 自动驾驶之心知识星球介绍
自动驾驶之心知识星球介绍




点击下方卡片,关注“自动驾驶之心”公众号
知识星球最近有小伙伴面了新势力的提前批,结果面试官最后来个三连问,都是开放性的非技术问题。
这些问题,如果没有提前思考过,很容易出篓子。。。
(向峰哥和柱哥提问,欢迎加入『自动驾驶之心知识星球』)
柱哥你好,我是今年校招的应届生,感知选手(有BEV和一些预测方向的经验),最近参加了几家新势力提前批的面试,面试中一些技术相关的问题都没什么大问题,但确实刚开始面试有点紧张,答的也比较快,然后手撕中等题目。
面试快结束的时候,面试官问了我很多非技术问题,感觉从来没思考过,被问懵了。。。
问我想做什么方向? (当场懵...最近VLA和大模型很火,星球里面最近相关工作推进也很多,就说想做大模型和VLA相关的方向)
我们这边你来了都是有mentor来带的?你怎么跟他们交流? (懵逼+1,我就正常交流啊,我还能怎么交流。。)
平常如何快速上手新领域? (答了用大模型...)
彻底懵了,而且感觉回答的,面试官并不满意,主要是这些问题,我不知道面试官关注的点在哪里?
星主回答:
1、这个就几何你自己的兴趣和经验展开来说就好,没什么标准的答案。但你最好思考过,这里面试官隐含的考察你有没有自己的主见。其实很多校招生都不知道自己想做什么。。。找学长学姐或者网上提前了解面试大部门的业务,如果觉得不错可以靠一靠,一方面会吸引面试官感兴趣,甚至最后分配的时候会被点名要过去。另一方面你在回答这个问题的时候也可以适当问问面试官团队是在做什么方向工作,这样也算是有个渠道了解业内实际的工作方向。
2、面试官是想了解,你沟通能力怎么样?是不是一个“好带的人”。没有实习经历的人可能没这种体会,如果在实验室和学长学姐沟通也类似。你可以这么说:我习惯接手一个任务时先判断熟悉程度,一般会先自己整体调研下这个方向,遇到不会的地方记录下来,跟mentor表达自己做了哪些工作,自己想如何推进,再问问mentor的意见。调研的过程也会配套做文档的记录和关键点的记录。一个非常需要注意的点,不要什么问题上来就去请教,而是带着自己的思考去请教。
3、这个主要是看你学习能力。你学习一个新的技术领域,如何构建从面到线的技术认知。你需要有基本的判断,然后再结合大模型去学习。你可以这么说:我习惯先建立全局认知,比如通过官方文档、架构博客了解整体系统设计,再聚焦关键模块读源码和调试。如果有时间 自己做笔记输出总结,没时间就以项目进度为主,像我做BEV项目时就是这样入门的,先了解BEV感知是什么,有哪些子领域(纯视觉/多模态等等)。对大局有足够了解后,我习惯再用大模型学习一些细节等等。
当然,以上的回答,建议融合一些自己的独特经历,而且回答的时候,别太顺溜,好像提前背过一样。。。同时也记得和面试官互动。
自动驾驶之心知识星球,截止到目前已经完成了产业、学术、求职、问答交流等多个领域的闭环。几个运营的小伙伴每天都在复盘,什么样的社区才是大家需要的?我们有没有什么地方没有考虑到?花拳绣腿的不行、没人交流的也不行、找不到工作的更不行。

于是我们就给大家准备了学术领域最前沿的内容、工业界大佬级别圆桌、开源的代码方案、最及时的求职信息...
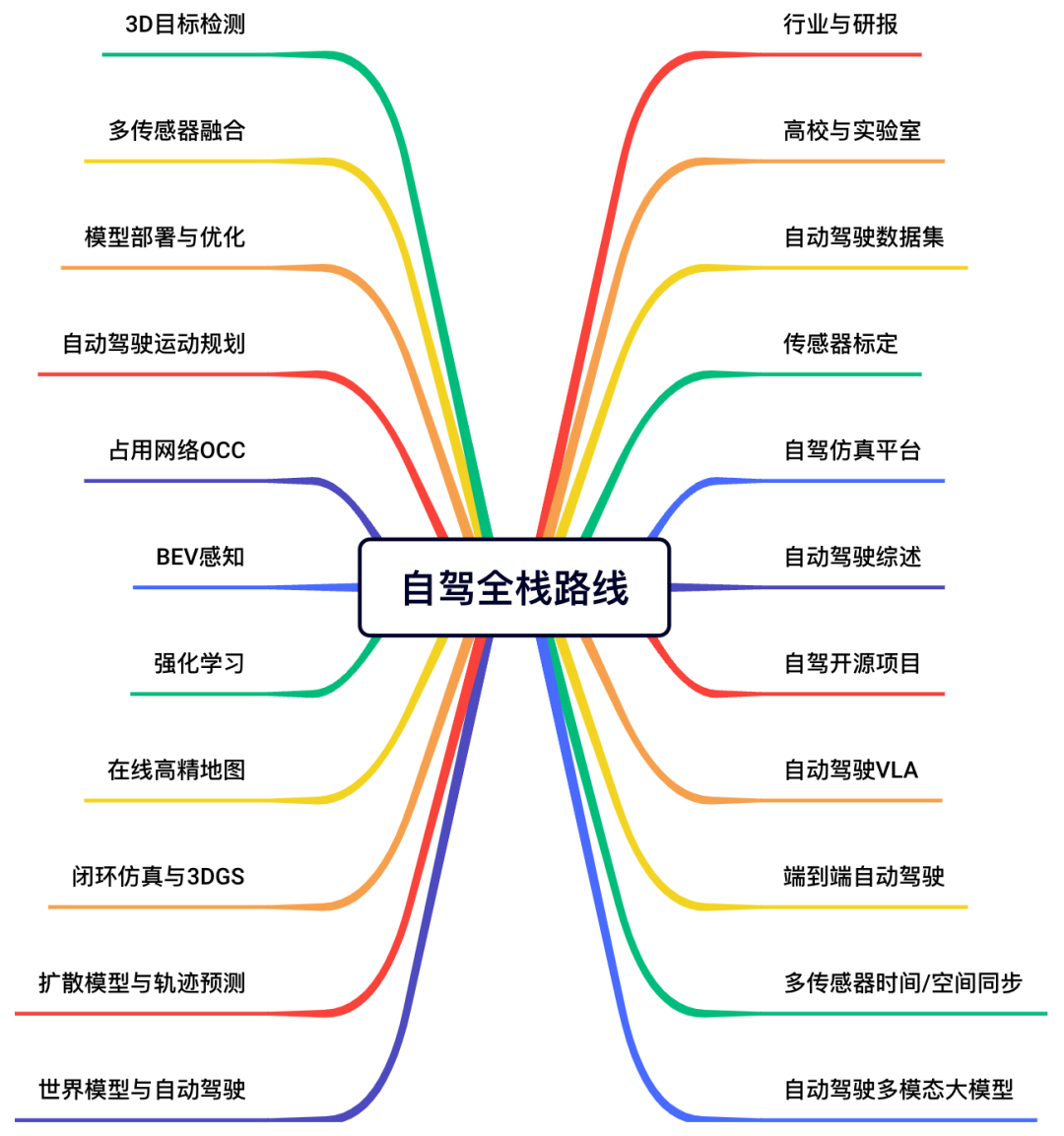
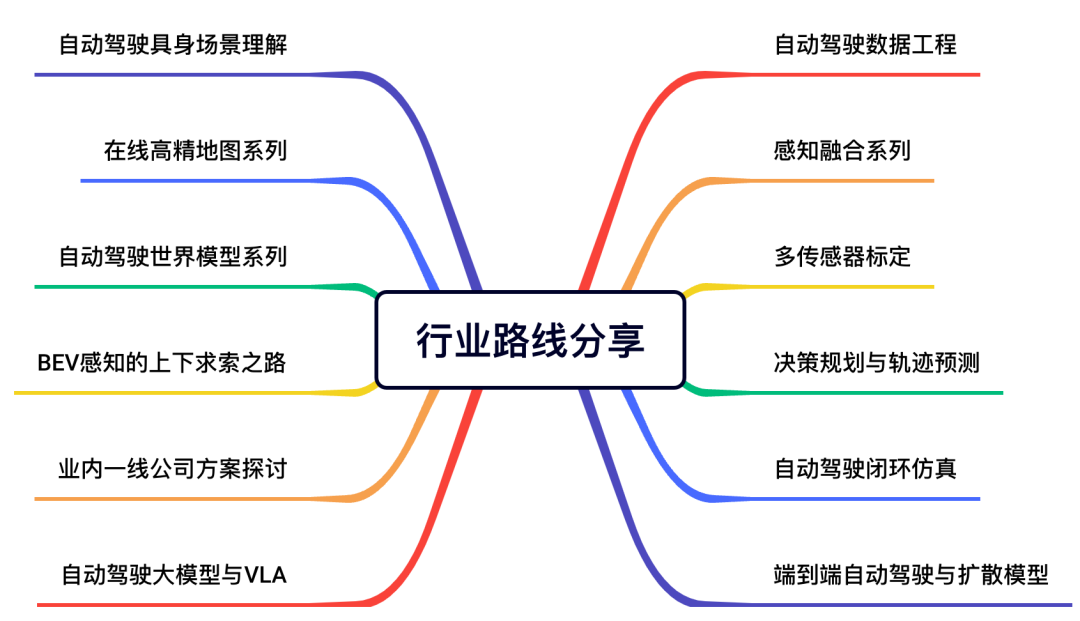
星球内部为大家梳理了近40+技术路线,无论你是咨询行业应用、还是要找最新的VLA benchmark、综述和学习入门路线,都能极大缩短检索时间。星球还为大家邀请了数十位自动驾驶领域嘉宾,都是活跃在一线产业界和工业界的大佬(经常出现的顶会和各类访谈中哦)。欢迎随时提问,他们将会为大家答疑解惑。
我们是一个认真做内容的社区,一个培养未来领袖的地方。


