



具身智能不再是一句空话...
具身智能广义上是指具有物理身体的智能体,能够与环境进行互动,感知周围世界,自主学习、决策并执行任务。说到这里,像人形机器人、四足机器人、机械臂系统、自动驾驶系统算广义上的具身智能,能够感知周围环境并作出反应或执行。GPT这类大模型从狭义上理解,当然也可以算。如果再来看工业界的产品落地,扫地机也是,只是没有那么智能罢了!
无论是特斯拉的擎天柱,抑或波士顿动力的大狗or大牛,都在解决一个事情,那就是通用人工智能。行业期望双足机器人能够类人工作劳动,比如产线机器人、陪伴机器人、服务机器人等;期望多足机器人能够完成搬运、巡检、救援等工作,将人类从无趣或危险的场景中解救出来,减少人力成本。
具身智能开始备受青睐
依托于AI技术的快速发展,以及各类芯片的算力提升。硬件、数据和算法相比于之前纯机器人时代已经有着大幅度提升,更多智能的技术可以快速应用到具身领域,比如自动驾驶领域的端到端、感知、规划等,大模型技术、SLAM这类建图定位、位姿估计、机械臂动力学等等。
如何将多类领先的技术和物理实体结合,是很多顶尖科研机构和机器人AI公司一直在突破的。国外有波士顿动力、特斯拉擎天柱这类具有代表性的四足和人形机器人;国内像宇树科技、云深处、智元机器人、还有各大厂的机器人实验室都在不断攻克难关,期望能够推动社会的生产变革。

软件算法与硬件都具备较高的感知和实时能力,资本自然也非常看好,可以说具身的市场绝不亚于那时的自动驾驶,相关的融资事件与岗位招募逐渐拉升,前景满满,也促使了相当多的从业者转向具身智能。
具身智能知识星球
