



2024-06月份更新篇章:
2024年已经过半,这半年中花了大量的时间打造硬件大熊新的硬件产品,导致投放在撰写公众号文章的精力上少之又少。好在现在精力又开始聚焦,接下来会有更多的精力倾斜到公众号上。
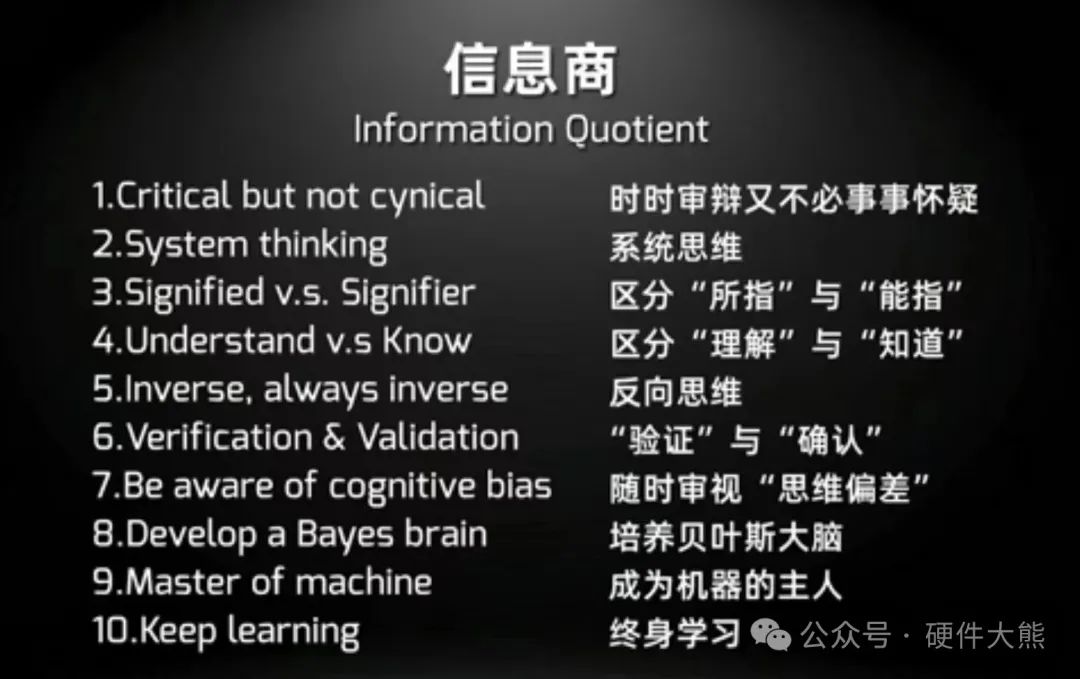
上半年对AI做了重点关注,新的人机时代,初看是技术问题,其实细看全是关于人的问题,分享如下关于信息商的言论(来自:韦青 微软中国公司首席技术官)给各位,看是否能给你带来共鸣——
下半年,继续努力开发新产品、坚持写文章,期待在积累到足够多的产品实战经验与文字输出之后,能汇总梳理成一本PDF书籍分享给各位。
——硬件大熊原创合集——
电路分析
专题系列
开关面板
NFC设计
声学
传感器设计
Smith圆图
智能门锁
智慧屏
高速信号PCB设计
工艺制程
设计美学
测试分析
算法思维
器件选型
工具
工程师的思考
原创不易,若有转载需求,务必告知!
如果我的文字对你有所启发或帮助,
“点赞\转发”是对我最大的支持


















 1216
1216

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