我们还和多家自动驾驶公司建立了岗位内推机制,欢迎大家随时艾特我们。第一时间将您的简历送到心仪公司的手上。

针对入门者,我们整理了完备的小白入门技术栈和路线图。
已经从事相关研究的同学,我们也给大家提供了很多有价值的产业体系和项目方案。
还有源源不断的求职、岗位分享哦,欢迎和我们一起打造完整的自驾生态。
国内首个自驾全栈社区:自动驾驶之心知识星球
社区创建的出发点是给大家提供一个自动驾驶相关的技术交流平台,交流学术和工程上的问题。星球内部的成员来自国内外知名高校实验室、自动驾驶相关的头部公司,其中高校和科研机构包括但不限于:上海交大、北京大学、CMU、清华大学、西湖大学、上海人工智能实验室、港科大、港大、南洋理工、新加坡国立、ETH、南京大学、华中科技大学、ETH等等!公司包括但不限于:蔚小理、地平线、华为、大疆、广汽、上汽、博世、轻舟智航、斑马智行、小米汽车、英伟达、Momenta、百度等等。前沿技术聚集地一直是自动驾驶之心的标签!
我们为大家汇总了近40+开源项目、近60+自动驾驶相关数据集、行业主流自驾仿真平台、以及各类技术学习路线,包括但不限于:
自动驾驶感知学习路线 | 自动驾驶仿真学习路线 | 自动驾驶规划控制学习路线 |
|---|---|---|
端到端学习路线 | 3DGS原理 | 基于搜索的规划 |
VLA学习路线 | NeRF原理 | 基于采样的规划 |
多模态大模型 | Carla仿真 | 基于车辆运动学的规划 |
占用网络 | Apollo仿真 | 基于数值优化的规划 |
BEV感知 | Autoware仿真 | 横纵解耦规划框架 |
扩散模型 | 联合仿真 | 横纵联合规划框架 |
世界模型 | 自驾仿真产品架构分析 | 基于几何的路径跟踪 |
多传感器融合 | 闭环仿真 | 模型预测控制 |
轨迹预测 | 相关数据集 | 联合预测 |
...... | ...... | ...... |
这里能够让小白快速入门,让已经入门的同学进一步提升,已经提升的同学结交更多的朋友。
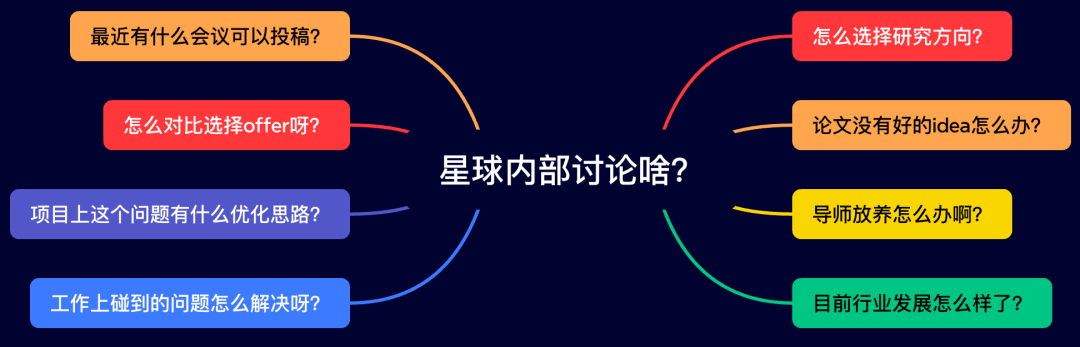
日常分享和讨论的问题
传统规控怎么转VLA?
自动驾驶多模态大模型预训练数据集有哪些?
自驾VLA微调数据集有哪些?
3DGS和闭环仿真如何结合?
世界模型到底如何落地应用?