具身智能之心知识星球是国内首个具身智能开发者社区,也是目前该领域最大的知识付费社区,已经近800人啦!创建的出发点是给大家提供一个具身相关的技术交流平台。星球内部主要关注具身智能相关的数据集、开源项目、 具身仿真平台、大模型、视觉语言模型、强化学习、具身智能感知定位、机器臂抓取、姿态估计、策略 学习、轮式+机械臂、双足机器人、四足机器人、大模型部署、端到端、规划控制等方向。
我们为大家汇总了近40+开源项目、近60+具身智能相关数据集、行业主流具身仿真平台、强化学习全栈学习路线、具身智能感知学习路线、具身智能交互学习路线、视觉语言导航学习路线、触觉感知学习路线、多模态大模型学理解学习路线、多模态大模型学生成学习路线、大模型与机器人应用、机械臂抓取位姿估计学习路线、机械臂的策略学习路线、双足与四足机器人开源方案、具身智能与大模型部署等方向,涉及当前具身所有主流方向。
切记,学习不要单打独斗,有更多人一起学习会更好。
为了促进行业的发展,我们前期希望更多优秀的人加入我们,邀请各位在未来5-10年和我们一起输出相关技术与行业最新干货,欢迎微信扫码关注。

加入星球有哪些福利?
第一时间掌握具身智能相关的学术进展、工业落地应用;
和行业大佬一起交流工作与求职相关的问题;
优良的学习交流环境,能结识更多同行业的伙伴;
具身智能相关工作岗位推荐,第一时间对接企业;
行业机会挖掘,投资与项目对接
星球内容一览
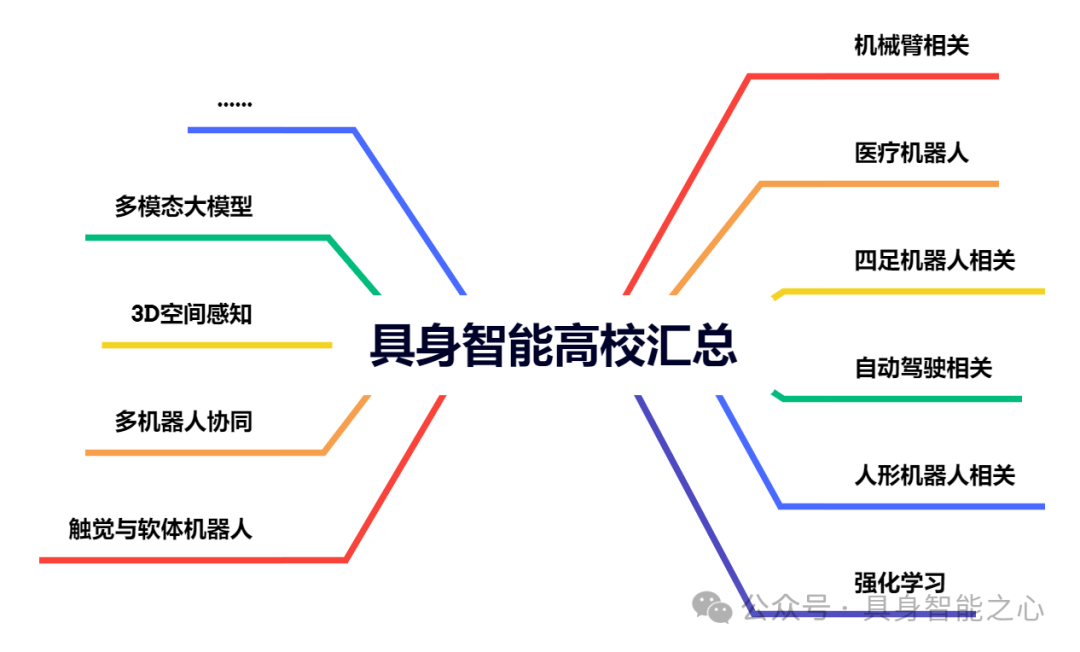
0)国内外具身智能高校汇总
星球内部为大家汇总了具身智能多个研究方向的国内外知名实验室,供大家后期读研、申博、博后参考。
