



作者 | Malignus 编辑 | 自动驾驶之心
原文链接:https://zhuanlan.zhihu.com/p/15362624581
点击下方卡片,关注“自动驾驶之心”公众号
戳我-> 领取自动驾驶近15个方向学习路线
本文只做学术分享,如有侵权,联系删文
许久没有更新了,自从开始工作以后愈发的困在了Corner Case和各种各样的琐事,闲言少叙,这篇文章将用尽可能简洁的语言,帮助各位大佬了解地平线的Sparse 4D系列工作。(PS:对于Sparse4D中,不同帧间的信息不再依赖各自帧内的ego2global部分就不做介绍了,大佬工作的代码写的很清晰,有这样一个概念即可~)
Summary
环视障碍物的检测,将不依赖显式的稠密BEV特征进行学习。
基于K-Means的初始化Anchor, 让模型拥有更快的收敛速度,且Query的可解释性更好
引入去噪过程,模型可更快收敛。
考虑3D检测特点,引入质量估计
以检测结果为基础,可出Tracking结果,不依赖BEV下的多目标追踪后处理
Methods
接下来,我们将分开两部分介绍模型结构部分;分开两部分的原因,是因为Denoising并不影响整体模型训练的pipeline,拆开两部分,可更好帮助各位大佬理解整体工作。
介绍模型整体的forward流程,包括Loss的设计
介绍Denoising的使用
Overall Pipeline
一言以蔽之:模型将基于query_based的instance_feature和anchor,进行整体的稀疏BEV感知;图像特征将不进行显式的深度信息编码,模型基于anchor的中心点,通过offset的学习,将图像特征引入至instance_feature。
接下来将基于开源的代码,进行尽可能简短的模型forward pipeline介绍。
instance_feature和anchor起始存储于instance_bank内。anchor(,11)的初始化,是基于GT的kmeans计算得到。对应的11维信息:[x,y,z,l,w,h,,,,,state]. 其中, 所有anchor的速度为0,yaw角为0,最后一维信息可不关注,仅与denoise相关。模型在训练过程中,anchor会伴随着模型的学习更新。但在每一个iter的forward开始,instance_bank内取到的初始化当前帧instance_feature都是全0(即instance_feature永远依赖于当前图像特征的提取,和后续的注意力计算)。
在通过Transformer进行forward过程中,operation主要包括:deformable, ffn, norm, refine, temp_interaction, interaction在内的六部分。其中,ffn, norm很好理解,重点介绍deformable, refine, temp_interaction, interaction四部分。
单帧decoder: deformable+FFN+Norm+Refine
多帧decoder: temp_interaction+interaction+norm+deformable+ffn+norm+Refine
模型整体包括两类decoder:
其中,Deformable模块负责将图像特征引入;Refine模块负责基于instance_feature获取感知结果;temp_interaction负责对当前帧特征信息与历史特征信息进行融合; interaction负责将当前帧特征进行自注意力计算。
deformable(图像特征引入):前面提到,Sparse4D中,模型将不在学习稠密的显式BEV特征。图像特征的使用主要依赖该module。该模块的作用,是将图像特征基于anchor和采样点,对instance_feature进行更新(即引入图像特征)。
deformable依赖的输入包括instance_feature, anchor, anchor_embed, feature_maps与projection_mat. 最终输出的结果将用于更新instance_feature.
instance_feature[B,,256]: 当前帧的instance feature, 模型在每一轮forward时,第一次进入deformable中的instance_feature结果都是全0,是通过若干次调用deformable module的过程中,图像特征的不断引入堆叠才得到最终的instance_feature.
anchor:[B,,11]当前帧的anchor,即可能会存在于当前帧的框体的位置和对应大小的预设。
anchor_embed:[B,,256]当前帧anchor对应的position_embedding。