业内哪家公司前景好一些,适合跳槽,都有什么岗位开放招聘?
博士入学,哪个方向容易出成果?
闭环强化学习如何入门?
端到端自动驾驶学习路线推荐?
......
加入星球有哪些福利?
第一时间掌握自动驾驶相关的学术进展、工业落地应用;
和行业大佬一起交流工作与求职相关的问题;
优良的学习交流环境,能结识更多同行业的伙伴;
星球内部专属学习视频,搭配文档不枯燥;
自动驾驶相关工作岗位推荐,第一时间对接企业;
行业机会挖掘,投资与项目对接。
星球内容一览
星球内容一览!
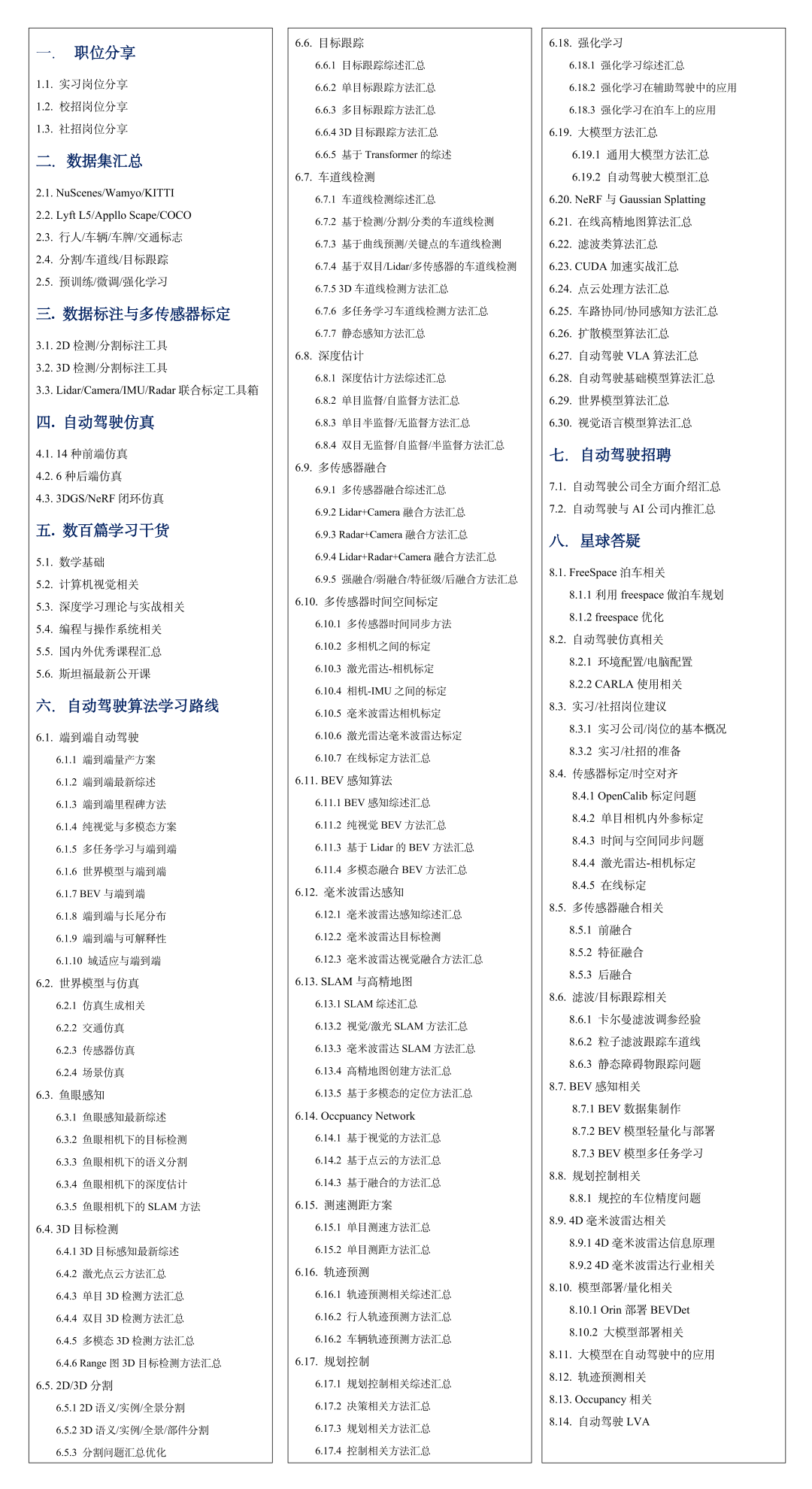
0)国内外自动驾驶与机器人高校汇总
星球内部为大家汇总了自动驾驶&机器人多个研究方向的国内外知名实验室,供大家后期读研、申博、博后参考。
1)国内外自动驾驶公司汇总
星球内部为大家汇总了各类国内外各类自动驾驶相关机器人公司,涉及RoboTaxi、重卡业务、造车新势力等等!
2)自动驾驶及CV相关书籍汇总
星球内部汇总了自动驾驶和CV相关的学习书籍,涵盖数学基础、计算机视觉、深度学习入门、coding、运动规划、自动驾驶传感器、ROS系统学习指南等等~
3)开源项目汇总
星球内部针对3D目标检测、BEV感知、世界模型、闭环仿真3DGS、自动驾驶大模型、端到端自动驾驶等多个领域的开源项目进行了汇总,助力快速上手。
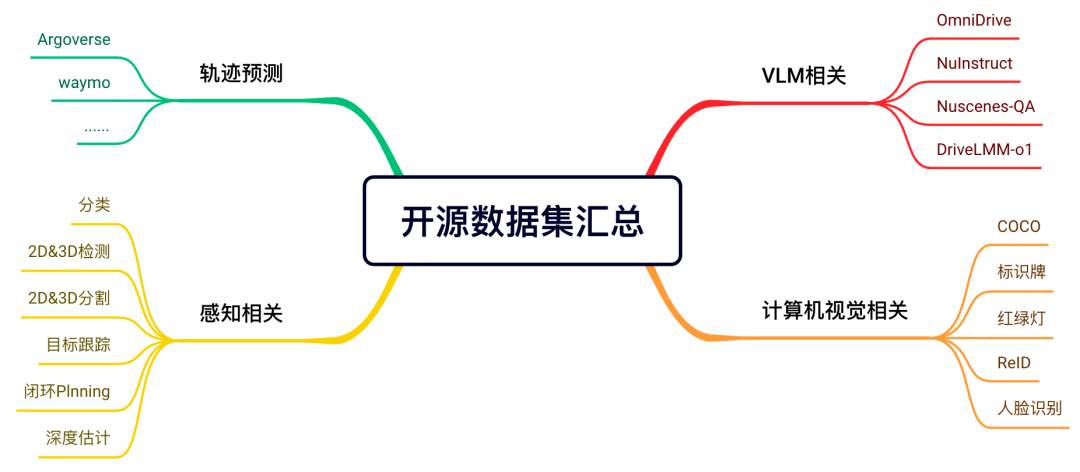
4)自动驾驶开源数据集
星球内部针对自动驾驶相关数据集进行了详细的梳理,针对通用CV数据集、感知相关数据集、轨迹预测等等。尤其是自动驾驶多模态大模型数据集,我们详细梳理了自动驾驶VLM预训练数据集、微调数据集、思维链数据集、强化学习数据集等等~
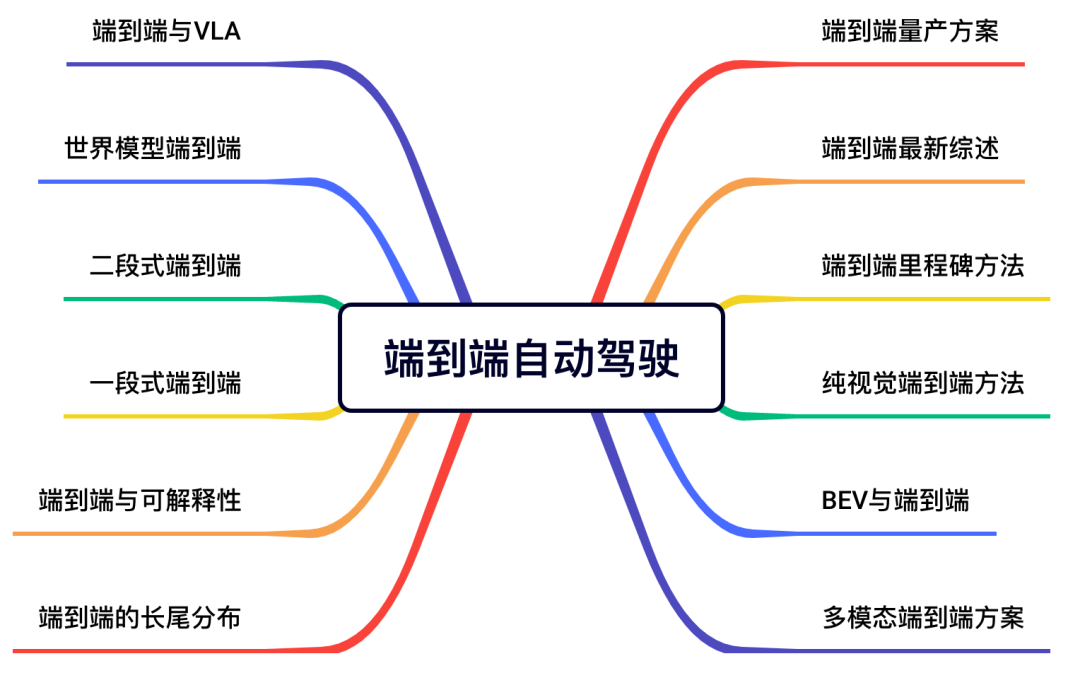
5)端到端自动驾驶
针对学术界和工业界的研究热点 - 端到端自动驾驶,我们详细梳理了一段式端到端、二段式端到端、量产方案、综述汇总、里程碑方法、VLA相关算法等等,兼顾学术界和工业界,真正做到知行合一!
6)3DGS与NeRF
我们为大家汇总了3DGS和NeRF的相关技术领域,3DGS的算法原理、自动驾驶场景重建与闭环仿真、NeRF与自动驾驶仿真,NeRF与自动驾驶感知,同时我们也邀请到诸位学术界大佬分享3DGS和NeRF的最新工作,这里全都有!