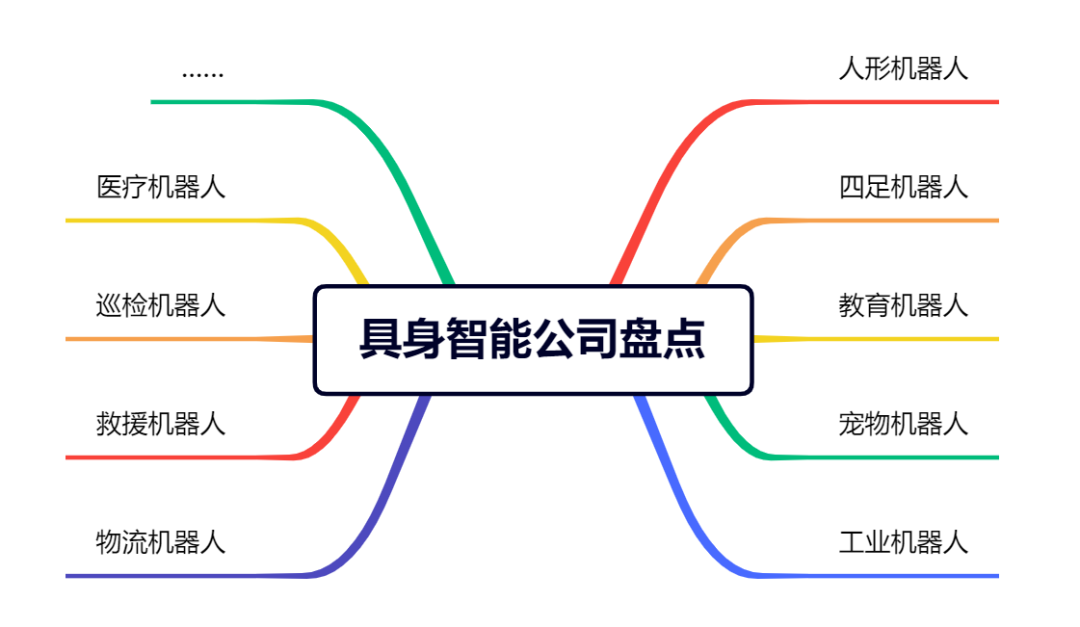
1)国内外具身智能公司汇总
星球内部为大家汇总了各类国内外各类具身相关机器人公司,涉及教育、宠物、工业、救援、物流、交互、医疗等方向。
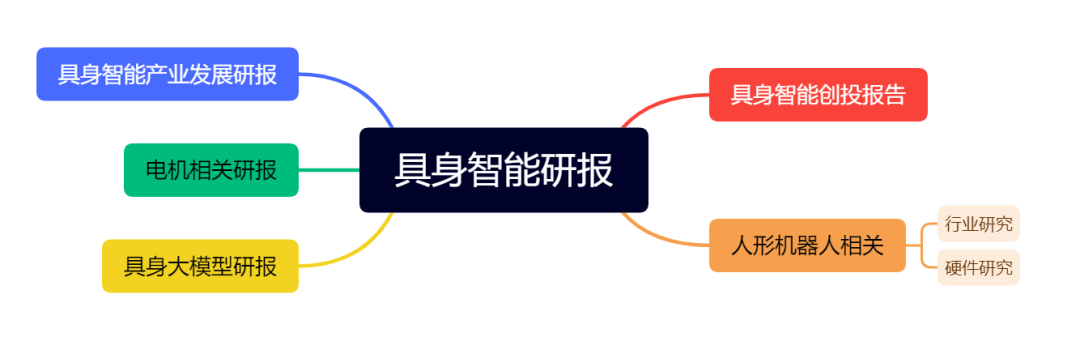
2)具身智能研报汇总
星球内部为大家汇总了大模型、人形机器人等行业相关的研报,第一时间了解行业的发展与工业的落地情况。
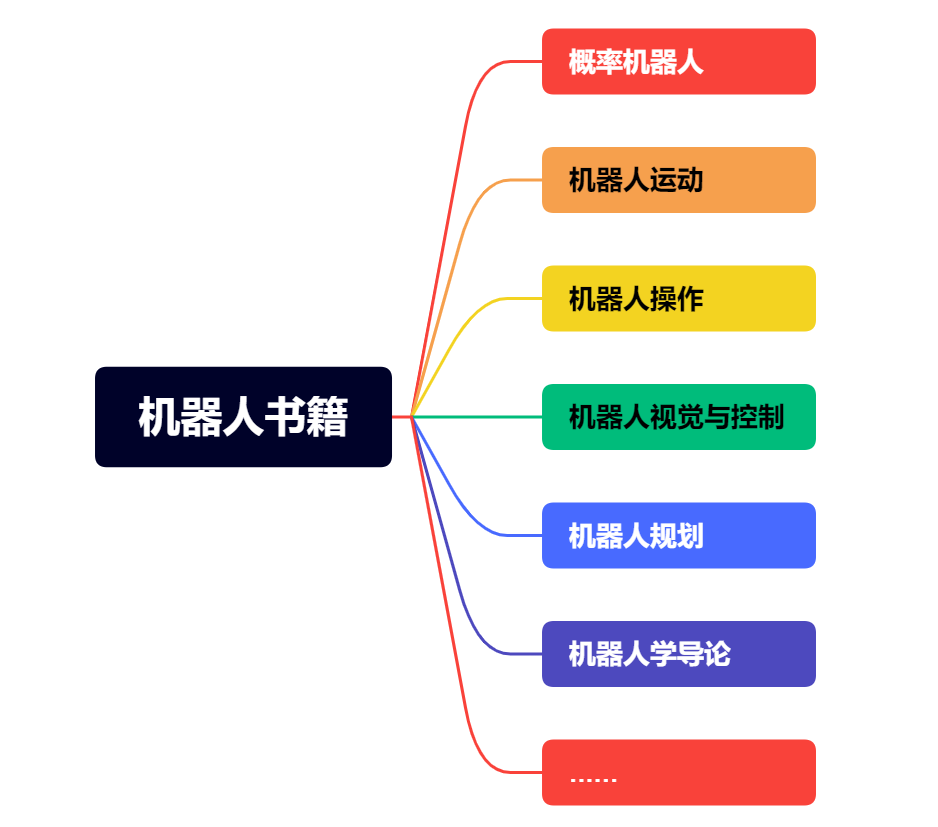
3)机器人相关书籍汇总
星球内部汇总了机器人导航、概率机器人、机器人动力学与运动学、路径规划、机器人视觉控制等多个方向的PDF书籍,供大家做基础学习。
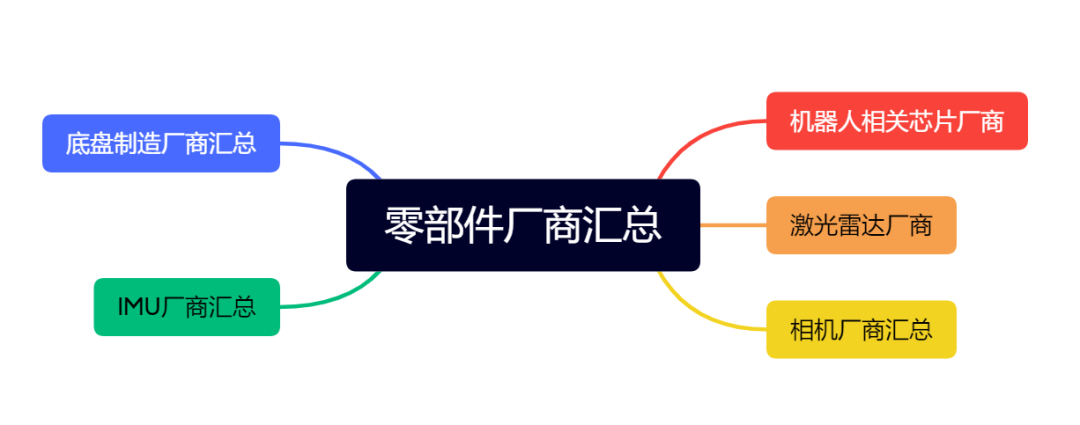
4)具身智能零部件品牌汇总
我们内部为大家汇总了机器人行业知名的零部件制造厂商,涉及芯片、激光雷达、相机、IMU、底盘等。
5)开源项目汇总
星球内部针对机器人仿真项目、机器人抓取、机器人控制、具身交互、具身感知等多个领域的开源项目进行了汇总,助力快速上手。

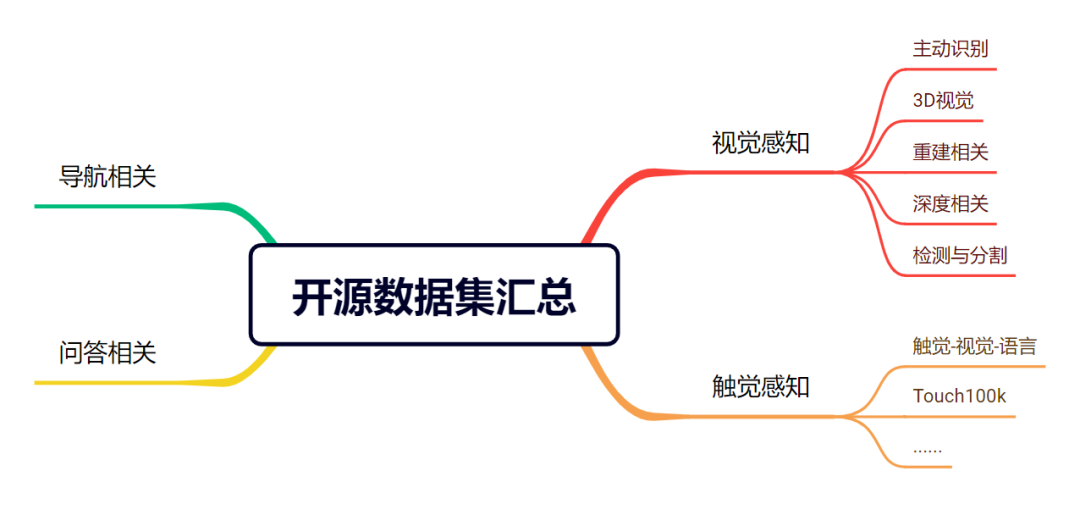
6)具身智能数据集
针对具身感知、触觉感知、导航、问答、大模型、视觉语言模型、端到端、机械臂抓取、控制规划多个领域的开源数据集进行了汇总,再也不用担心找不到可用的数据集了。
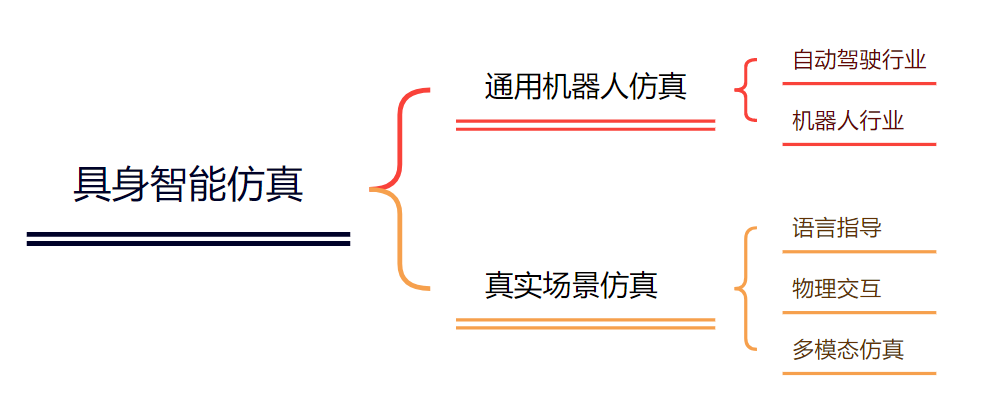
7)具身智能仿真平台汇总
星球内部针对通用机器人仿真平台和真实场景仿真平台进行了汇总,机器人仿真这里全都有!