图像特征引入模块的forward流程五步走:
获取key_points[B,,,3]:基于anchor_embed求解anchor中心点的对应位置偏移量,与anchor相加后得到key_points。此处的指代的是anchor中心点对应采样在图像中采样点的个数,论文中=8.
获取多尺度图像特征采样的权重weights[B,,,]:对已有的instance_feature分别引入框体的位置编码信息(anchor_embed)和相机参数的编码信息(基于ego2img的全连接层进行的编码信息). 并通过全连接层和softmax层,以及15%的随机掩码,得到weights。论文中=8,=8(的引入理解为multi-head attention就好)。
获取采样后的图像特征features[B,,,256]: 基于ego2img, 将key_points的点投影到图像特征中的归一化位置(在[0, 1]位置内)。通过grid_sample采样每个key_points在图像上的对应特征。对于采样点经ego2img投影后不在图像范围内的情况,对应features为0。

refine(基于instance_feature和anchor,基于全连接层得到感知结果):
整体输入依赖instance_feature, anchor与anchor_embed,最终的输出结果包括:经过refine后的anchor[B,,11],对应anchor的类别分类[B,,],质量分析(quality)[B,,2] (值范围在[0,1]区间内)
refine模块流程三步走:
基于已有instance_feature和对应的anchor位置编码信息相加, 得到instance_feature
instance_feature通过全连接层得到anchor的偏移量,相加后更新anchor。
quality, cls全连接层得到对应的质量结果和分类结果。
temp_interaction(基于当前帧特征和历史特征,进行交叉注意力学习):输入包括instance_feature(当前帧特征[B,,256]), temp_instance_feature(历史帧特征[B,,256]), 对应的位置编码信息anchor_embed&temp_anchor_embed。
interatcion(基于当前帧特征,进行自注意力学习):输入包括instance_feature(当前帧特征[B,,256])。对应位置编码信息anchor_embed
历史特征(temp_instance_feature),历史anchor(temp_anchor)及当前帧anchor、当前帧特征的获取(get),是从instance_bank内获取,在Det_head每一轮forward的起始去做,获取的过程中,会基于历史特征和当前帧特征的时间间隔,进行mask判断;历史帧的anchor会基于ego2global信息进行基础的运动补偿,统一至当前帧下。
基于历史特征,历史anchor和当前帧的anchor,当前帧的特征及对应confidence对当前帧特征和anchor的更新,是在模型经过单帧decoder forward后进行的,是通过concat当前帧的top与历史帧的得到。即instance_feature在基于采样点引入对应图像特征后,选取对应topk的当前帧特征,与历史帧特征融合,作为新的instance_feature&anchor,随后进行多帧decoder的forward。
基于完整forward后instance_feature, anchor及对应的confidence,对instance_bank内的特征进行更新。选择confidence最高的top作为新的历史特征(temp_instance_feature)和历史anchor(temp_anchor)。
Loss
Loss部分将仅针对Quality部分进行讲解