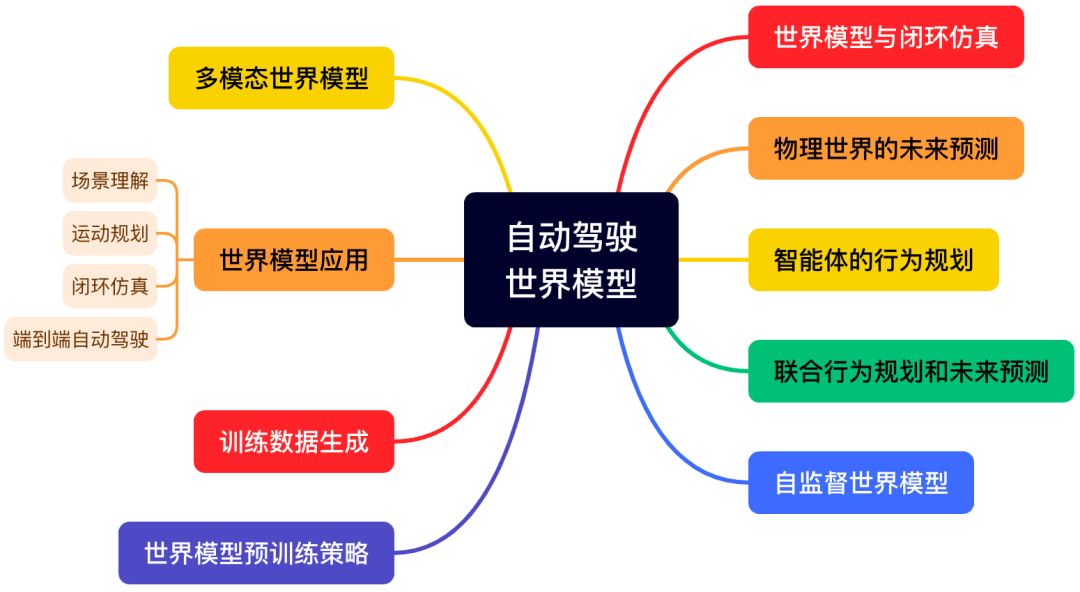
7)自动驾驶世界模型
针对当前学术界和工业界的热点 - 自动驾驶世界模型,星球内部做了详细的汇总,涵盖技术前沿和业界应用。
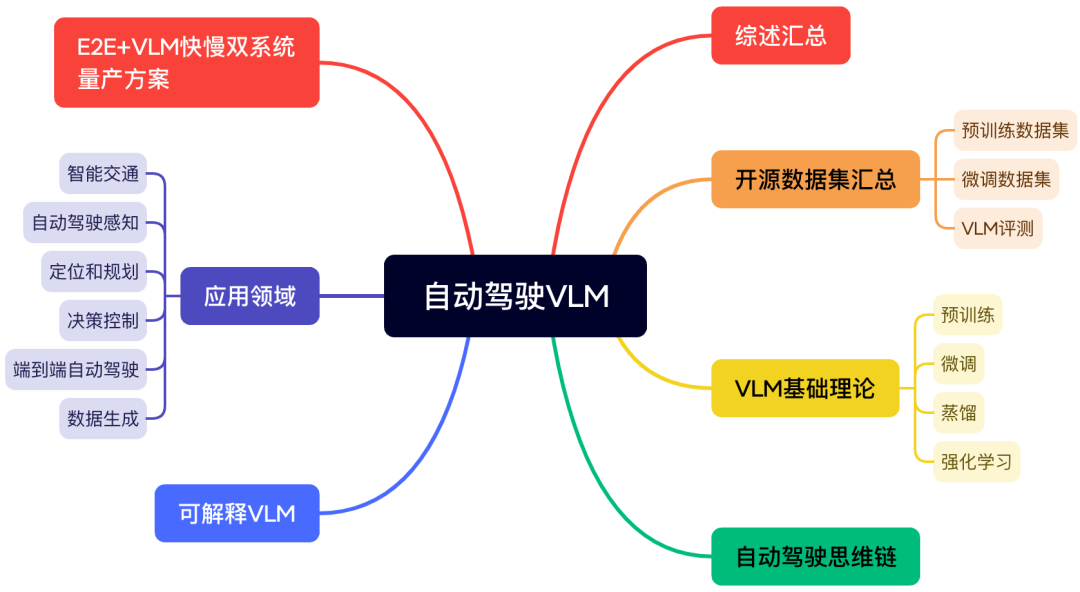
8)视觉语言模型(VLM)
我们汇总了自动驾驶VLM最新综述、开源数据集、思维链推理、量产方案快慢双系统DriveVLM等多项内容,让大家对这一前沿领域可以更深入的理解。
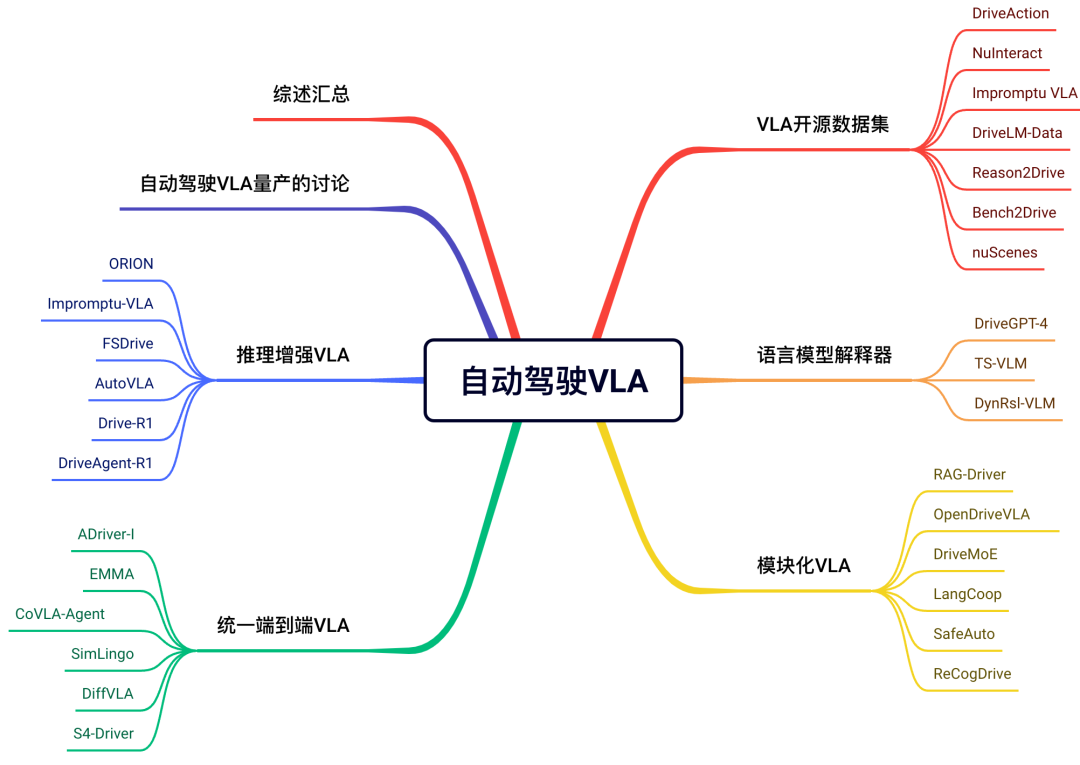
9)自动驾驶VLA
针对2025年最火的自动驾驶VLA,我们详细梳理了最新的综述、VLA开源数据集、作为语言解释器的相关算法、模块化VLA、端到端VLA和推理增强VLA,更有诸多关于VLA量产的讨论,在这里有你想知道的一切~
