




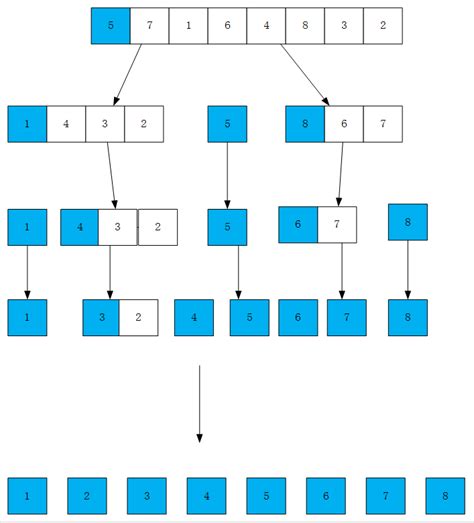
快速排序是Hoare于1962年提出的一种二叉树结构的交换排序方法,其基本思想为:任取待排序元素序列中的某元素作为基准值,按照该排序码将待排序集合分割成两子序列,左子序列中所有元素均小于基准值,右子序列中所有元素均大于基准值,然后最左右子序列重复该过程,直到所有元素都排列在相应位置上为止。
而对于基准值,我们一般取得是第一个元素。每执行一次微排序就确定了目前的基准值的位置,再次将基准值左边的部分和右边的部分分别进行微排序(递归),直至最终完全有序即可
1. hoare版本
微排序分析
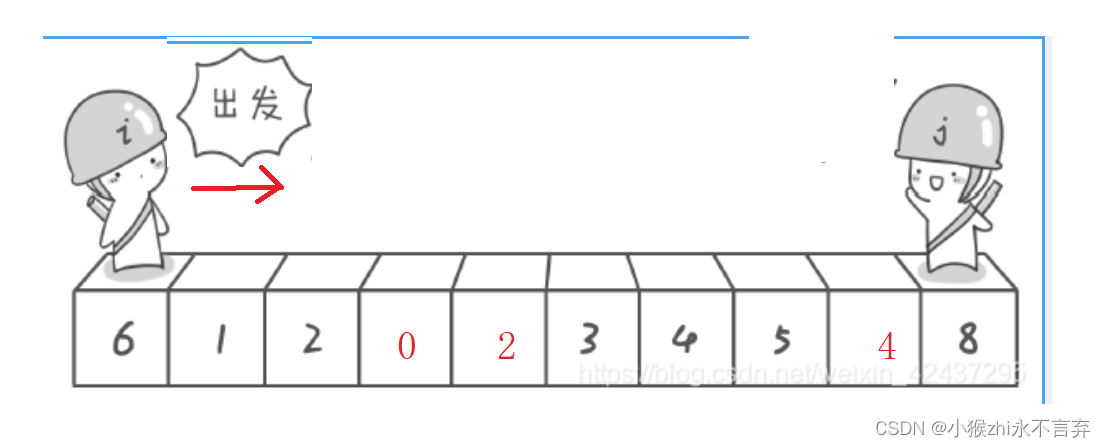
此时设定基准数(key)对应的值就是6,i 和 j分别就是从两头开始走,直到相遇就停止,此时进行最后一步,将相遇点和基准值交换,最终目的是:左子序列中所有元素均小于基准值,右子序列中所有元素均大于基准值。
所以我们就在左边找大于key的值,右边找小于key的值,找到就进行交换,此时问题就来了
- 谁先走呢?
- 左边是从key开始还是从下一个元素开始呢?



3. 最后相遇的值与基准值交换位置,那如果相遇的值大于key呢?那交换不就会出错吗?

