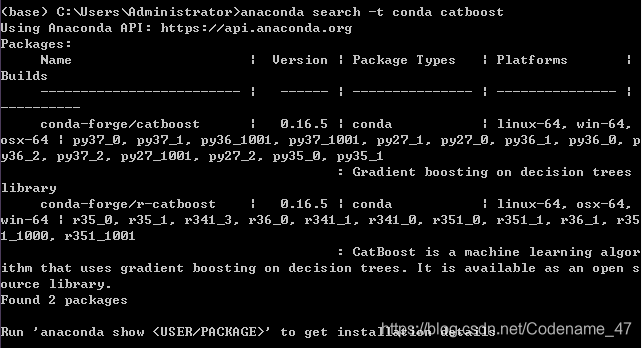
如图获得了两个包,且会对该库进行简介
2. 解决步骤2
输入anaconda show conda-forge/libname
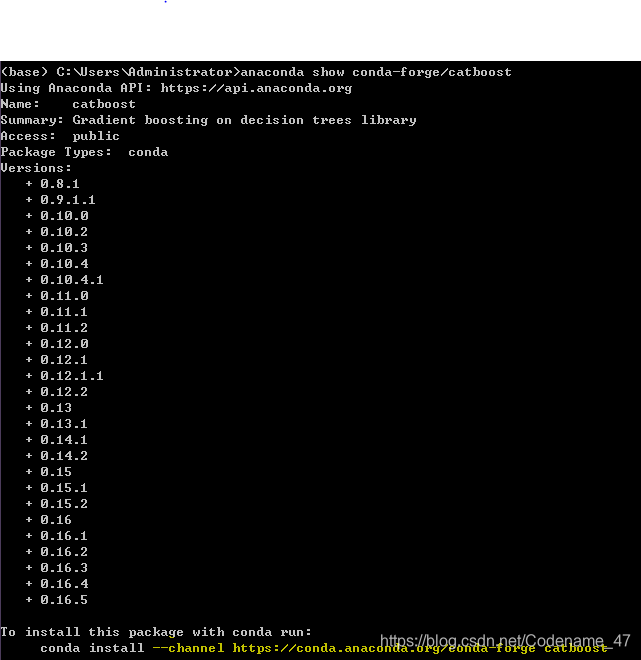
如图会显示这个包的详细版本
3. 解决步骤3
输入上图黄色部分,conda install --channel https://conda.org/conda-forge libname
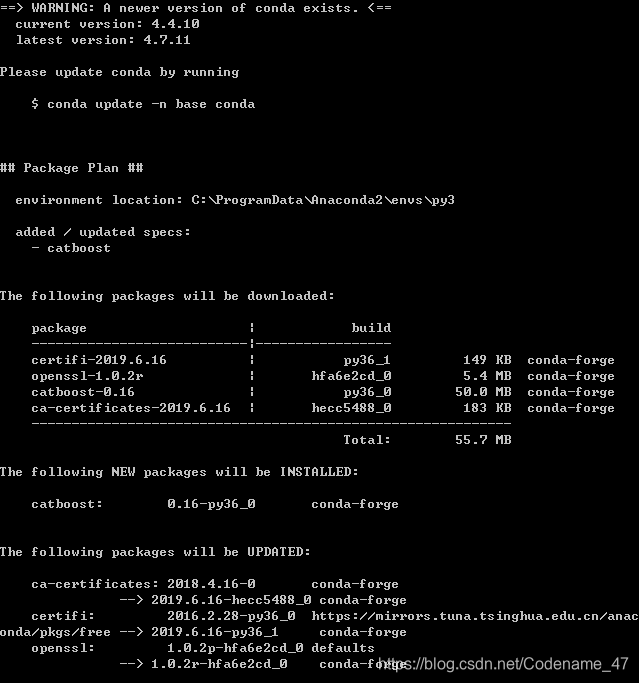
如图,显示conda需要更新,可能是我的软件老了,共4个包,那就选择更新,catboost有50MB
4. 解决步骤4
安装完成如下图

5. 测试
输入python >>import catboost测试是否安装成功
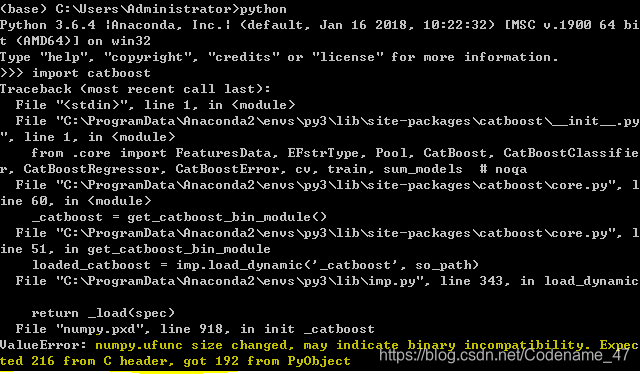
如图出现了值的错误,应该是numpy的版本与catboost不兼容,现在有可能是numpy版本过高,也有可能是版本过低,我决定卸载重装numpy。卸载重装的numpy一般是最新版本,如果测试仍然有问题,说明是numpy版本高,我就指定版本安装。
6. 新的征程1
输入下面三句话:
pip uninstall numpy

突然出现了一堆红字,这里只截最后一段

是权限错误,突然想起来jupyter是开着的,所以,关了再来一遍。
输入这句话安装船新的版本:pip install numpy==1.14.5
这时出现了readtimeout error,可以设置时间,不过也有可能是下载地址的网络不够稳定,我用上面的方法试一下,也许下载就快了。
7. 新的征程2
真的很麻烦呀,安装了numpy 1.14.6仍然会有值得错误,决定采用版本回滚的方法,现在不知道catboost要求怎样的numpy版本,不过我可以把两个都卸载掉,重装catboost,他应该会给我适配一个numpy包。
8. 新的征程3
然而,先安装numpy这种方法不可行,最后采用命令conda install numpy安装成功最新版1.17.0numpy,再conda install catboost,此次成功,根据安装显示,catboost版本0.16.5需要numpy1.16.0以上版本,另外会安装下图中的三个包:

9. 测试2
输入python >>import catboost,不再出现值错误。
All done,这次与环境的斗争就到这里。


















 5万+
5万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