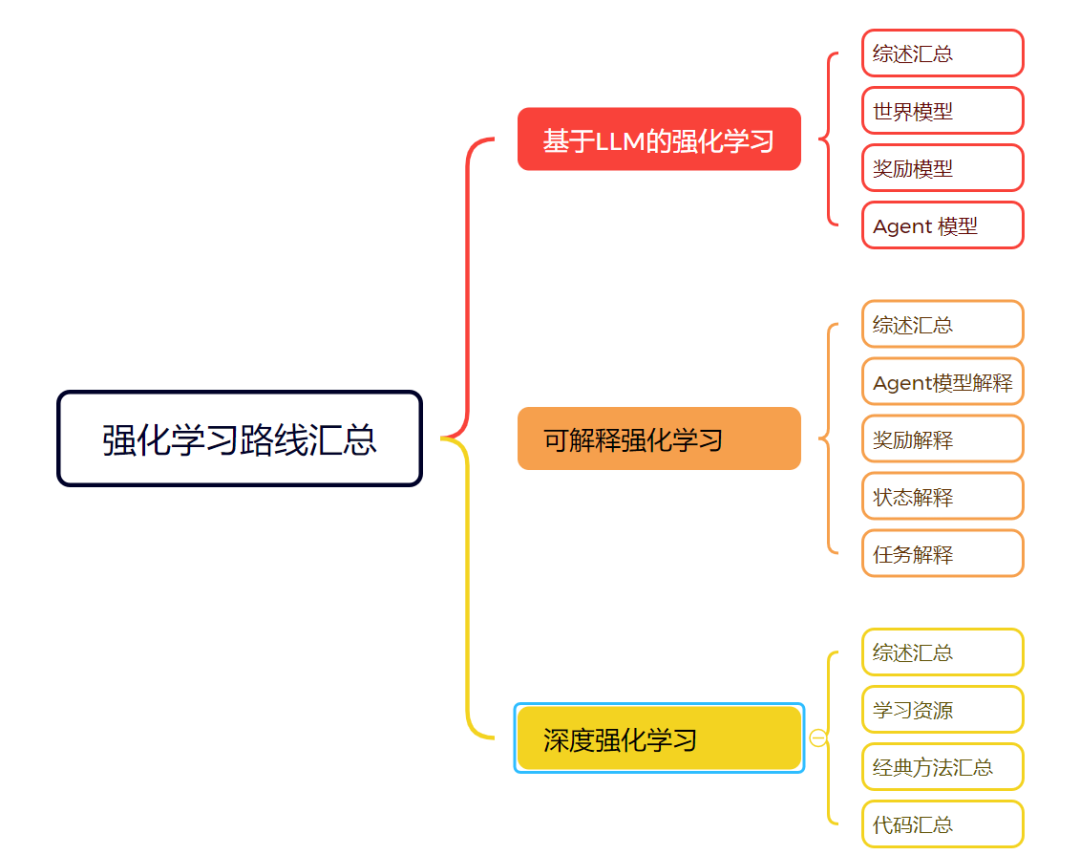
8)强化学习路线汇总
我们为大家汇总了基于LLM的强化学习、可解释强化学习、深度强化学习主流方案,一览各个子领域的应用训练。
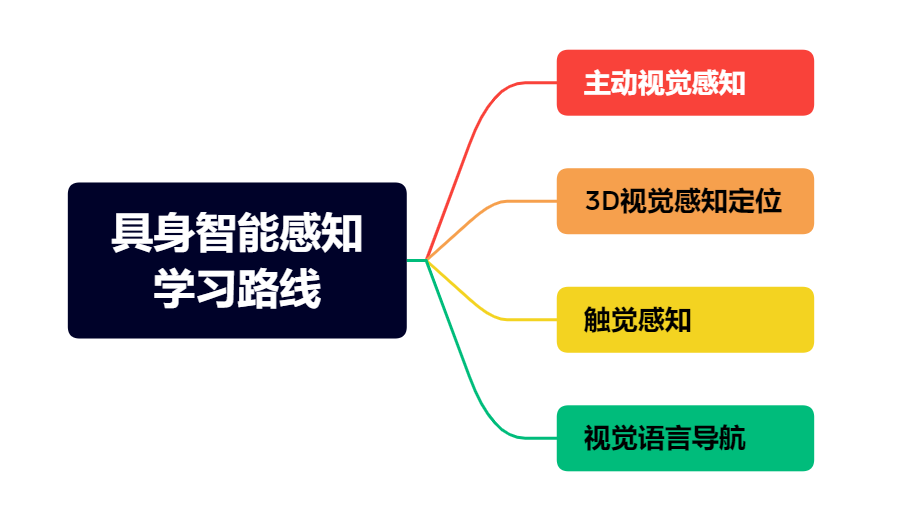
9)具身智能感知学习路线
内部针对主动视觉感知、3D视觉感知定位、视觉语言导航、触觉感知等多个任务进行了汇总,具身感知路线,一网打尽。
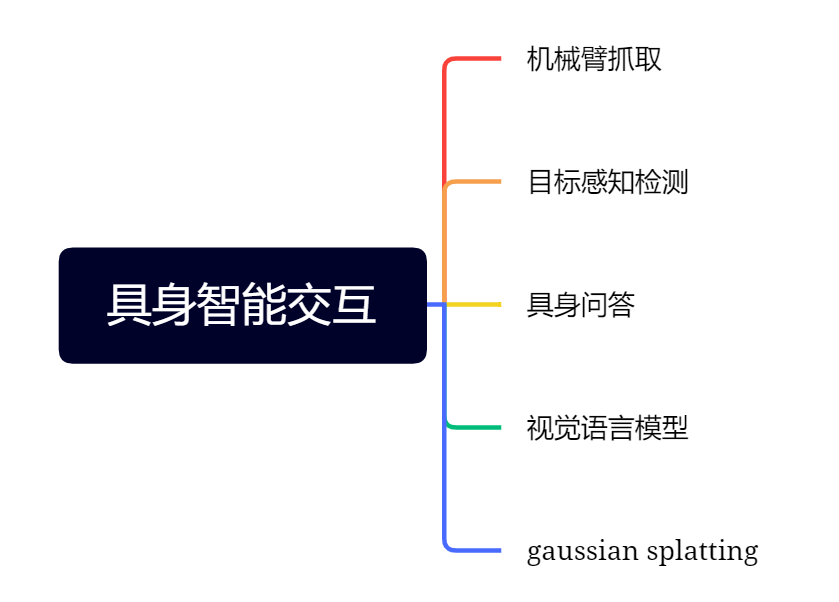
10)具身智能交互
星球内部为大家汇总了具身智能与环境交互相关工作,涉及抓取、检测、视觉语言模型、具身问答、gaussian splatting等多块内容。