分析问题:
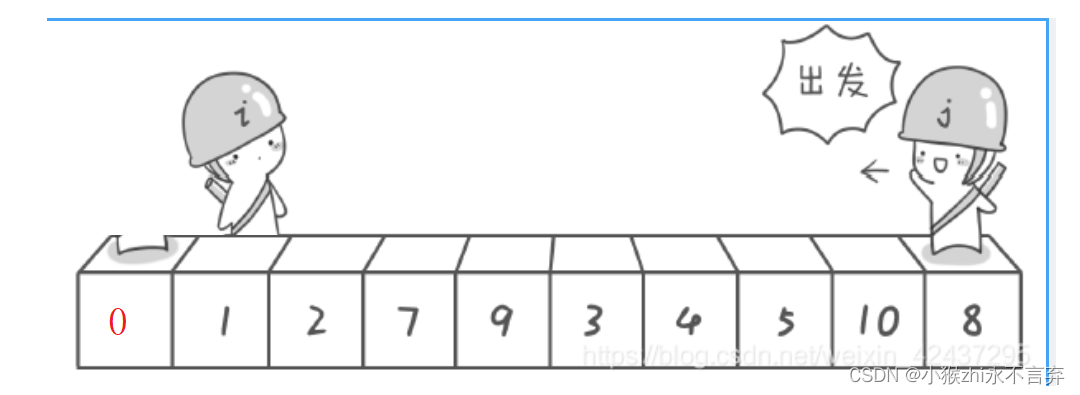
- 假如说我们不从右边开始走,而是从左边开始走,而左边是找较大值,此时下面这种情况就会相遇在数字8的位置,基准值与数字8交换,这样就出错了。但是我们如果让右边的先走,找较小值,最后就会停在较小值的位置。
- 即使是没找到的话也是和左边的基准值相遇,和自己交换,也不影响,而右边恰恰也都是大于key的值。
- 即使是在相遇之前已经发生过交换,也是将较小值换到左边,从而右边先走,最终可能相遇,相遇点是左边占着的点,也是小于key的值,交换也是将较小值换到基准值的位置。
- 但是如果左边先走找较大值,最后交换的就极可能会是较大值。所以基准值定在最左边,此时右边先走不仅是正确的交换,而且还保证的最后相遇的一定是小于基准值的值。
- 如果基准值定在最右边就得让左边的先走了。
- 假如说左值不是从基准值开始走,而是从基准值下一个位置开始走。此时下面这种情况:如果基准值是最小值的话,就会在1的位置相遇,将1与基准值交换,所以就会出错,所以左边从基准值开始走就保证了此情况。
微排序代码
int Part1Sort(int* arr, int left, int right)
{
int keyi = left;/基准值下标
while (left < right)
{
//右边找小于arr[keyi]的值
while (left<right&&arr[right] >= arr[keyi])
right--;
//左边找大于arr[keyi]的值
while (left<right&&arr[left] <= arr[keyi])
left++;
Swap(&arr[left], &arr[right]);
}
//left=right
Swap(&arr[left], &arr[keyi]);
return left;//返回相遇值的下标
}外层循环条件就是 left<right,同时也要保证内部找较大较小值时 left<right,防止在找值的过程中就发生了越界,而且如果找到的值与基准值相等的话也继续找,防止左右都找到与基准值相等的值时,发生死循环的交换。
快排递归写法
//递归部分
void QuickSort(int* arr,int left,int right)
{
if (left >= right)
return;
int keyi = Part1Sort(arr, left, right);
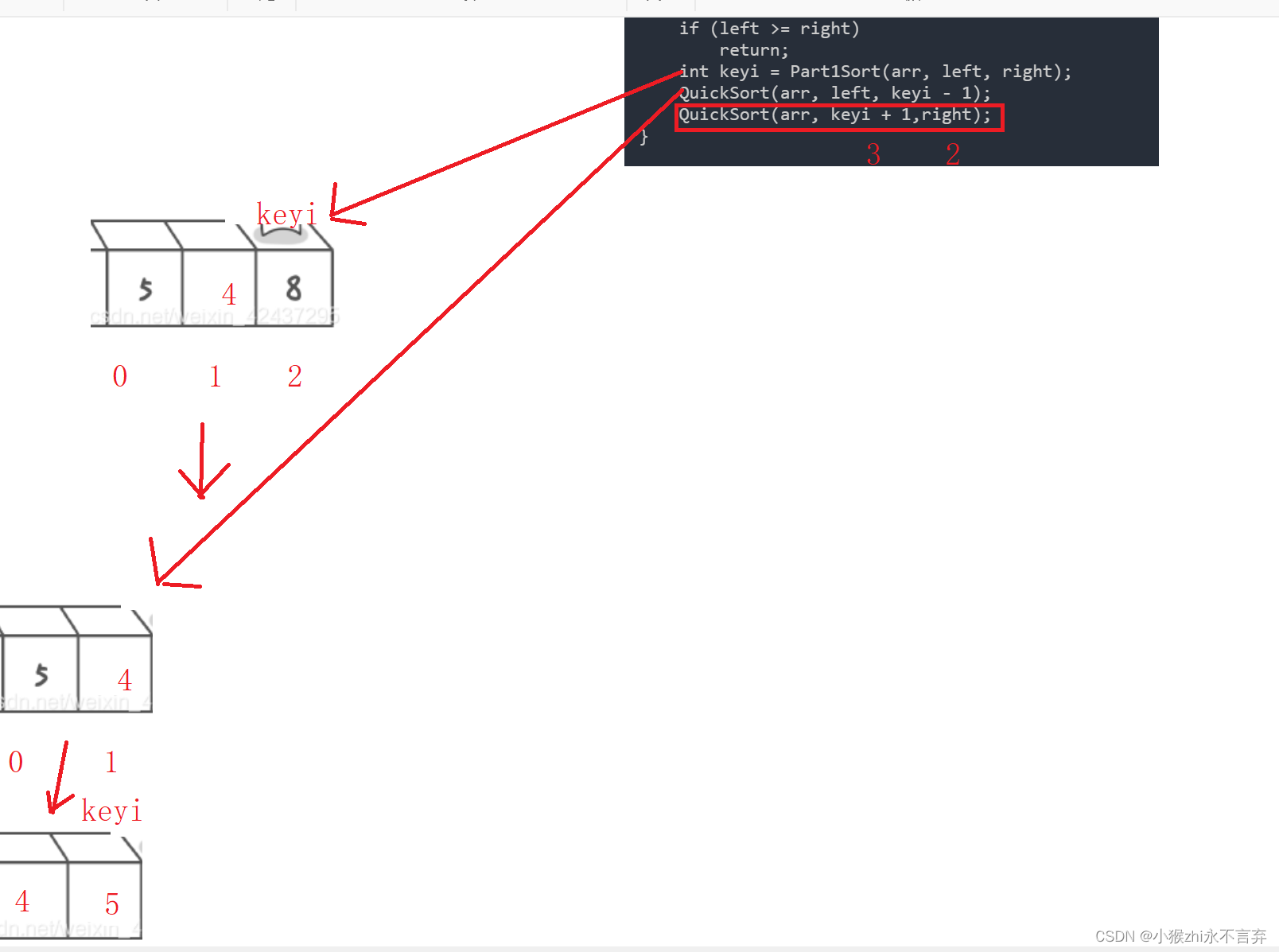
QuickSort(arr, left, keyi - 1);
QuickSort(arr, keyi + 1,right);
}这里主要就是分析一下停止条件:即区间left和right之间只剩最后一个数或者没有数的情况
快排非递归写法(栈模拟)
void QuickSort(int* arr, int left, int right)
{
int* stack = (int*)calloc(right,sizeof(int));//模拟栈
assert(stack);
int top = 0;//栈中元素个数
//将区间存进栈里
stack[top++] = left;//先压入左区间再压右区间
stack[top++] = right;//所以出栈是先出右再出左