cns_target: 预测与真值在x,y,z上面的l2距离误差:dist,最小值为0,最大值为无穷,所对应的,值域为(0, 1].即误差越大,对应值越接近0。
yns_target: 预测与真值在sin(yaw)和cos(yaw)的余弦相似度,若相似度大于0,yns_target为1.0,反之为0。反映的是预测与真值在yaw角的预测上是否可保证是在同一方向上。
模型输出的cns和yns与对应target进行loss计算,其中cns用交叉熵损失计算,yns用高斯focal loss计算
个人理解,该部分的loss学习,本质上是强调模型对于目标障碍物的中心点(特别是深度)和yaw角的预测,因为本质上对于图像进行3D检测的ill-posed问题,yaw角和深度的预测就是最关键,最难的问题。(个人也有一些瞎想,即现有的learning-based prediction&planning, 也在强调在一味的模仿学习基础上,要学习人类的判别逻辑/或提供奖励函数等等;此处的quality是否也可作此理解呢?)
Denoising
一言以蔽之:Denoising中在loss计算部分,与正常anchor的loss计算一摸一样;Denoising的作用,在于绕过了匈牙利匹配,在去噪的过程中,直接优化检测头。李峰:[CVPR 2022 Oral]DN-DETR: 去噪训练加速DETR收敛 评论区大佬的这个解释让我茅塞顿开
其实detection任务可以类比成image domain到box domain的机器翻译问题。自然语言的翻译问题通常需要在两种语言上都有预训练才能work的比较好。ImageNet预训练的backbone使得我们有了很好的image domain预训练模型,但box domain我们是没有预训练模型的,只能利用image-box pair在训练过程中强行拟合。本文利用GT生成的noisy query更像是在box domain构造了一个自监督task,有效地缓解了box domain没有预训练模型的问题。类似思路在Pix2seq中也有体现。
Denoising部分只在训练过程中引入,并不会影响模型的infer阶段
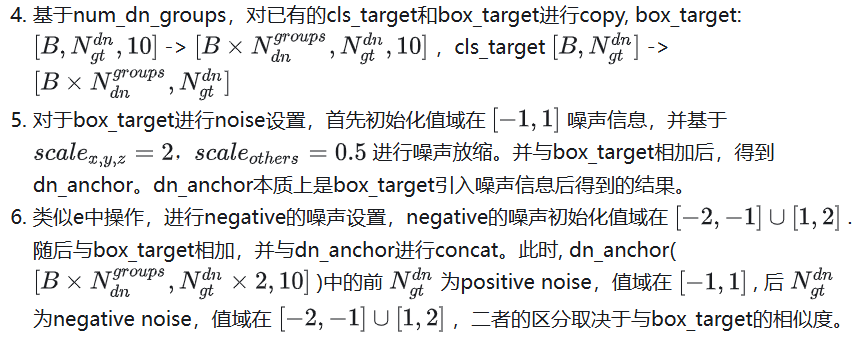
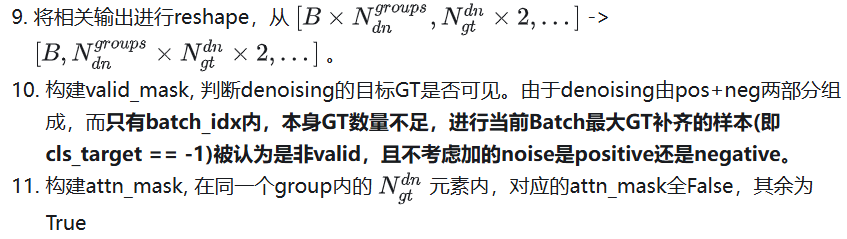
获取denoising的相关信息,
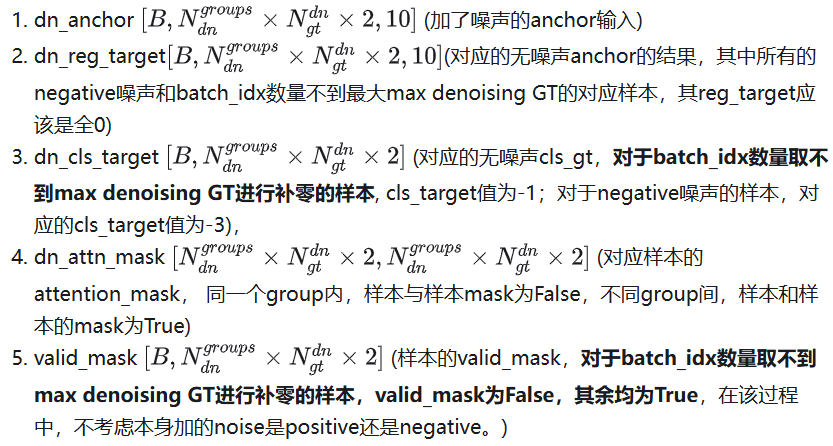
最终得到的输出包括:
Forward pipeline
设置了max denoising GT=24,如果当前batch_idx下的GT中周边障碍物数量大于该数量,则取前24个,否则取全量的GT。获取的GT信息包括分类信息和对应的框体信息(x,y,z,l,w,h,yaw,vx,vy)。
统计当前batch_size中最多的GT数量,上限为max denoising_GT的数量。
对cls_target和box_target中,batch_idx中不足最大GT数量的样本进行补齐。其中,cls_target补-1, box_target进行对应的全零补齐。
求解box_cost,对应得到每一个加入噪声后的dn_anchor, 其去噪后最接近的box_target。
基于box_cost得到的匈牙利匹配结果,构建dn_box_target和dn_cls_target。其中,positive的部分由于添加的噪声较小,对应的target就是GT的cls_target和box_target,而negative部分,对应的box_target为全0,cls_target为全部-3。
原有的anchor中包括的11维的输入,其中最后一维本身是没用的,可能是作为dn_anchor和anchor的区分位置
dn_anchor补齐最后一维的shape,最后一个remain_state_dim为0。并与anchor进行concat。此时的anchor_shape,为 [B,N]