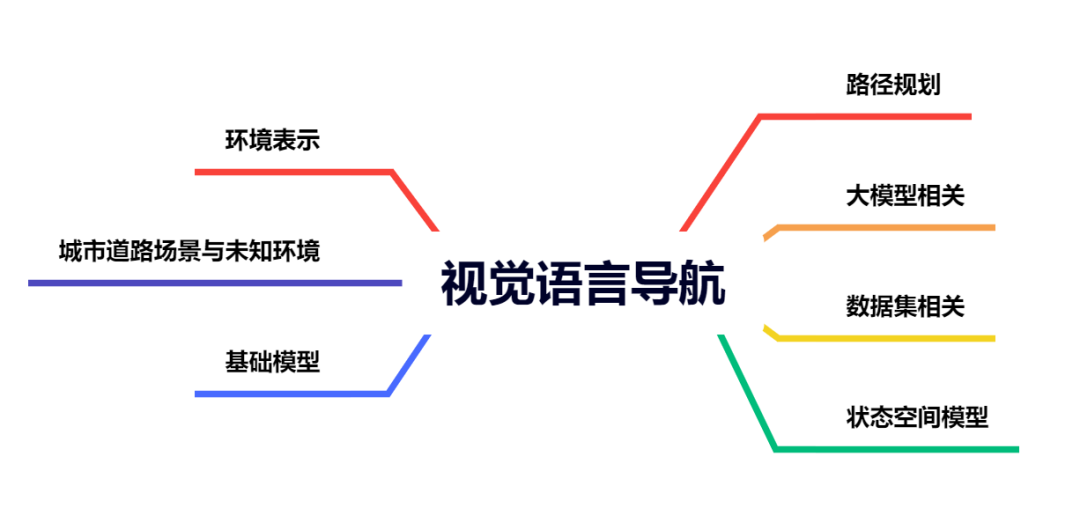
11)视觉语言导航
针对视觉语言导航、规划等多个应用内容,星球内部进行了详细的汇总,关注自动驾驶与机器人应用。
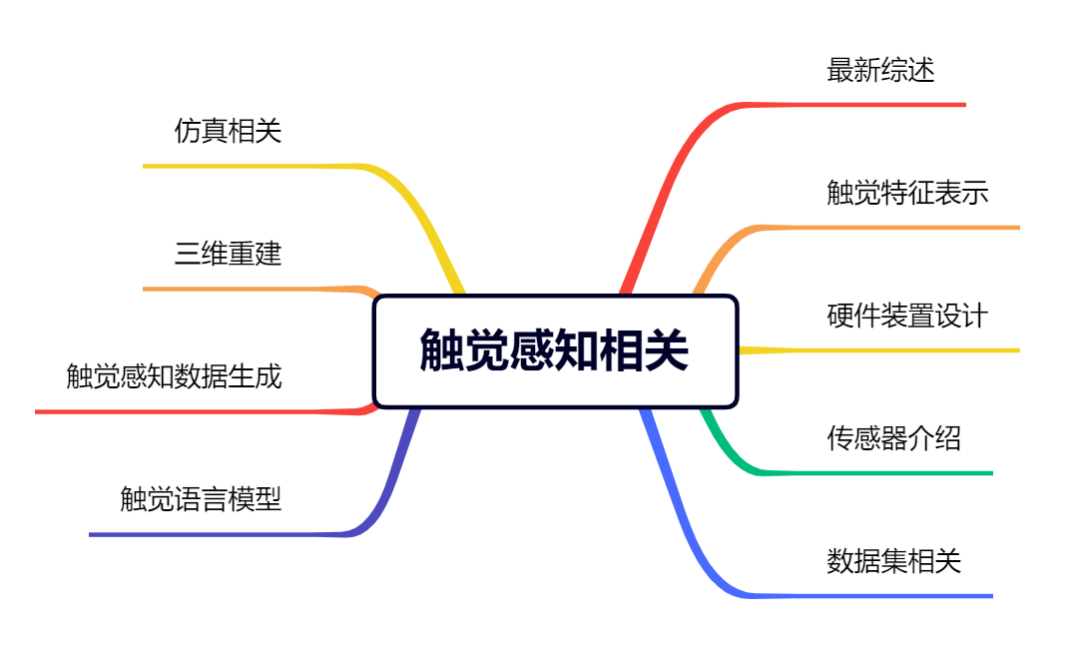
12)触觉感知
我们汇总了触觉感知最新综述、传感器应用、多模态算法集成、数据集等多项内容,让大家对这一前沿应用有着深刻了解。
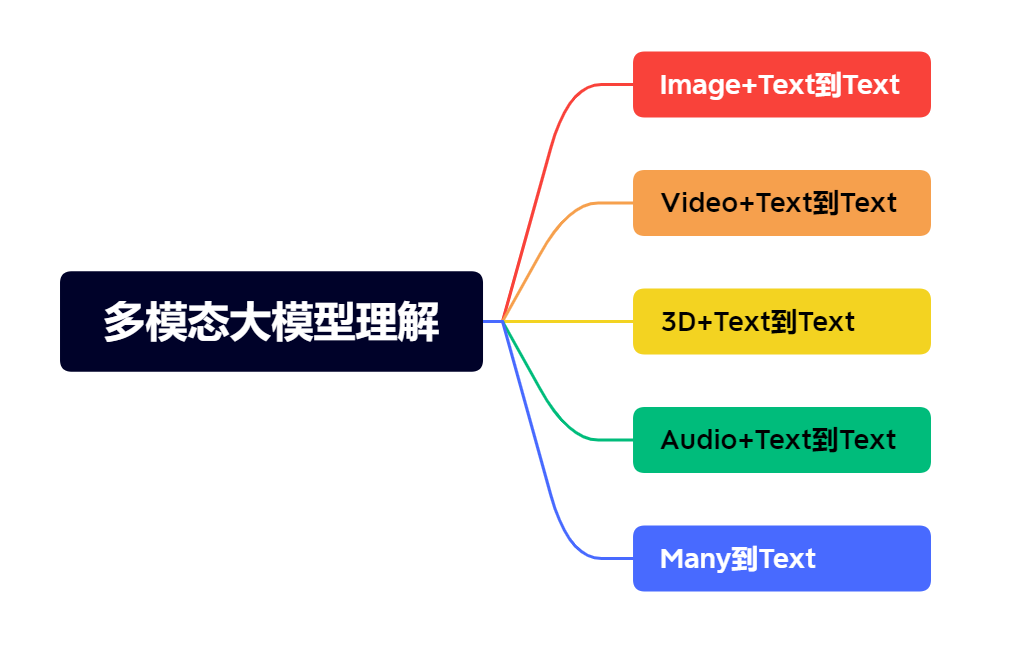
13)多模态大模型理解
星球内部汇总了大量多模态大模型理解相关内容, 包括但不限于Image+Text到Text、 Video+Text到Text、 Audio+Text到Text、 3D+Text到Text、Many到Text等。