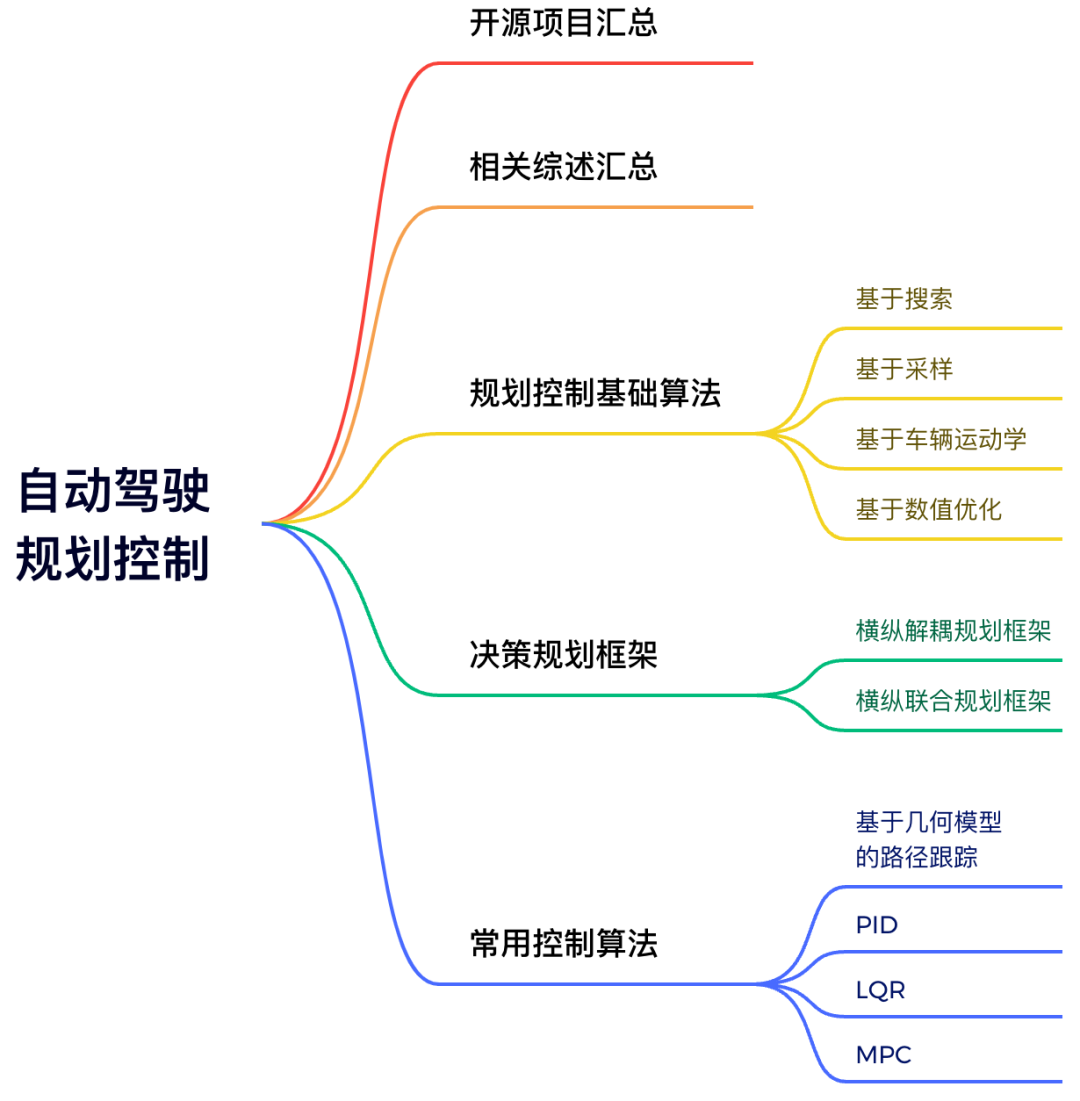
10)自动驾驶规划控制
星球内部汇总了传统规划内容的相关技术栈,包括但不限于规划控制基础算法、决策规划框架和常用控制算法。
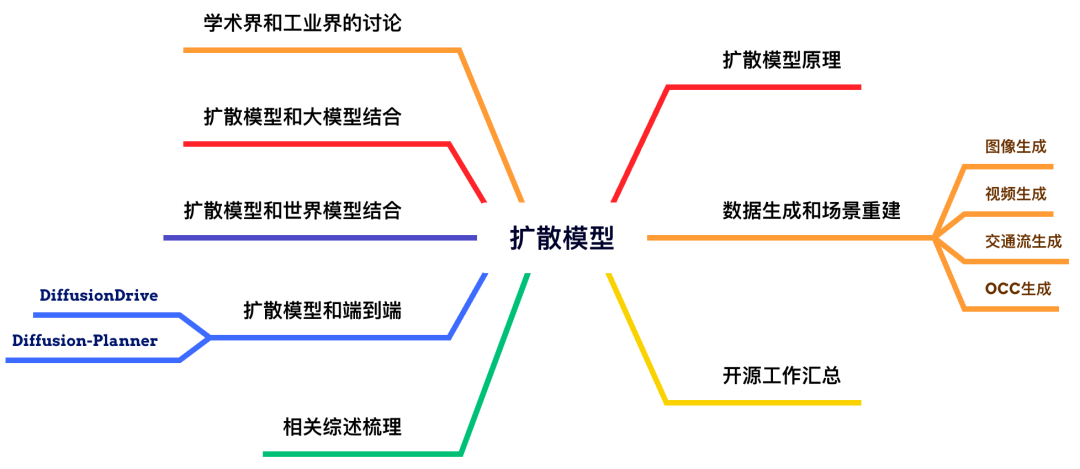
11)扩散模型
扩散模型作为当下的研究热点,星球内部也做了非常详细的梳理,从算法原理,到数据生成、场景重建、端到端、世界模型结合、大模型结合等等!
12)BEV感知
BEV感知作为当下量产的基石,星球内部做了非常成熟的梳理,纯视觉、多模态、多任务、激光雷达和相关数据集以及工程部署等等~

