



原文链接:学术成果丨综述:面向自动驾驶的局部矢量化高精地图构建
点击下方卡片,关注“自动驾驶之心”公众号
>>自动驾驶前沿信息获取→自动驾驶之心知识星球
本文只做学术分享,如有侵权,联系删文

上海交通大学智能网联电动汽车创新中心团队在钱烨强和杨明老师指导下,于智能交通领域旗舰期刊IEEE Transactions on Intelligent Transportation Systems(T-ITS)上发表题为“Local Vectorized High Definition Map Construction for Autonomous Driving: A Comprehensive Review”的综述论文。文章系统梳理了局部矢量化高精地图构建(LV-HDMC)的演进脉络,将“真值制作—网络结构—评测基准”纳入统一任务框架进行全景式剖析。通过归纳现有范式在特征提取与地图解码环节的网络结构差异,辅以详尽的定性定量对比,系统揭示了各类方法在精度、效率与鲁棒性上的具体表现。在此基础上,文章进一步指出当前局部建图领域的关键瓶颈,并给出可扩展、可落地的研究路线,为自动驾驶局部建图技术提供新的理论视角与实践路径。本文第一作者是自动化与感知学院2023级硕士生张洋榕。

01
研
究
背
景
Research Background
随着自动驾驶迈入产业化关口,厘米级环境表征正成为决定安全与智能上限的关键因素。传统全局高精地图依赖昂贵的测绘车与人工后处理,更新周期长、维护成本高,难以匹配城市场景的快速演化,“无图”方案因此呼声渐高。然而,完全摒弃先验信息又使感知系统陷入“单帧幻觉”困境,尤其在复杂路口、施工区域等强语义场景中,实时生成局部、可扩展、实例级高精地图的需求愈发迫切。
车载相机与激光雷达的算力红利,使“边行驶边建图”成为可行路线:通过传感器在线感知,在鸟瞰视角下即时恢复车道线、路缘、交通标志等矢量要素,从而既保留高精地图的几何—语义一致性,又摆脱对全局底图的依赖,为后续定位、预测与规划提供轻量化、可差分更新的局部先验。由此,局部矢量化高精地图构建(LV-HDMC)应运而生,以有序点集表示地图实例,天然对齐下游控制所需的连续参数曲线,成为连接“重地图”与“无地图”范式的关键桥梁。
02
研
究
现
状
Current Reserach
随着局部矢量建图技术自2023年以来的迅速发展,相关论文已超过五十篇。然而,针对该领域的系统性综述仍然缺乏。现有综述多将矢量建图作为BEV感知或广义高精地图综述的附属章节,侧重于栅格语义分割或SLAM位姿优化,对实例级矢量解码、真值自动化生产、基准指标等核心问题着墨甚少。因此,亟需一篇聚焦局部矢量建图领域的专属综述,从任务形式、数据真值、网络结构、评测协议到未来趋势进行全景式梳理,以统一视角推动该方向从“方法涌现”走向“系统成熟”。