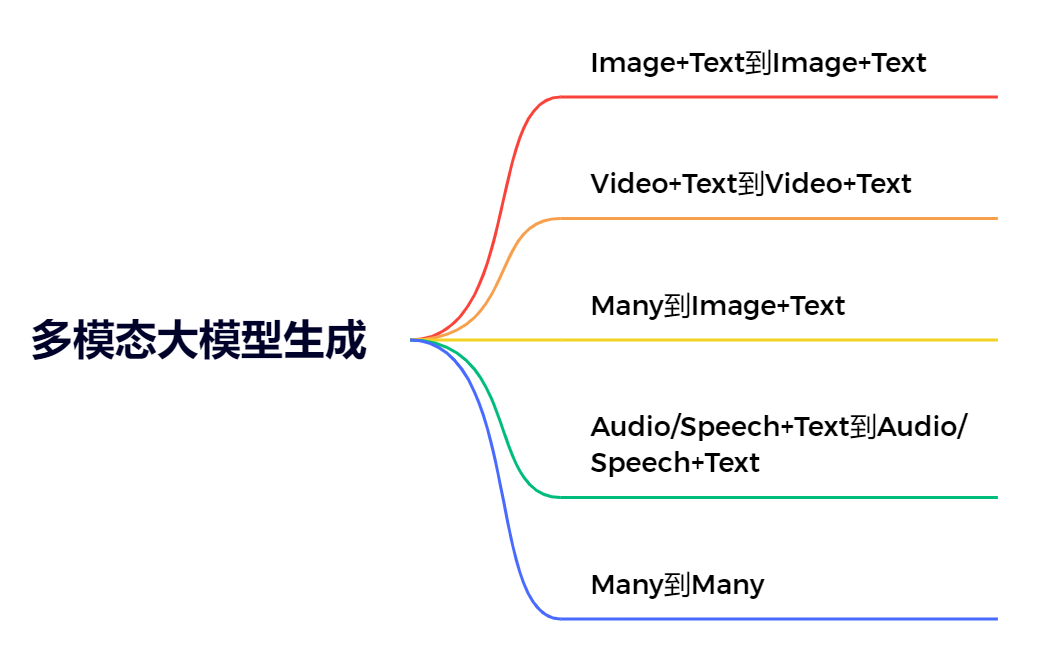
14)多模态大模型生成
除了多模态大模型理解,星球内部也汇总了大量多模态大模型生成相关内容,包括Image+Text到Image+Text、Video+Text到Video+Text、 Audio/Speech+Text到Audio/Speech+Text、Many到Image+Text、Many到Many等。
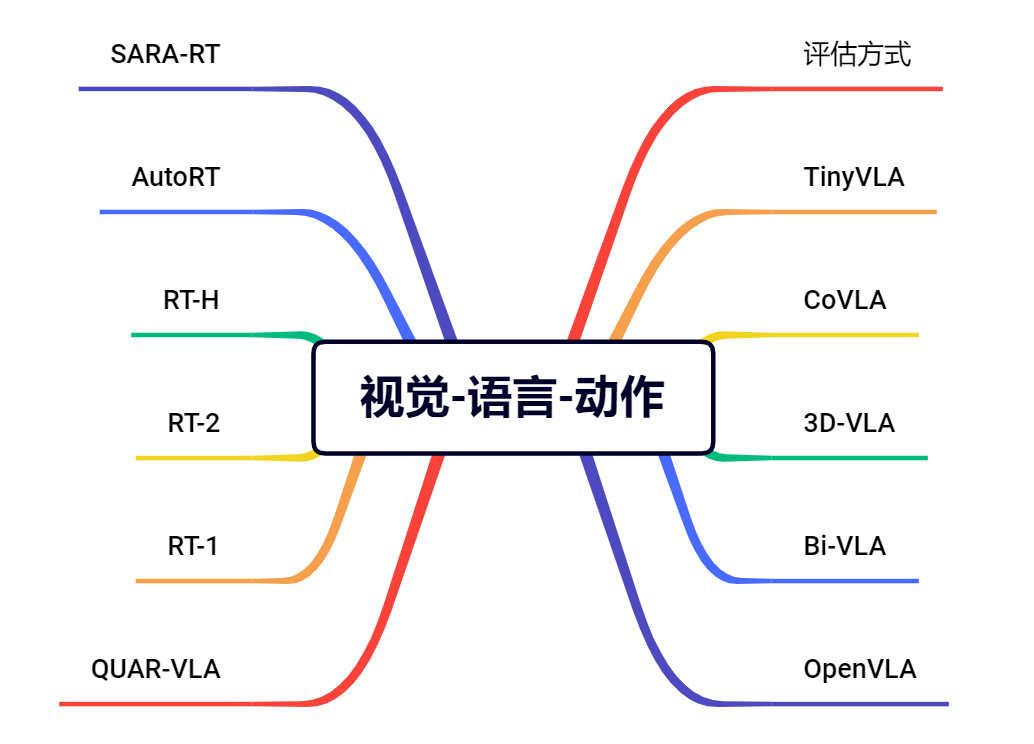
15)视觉-语言-动作
内部为大家汇总了主流的VLA模型相关内容,一览最新视觉-语言-动作相关进展。