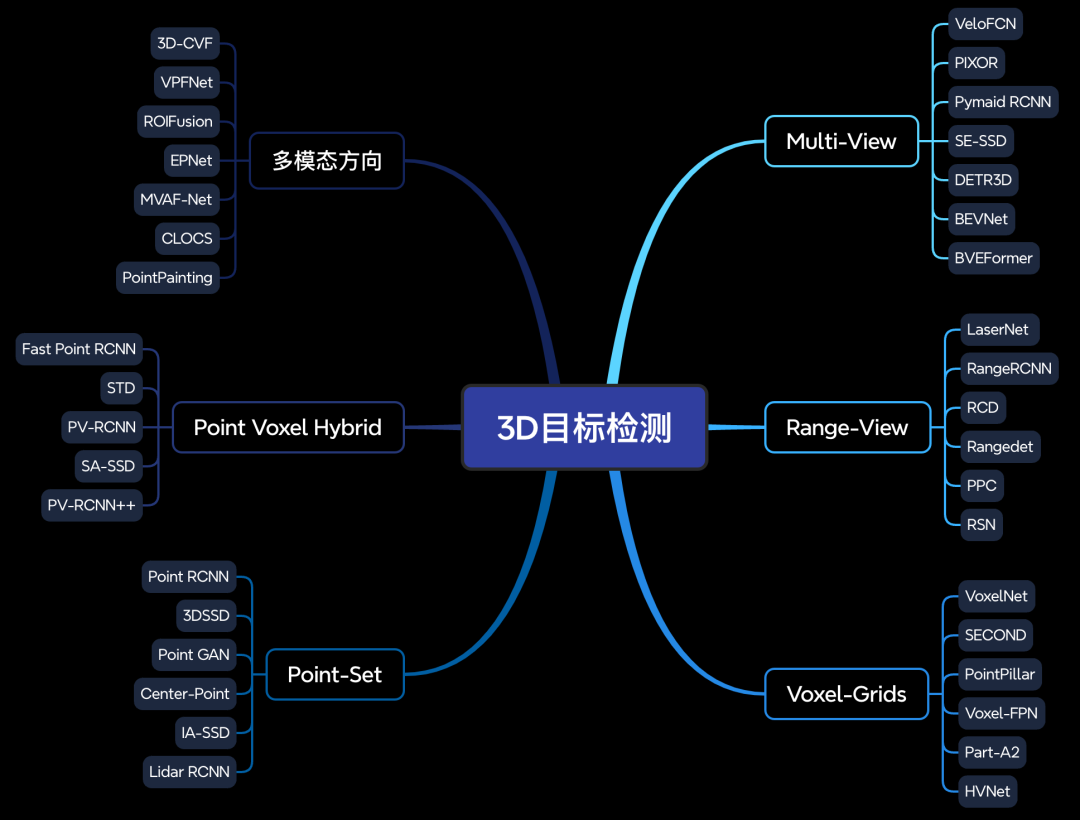
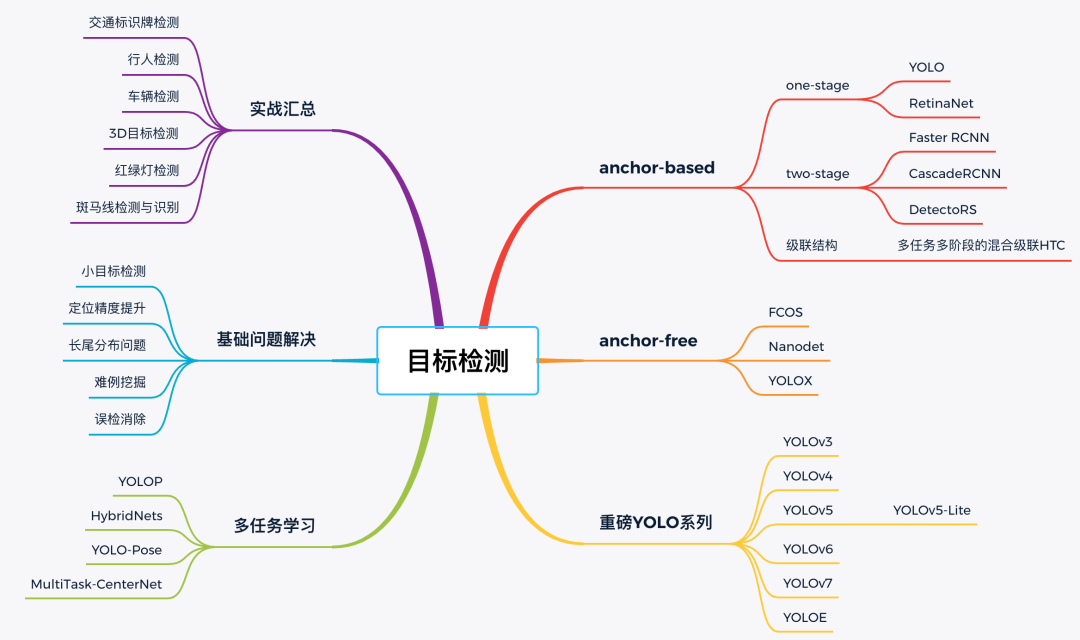
13)3D目标检测
针对3D目标检测领域,我们梳理了环视方法、range-view、基于voxel、Point及多模态方向。
