




论文链接:https://www.arxiv.org/abs/2509.10570
作者单位:西交利物浦大学,澳门大学,利物浦大学,香港科技大学(广州)
摘要与引言
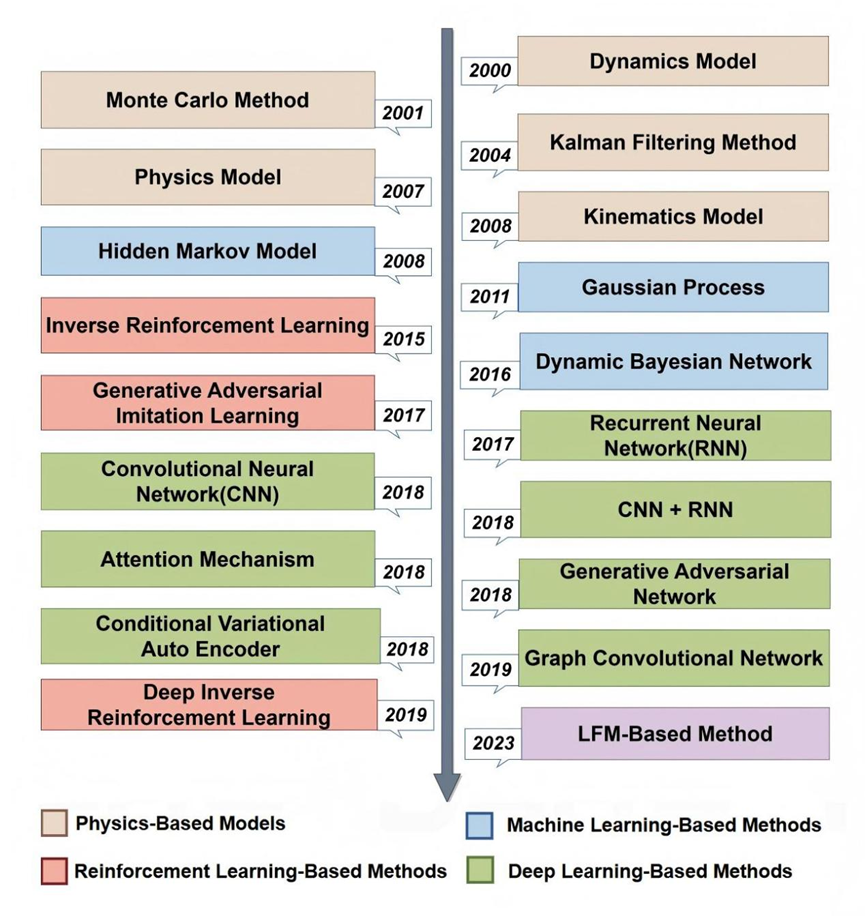
这篇综述探讨了将大语言模型(LLMs)和多模态大语言模型(MLLMs)等大型基础模型应用于自动驾驶轨迹预测的新范式 。这种方法通过整合语言和情境知识,使自动驾驶系统能更深入地理解复杂的交通场景,从而提升安全性和效率。文章回顾了从传统方法到由LFM引入的范式转变,涵盖了车辆和行人的预测任务、常用的评估指标和相关数据集 。它详细介绍了LLM的三种关键应用方法:轨迹-语言映射、多模态融合和基于约束的推理,这些方法显著提高了预测的可解释性和在长尾场景中的鲁棒性 。尽管LLM有诸多优势,但也面临计算延迟、数据稀缺和真实世界鲁棒性等挑战 。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