while(top)//判断是否为空
{
int r = stack[--top];//出栈(右)
int l = stack[--top];//出栈(左)
int keyi = Part1Sort(arr, l, r);//基准值下标
if(l<keyi-1)
{
stack[top++] = l;
stack[top++] = keyi - 1;
}
if(keyi+1<r)
{
stack[top++] = keyi + 1;
stack[top++] = r;
}
}
free(stack);//防止内存泄露
}2.挖坑法

其实挖坑法也是通过霍尔的思想改了一下,原理都是一样的,只不过更容易理解一点。就是先将基准值的值存起来,形成坑位,同样是从右边开始找较小值,找到了就将该较小值填在原来的坑里,此处形成新的坑,再从左边开始找较大值,填到坑里,并形成新的坑......最后一定是在坑中相遇,将基准值填入坑中就算完成一次微排序。
代码
int Part2Sort(int* arr, int left, int right)
{
int key = arr[left];
int hole = left;
while (left < right)
{
//找小
while (left<right&&arr[right] >= key)
right--;
arr[hole] = arr[right];//找到小于key的值就填坑
hole = right;//形成新的坑
//找大
while (left < right && arr[left] <= key)
left++;
arr[hole] = arr[left];//找到对于key的值就填坑
hole = left;//形成新的坑
}
//在坑的位置相遇
arr[hole] = key;
return hole;
}3.前后指针法

这种方法就是遍历一遍,将大于基准值的数向后拨。一前一后两个指针,如果cur指向的值小于基准值,就pre++再交换,如果cur指向的值大于基准值就cur++。在循环遍历的过程中始终保持着(left,right]之间的数值都是大于基准值key的,最后循环出来将left与基准值的位置交换。
代码
int Part3Sort(int* arr, int left, int right)
{
int keyi = left;
int pre = left;
int cur = left + 1;
while (cur <= right)//等于时cur指向最后一个数
{
if (arr[cur] <= arr[keyi])
{
pre++;
Swap(&arr[pre], &arr[cur]);
}
cur++;
}
Swap(&arr[keyi], &arr[pre]);
return pre;
}分析优化
三数取中间值法选key
我们知道当快排遇见一组有序的数组序列时,可能就是最麻烦的,此时的时间复杂度就是O(n^2),而正常无序的序列是O(n*log n),所以可以看出当基准值越接近一组数据的中位数时,所花费的时间是最少的,所以就有了三数取中法选key
代码
int midi(int* arr, int left, int right)
{
int midi = (left + right) / 2;
if (arr[left] < arr[right])