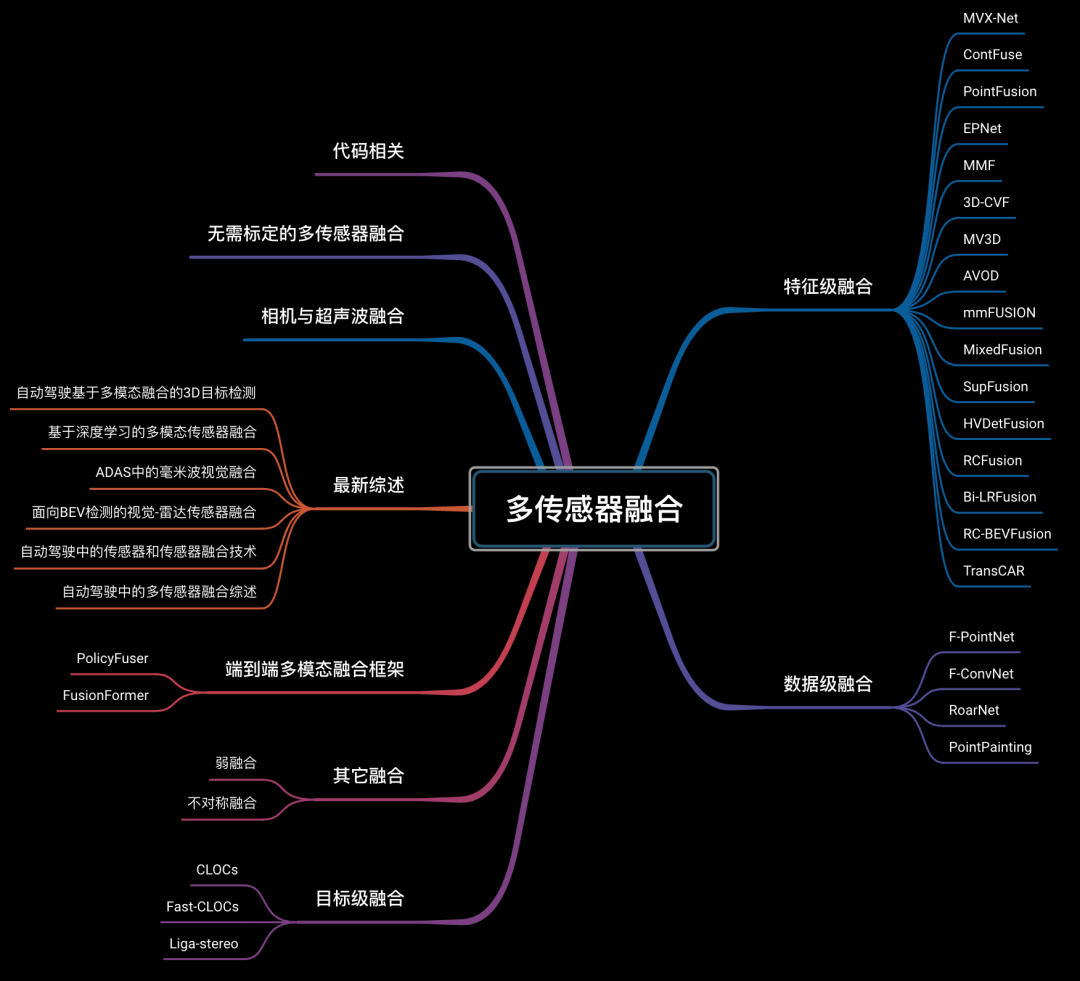
14)多传感器融合
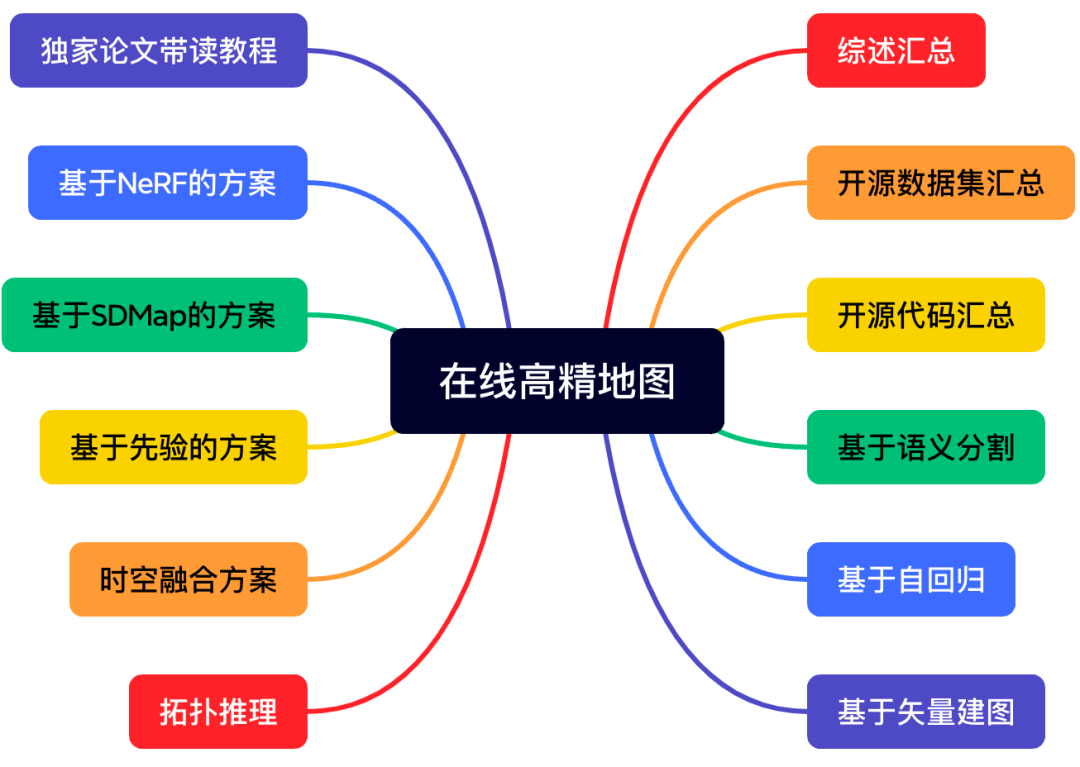
15)在线高精地图
在线高精地图是无图NOA量产方案的核心,星球详细梳理了近几年学术界和工业界关注最多的工作。
16)Occupancy Network