16)大模型微调与量化推理
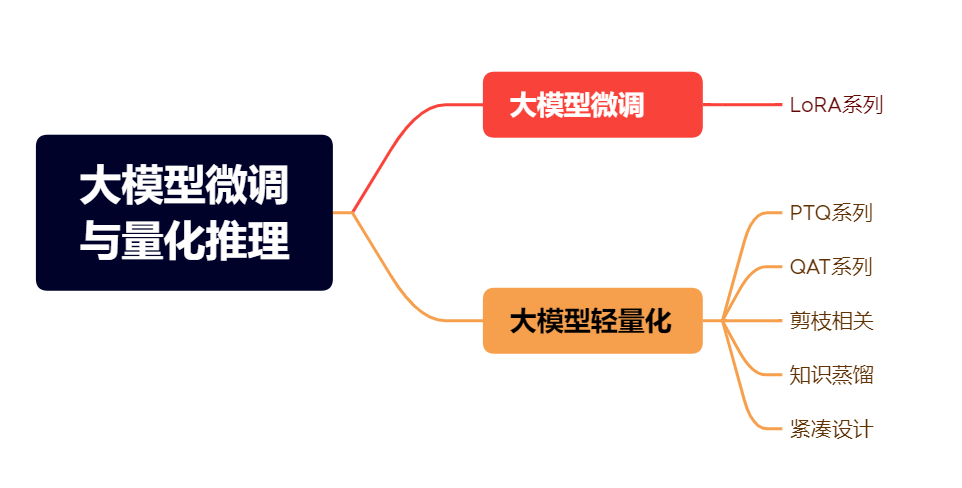
17)大模型部署相关
针对大模型部署框架、大模型轻量化方法等进行了汇总,助力落地。
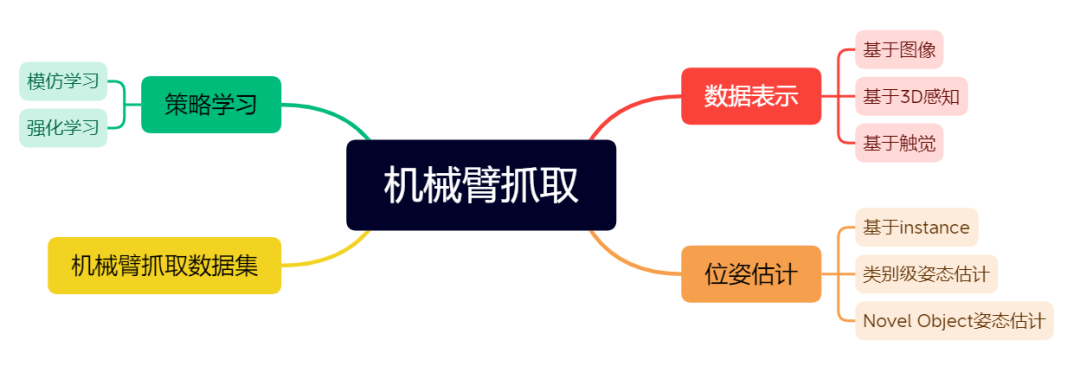
18)机械臂抓取
针对机械臂抓取、任务数据表示、位姿估计、策略学习多个部分展开了汇总。
19)双足与四足机器人
星球内部对开源的双足与四足机器人项目、仿真、源码、硬件等部分进行了详细的汇总,助力从零搭建你的机器人。

20)四足/轮式+机械臂
针对常用的移动+执行硬件方案进行了汇总,助力大家快速搭建属于自己的系统。