03
研
究
成
果
Research Results
本综述首次对“局部矢量化高精地图构建”这一新兴领域进行了全景式梳理:从地图演进的视角厘清任务由来,按照“真值生成—特征提取—解码重建”三大环节对现有方法进行系统分类,并汇总截至2024年底的最完备的性能对照表与公开数据集。
为了展示高精地图构建任务的发展脉络,综述首先回顾了局部矢量建图出现之前的相关研究工作,涵盖传统测绘手段以及近期基于局部语义栅格地图的方法;随后深入解析局部矢量建图任务,阐明其与早期任务在目标、表征与输出格式上的异同。
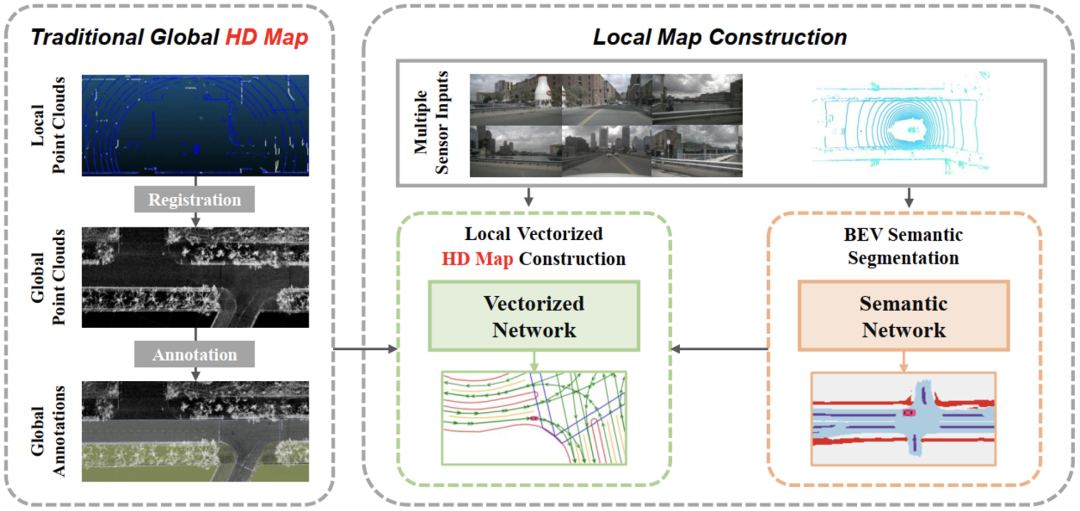
高精地图构建任务发展示意图
本综述还系统总结了目前局部矢量建图领域的真值构建方法。由于此类真值难以直接获取,且缺乏统一而严格的表示规范,优化真值生成流程已成为提升网络性能的关键。本综述将真值生成过程划分为两个主要步骤:(1)局部区域获取与地图元素表征。局部区域获取指在车辆当前位置的鸟瞰(BEV)范围内采集所有要素;(2)地图元素表征则将这些要素按局部矢量建图任务所需类别划分,并以矢量点集形式加以描述。
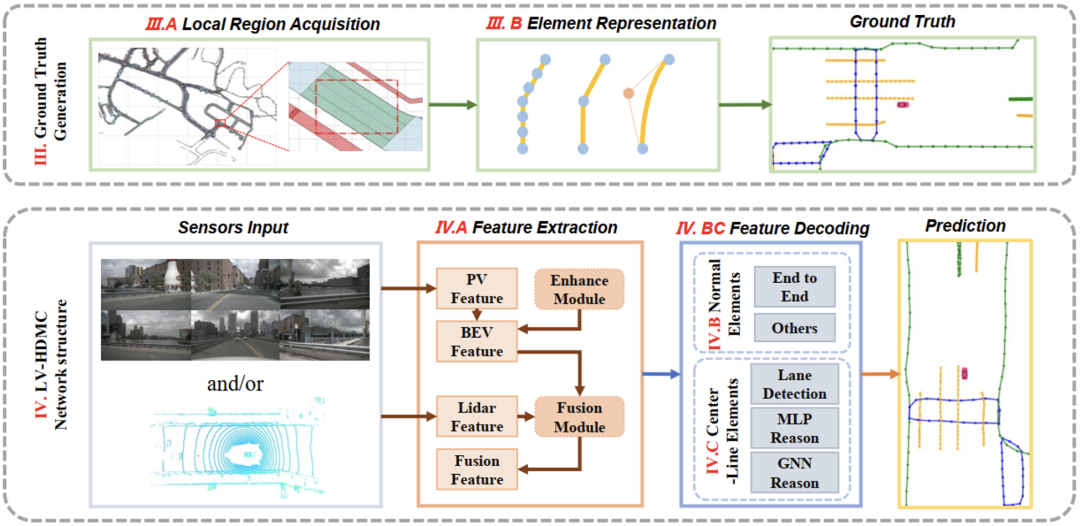
局部矢量建图框架整理示意图
同时,由于当前主流模型普遍遵循“特征提取—特征解码”的固定范式,本综述系统梳理了现有方法的网络结构,重点分析特征提取与地图解码两大模块。在特征提取方面,综述依据传感器输入模态对现有方法进行分类;在地图解码方面,则进一步区分为常规地图元素解码与中心线解码。前者按DETR与非DETR两条路线加以归纳,并比较总结其主要改进策略;后者由于涉及复杂的图拓扑建模,被进一步拆分为两个子模块,综述重点介绍并归类了不同的图拓扑建模思路,以应对中心线预测带来的独特挑战。
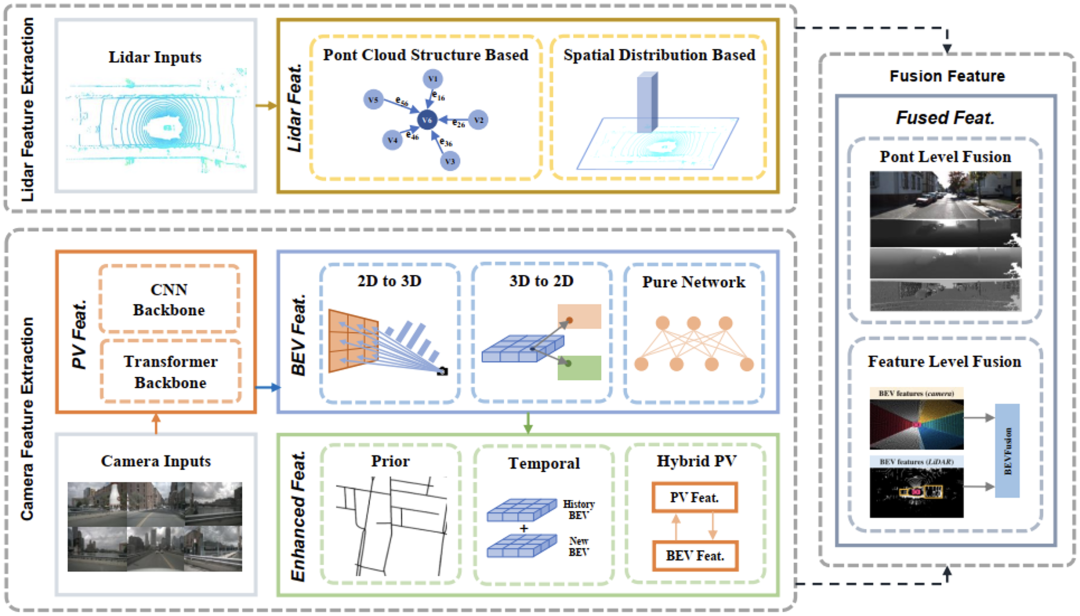
BEV特征提取系统整理示意图
此外,本综述系统梳理了局部矢量建图领域采用的性能评价指标,并介绍了当前任务中最常用的公开数据集。基于上述指标与数据集,综述系统整理并构建了三类对比基准表,遴选在精度、实时性与网络架构方面具有代表性的研究方法纳入其中,全面展现了目前各类局部矢量建图方法的研究现状与方法演进特征。最后,综述还深入剖析了当前局部矢量建图任务面临的主要问题,并对其未来的发展方向进行了全面展望。
论文链接:
https://ieeexplore.ieee.org/document/11224924
04
作
者
信
息
Author Information