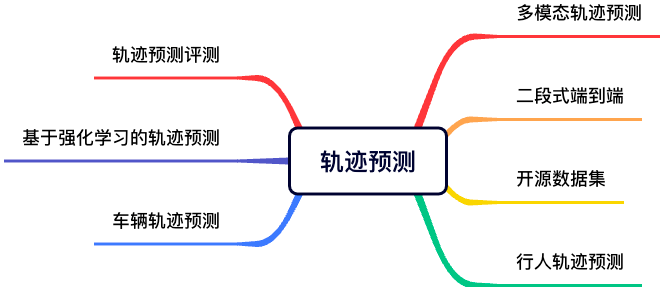
17)轨迹预测
18)自动驾驶-强化学习
强化学习是VLM必备的组件,星球内部梳理了强化学习理论、常用算法、优秀公开课、热门工作等等内容,一应俱全!

19)车道线检测

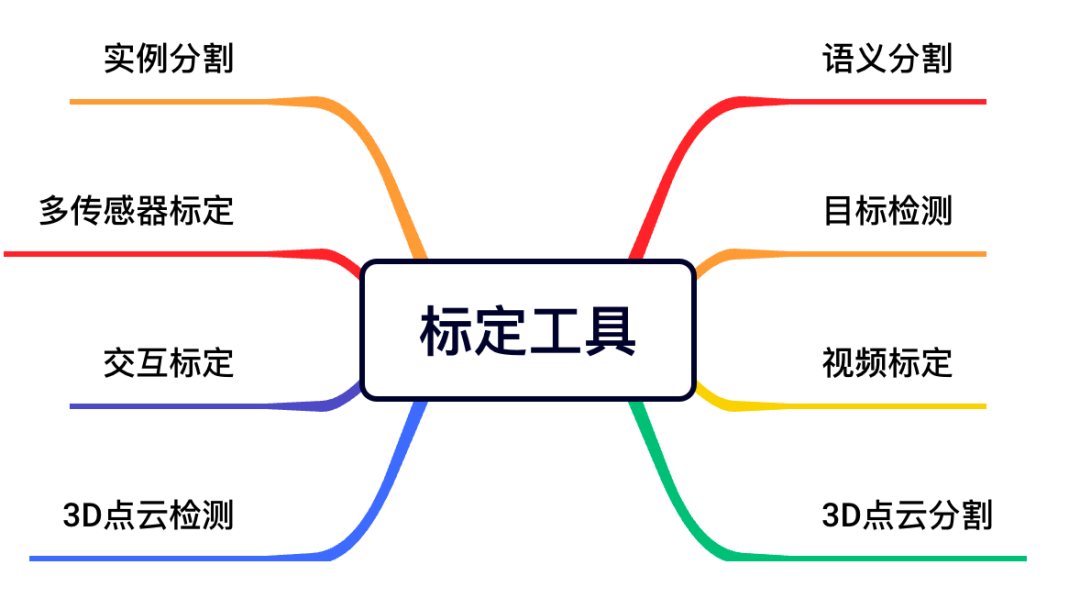
20)标定工具
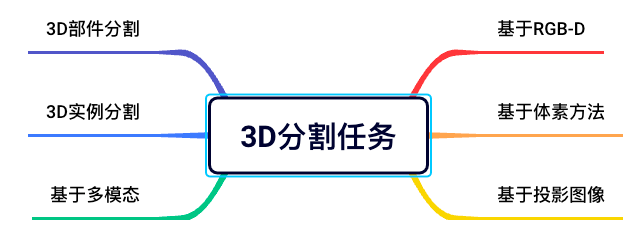
21)分割任务
22)CUDA与模型部署
23)模型部署实战
24)目标跟踪
25)2D目标检测
26)V2X

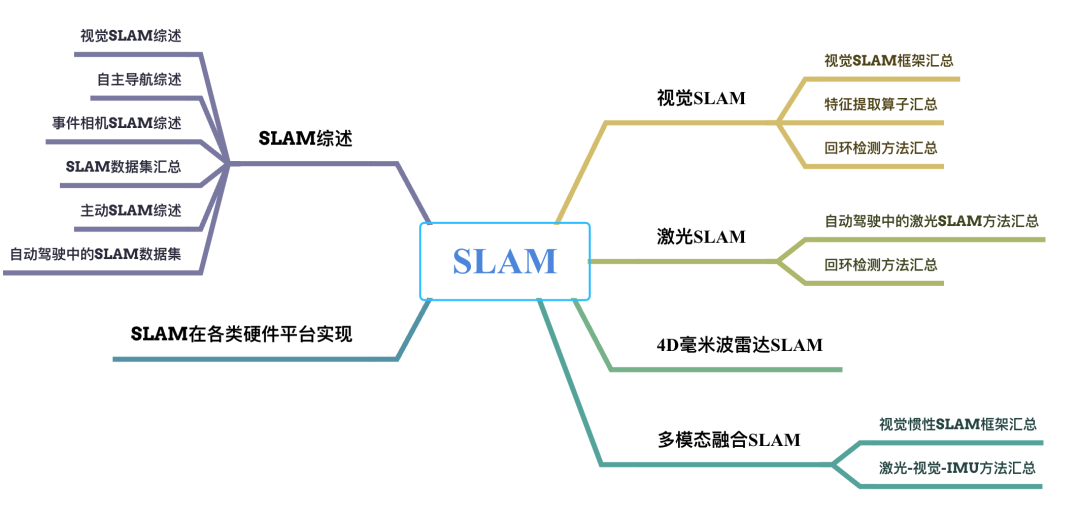
27)SLAM
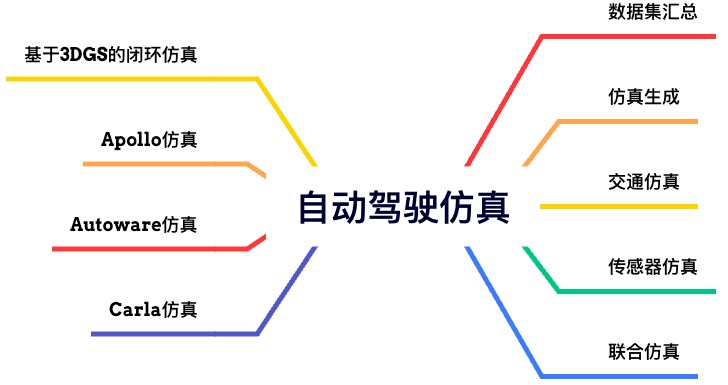
28)自动驾驶仿真
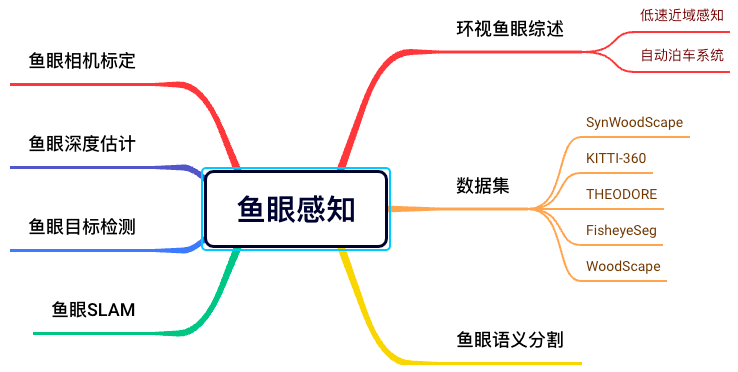
29)鱼眼感知
30)3D分割
31)大模型与自动驾驶

星球内部直播分享
星球内部不定期邀请行业大佬直播分享,直播内容可以反复观看,部分直播内容一览!目前已经超过一百场专业技术直播!!!

星球内部交流
星球成员可以在星球内部自由提问,无论是工作选择还是研究方向选择,都能得到解答~



扫码加入


















 5305
5305

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