构建attn_mask, 在计算自注意力机制时,对不同的query之间的attention进行mask。最终的目的,在于正常的query进行进行self_attention时,不会看到各个group的denoising query信息(防止GT信息泄漏)。同时各个denoising query在进行self_attention计算时,也不会看到正常的query和其他group的query信息(防止one-to-one的assignment,变成了n to one)。此处的信息泄露,是指denoising_query中的信息,是在GT基础上加小幅度扰动得到的,把近乎百分之百准确的投影点投回到图像中拿的query肯定很准,用这样的信息给原有的query看到属于泄题,会完全影响模型学习。
Thinking
个人在初次读完Sparse4D的系列工作,第一感觉是好屌,而且代码的工程量开发好大。但后续再阅读了DAB-DETR,DN-DETR和DINO在内的三篇工作后,发现Sparse4D的系列工作更多是踩在巨人的肩膀上,进一步完善了环视障碍物的BEV检测任务。在这里也推荐作者本人在知乎进行的论文分享~李峰:DINO: 让目标检测拥抱Transformer 李峰:[CVPR 2022 Oral]DN-DETR: 去噪训练加速DETR收敛
有一些美中不足的地方和可能可以去改进的点,一方面在于,由于没有显式的深度信息学习,导致基于anchor的中心及对应offset往回投影学习图像特征时,无法考虑到目标车辆部分被前车遮挡的情况。能想到的一些解决思路,是通过GT提供分割结果,一定程度上约束图像特征投影点学的是统一的instance。
碎碎念
由于自己的懒惰,导致大半年的时间长期没有进行认真系统的论文阅读。在读Sparse4D的工作时,需要结合开源的代码逐行阅读,一点一点厘清思路。但当最近系统化的再次阅读了DETR系列的相关工作,会发现Sparse4D更多的是站在了巨人的肩膀上,将BEV障碍物检测的性能再次拔高了一个台阶。
年底了,在这里也立个小flag,尽量保证至少两周一次的更新频率维护我的论文分享,也希望各位大佬不吝指正赐教。个人能力有限,很多分享难免会有纰漏,也欢迎各位大佬进行指正
① 2025中国国际新能源技术展会
自动驾驶之心联合主办中国国际新能源汽车技术、零部件及服务展会。展会将于2025年2月21日至24日在北京新国展二期举行,展览面积达到2万平方米,预计吸引来自世界各地的400多家参展商和2万名专业观众。作为新能源汽车领域的专业展,它将全面展示新能源汽车行业的最新成果和发展趋势,同期围绕个各关键板块举办论坛,欢迎报名参加。

② 国内首个自动驾驶学习社区
『自动驾驶之心知识星球』近4000人的交流社区,已得到大多数自动驾驶公司的认可!涉及30+自动驾驶技术栈学习路线,从0到一带你入门自动驾驶感知(端到端自动驾驶、世界模型、仿真闭环、2D/3D检测、语义分割、车道线、BEV感知、Occupancy、多传感器融合、多传感器标定、目标跟踪)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、大模型,更有行业动态和岗位发布!欢迎扫描加入

③全网独家视频课程
端到端自动驾驶、仿真测试、自动驾驶C++、BEV感知、BEV模型部署、BEV目标跟踪、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、车道线检测、轨迹预测、在线高精地图、世界模型、点云3D目标检测、目标跟踪、Occupancy、CUDA与TensorRT模型部署、大模型与自动驾驶、NeRF、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频(扫码即可学习)

④【自动驾驶之心】全平台矩阵



















 477
477

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