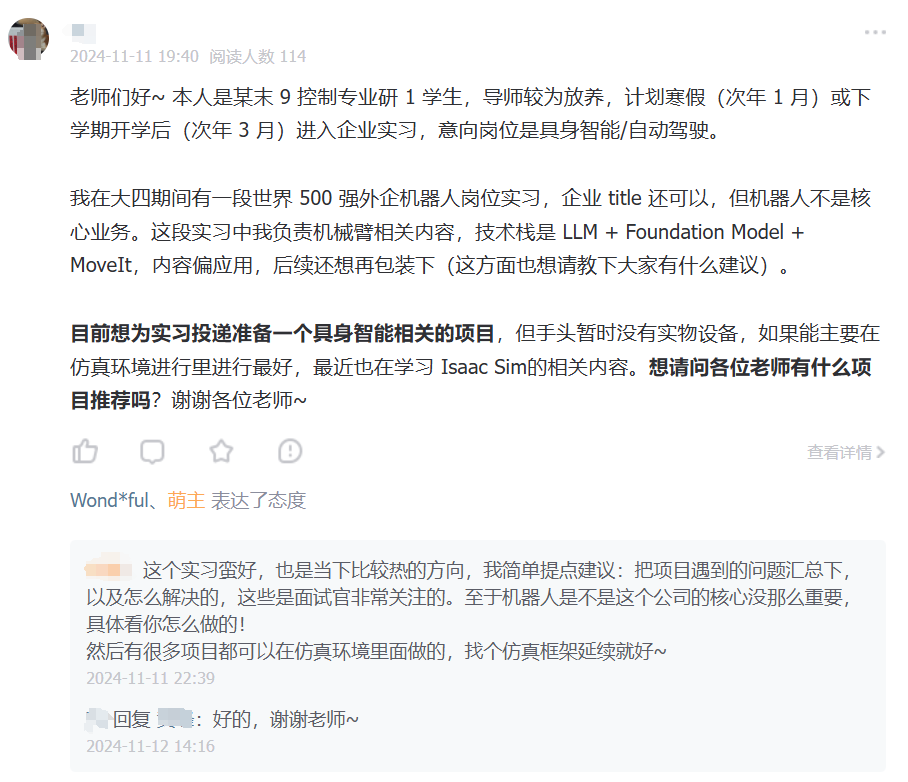
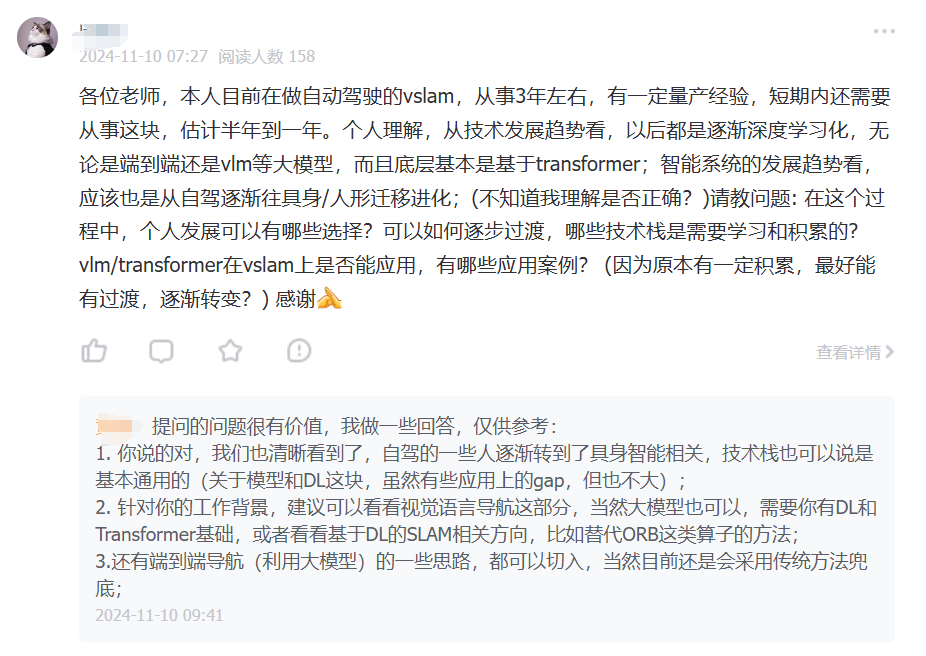
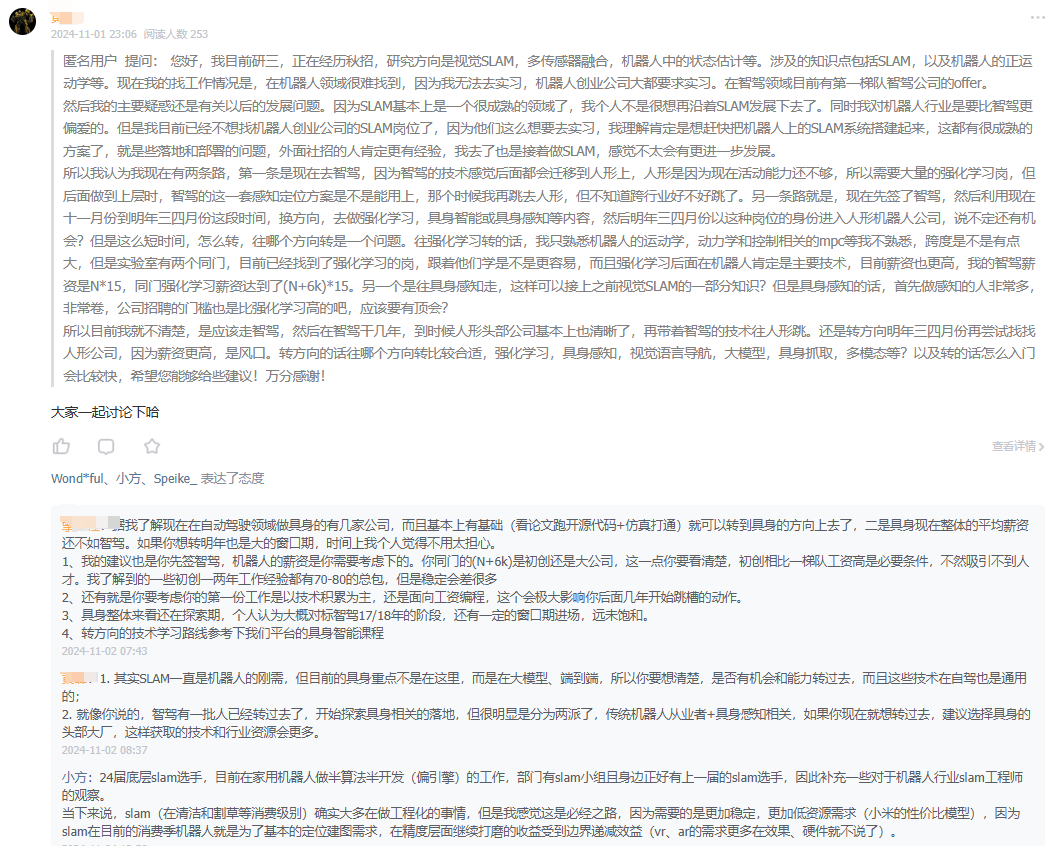
星球内部交流
星球成员可以在星球内部自由提问,无论是工作选择还是研究方向选择,都能得到解答~
扫码加入
欢迎加入具身智能之心知识星球,平均每天不到5毛钱,国内首个具身智能交流社区,这里将承担未来5-10年的技术输出与行业关注,欢迎微信扫码加入。


















 982
982

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