{
if (arr[left] < arr[midi])//left最小
{
if (arr[midi] > arr[right])
return right;
else
return midi;
}
else
return left;
}
else
{
if (arr[left] < arr[midi])//left最小
return left;
else if (arr[midi] > arr[right])//left最大
return midi;
else
return right;
}
}int tmpi = midi(arr, left, right);//将基准值放到最左边
Swap(&arr[left], &arr[tmpi]);//将中间值设为基准值三路划分法
当遇到完全相同的一组数据时,此时的快排就非常的慢了,每次处理一个数时间复杂度是 O(n^2),所以就有了另一种优化方法:三路划分法,这种方法就是在快排的Hoare法和前后指针法的基础下得出的新方法。最终目的:将与基准值相同的一组数放到中间,左子区间依然是小于key的值,右子区间依然是大于key的值。
我们知道Hoare法实际就是左右数与key比较,将数据划分成三部分,而前后指针法就是从前向后遍历,将大于key的值拨到后面去。而对于三路划分其实就是基于以上思想,用到三个指针,left,cur,right 三个指针,left.基于最左边,right基于最右边,然后cur从前向后进行遍历。在移动的过程中始终尽量保证[left,cur]区间内维护的数据是等于基准值key的。
此时三路划分就是在以上基础下将与key相同的值一起拨到后面去,在将较小值换到左边,较大值换到右边
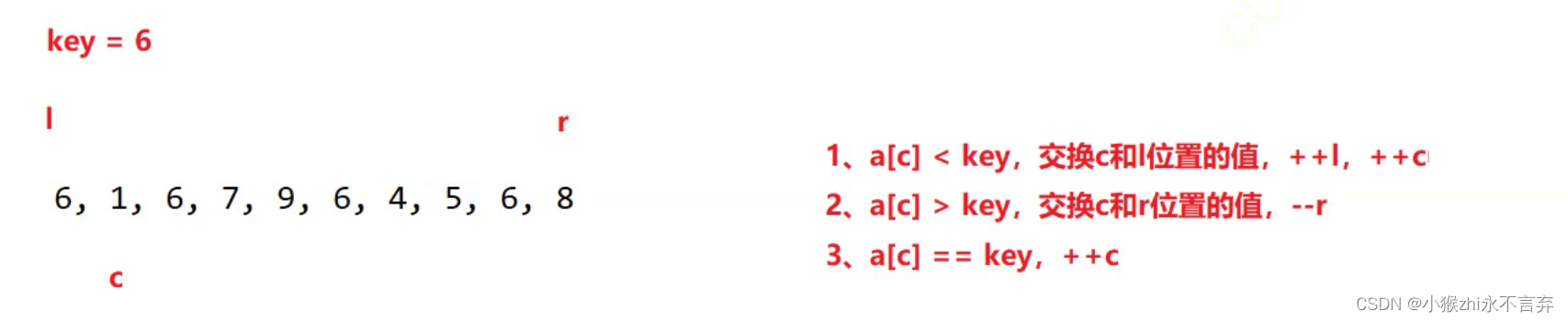
最终l的左边是小于key的值,r的右边就是大于key的值,中间恰恰是与key相等的值。
代码
void QuickSort(int* arr, int left, int right)
{
if (left >= right)
return;
int tmpi = midi(arr, left, right);
Swap(&arr[left], &arr[tmpi]);
int l = left, cur = l + 1;
int r = right;
int key = arr[left];
while (cur <= r)
{
if (arr[cur] > key)
{
Swap(&arr[cur], &arr[r]);
r--;
}
else if (arr[cur] < key)
{
Swap(&arr[cur], &arr[l]);
cur++; l++;
}
else
{
cur++;
}
}
QuickSort(arr, left, l - 1);
QuickSort(arr, r + 1, right);
}这种算法还可以针对自己任意设置的一个基准值进行处理,只不过cur的指向从left开始而不是left+1。一道经典leetCode题目解法就是基于该三路划分:75. 颜色分类 - 力扣(LeetCode)



















 4万+
4万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