张洋榕,上海交通大学自动化与感知学院2023级硕士研究生。研究方向:智能驾驶感知、高精地图构建、以及计算机视觉。

钱烨强,上海交通大学自动化与感知学院,长聘教轨副教授,博士生导师。近年来发表国内外期刊会议论文40余篇,以第一/通讯作者身份发表IEEE Trans系列长文15篇。主持国家自然科学基金面上、青年等项目。担任机器人会议IEEE IROS 2023-2025编委等职务。获得SAA最佳博士学位论文,全国自动化教育学术年会优秀论文,上海市技术发明一等奖等奖项。研究方向:端到端自动驾驶与驾驶仿真。

杨明,上海交通大学特聘教授,博士生导师,全国宝钢优秀教师,国家“万人计划”科技创新领军人才,上海交通大学智能网联电动汽车创新中心主任。现任中国自动化学会智能车工委会副主任和教工委副主任、中国人工智能学会理事和智能机器人专委会副主任、IEEE IROS-CPRB副主编、《IEEE Transactions on Intelligent Vehicles》和《IEEE Transactions on Intelligent Transportation Systems》期刊编委。长期从事无人车和智能机器人等方面教学与研究工作,近年来在国内外学术刊物上发表论文200余篇,获国家发明专利授权50余项,指导学生多次获得IEEE Intelligent Vehicle Symposium、中国智能机器人大会等国内外顶级会议优秀论文。作为负责人,先后获得上海市技术发明一等奖、上海市教学成果一等奖、教育部技术发明奖等奖项。
自动驾驶之心
论文辅导来啦

自驾交流群来啦!
自动驾驶之心创建了近百个技术交流群,涉及大模型、VLA、端到端、数据闭环、自动标注、BEV、Occupancy、多模态融合感知、传感器标定、3DGS、世界模型、在线地图、轨迹预测、规划控制等方向!欢迎添加小助理微信邀请进群。

知识星球交流社区
近4000人的交流社区,近300+自动驾驶公司与科研结构加入!涉及30+自动驾驶技术栈学习路线,从0到一带你入门自动驾驶感知(大模型、端到端自动驾驶、世界模型、仿真闭环、3D检测、车道线、BEV感知、Occupancy、多传感器融合、多传感器标定、目标跟踪)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、大模型,更有行业动态和岗位发布!欢迎加入。

独家专业课程
端到端自动驾驶、大模型、VLA、仿真测试、自动驾驶C++、BEV感知、BEV模型部署、BEV目标跟踪、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、车道线检测、轨迹预测、在线高精地图、世界模型、点云3D目标检测、目标跟踪、Occupancy、CUDA与TensorRT模型部署、大模型与自动驾驶、NeRF、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频
学习官网:www.zdjszx.com

















 17万+
17万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









