 具身智能新纪元
具身智能新纪元





关于具身智能的起源
近年来,大语言模型(LLMs)的兴起给机器人领域带来了革命性的改变,大模型赋予了传统机器人理解和推理的能力,让具身智能这一概念再度出现在大众的视角中。OpenCSG 作为国内 AI 开源社区的先锋,对标国外 HuggingFace 平台,对 HuggingFace 的首席科学官(CSO)发起的基于 dora-rs 开源框架的具身智能机器人进行落地实现和开源分享(https://huggingface.co/posts/thomwolf/809364796644704?image-viewer=809364796644704-3234DF5C5B4FF12A512F5D1B04325DF820919CB3)。
OpenCSG 打造中国本土化 Huggingface plus 开源社区 开放传神 OpenCSG 传神社区 官网 https://opencsg.com/
https://opencsg.com/
该机器人搭载了最新的大模型并基于最新的计算框架,展现出来卓越的语言理解和生成能力,并凭借其物理形态实现了与现实世界的无缝互动,展现出一流的机器智能化水准。下面就让我们来看一下一个可以理解你、回应你、并与环境互动的智能伙伴是如何实现的吧!

1. 具身智能:AI领域的新兴热点
近年来,随着大语言模型(LLM)技术的飞速发展,具身智能领域取得了令人瞩目的进展。业界和学术界都在该领域上取得了显著的成果,不仅推动了技术的创新发展,也吸引了大量的资本的关注和投资。在业界,大批科创公司投身于此,带来了一批又一批令人耳目一新的具身智能AI产品。比如:
在今年 3 月份,知名 AI 机器人创业公司 Covariant 推出机器人基础模型 RFM-1(Robot Foundation Model-1)是世界上首个基于真实任务数据训练的最接近于解决真实世界任务的机器人大模型。RFM-1 模型是一个基于真实世界的文本、图像、视频、机器人动作以及一系列传感器读数综合训练得到的多模态大模型,通过接受初始图像和机器人动作的输入,预测接下来视频帧的变化,从而让搭载该模型的机器人可以像人一样对真实世界进行推理和预测。
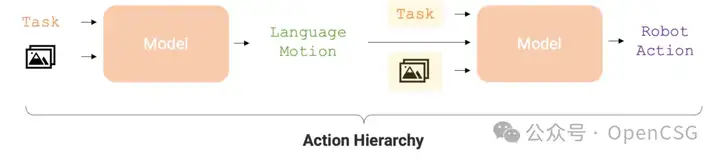
还是今年 3 月份,谷歌 RT 机器人在之前的版本上再一次进化,引入了行动层级(action hierarchy),将复杂的任务分解为简单的语言动作,再转化为机器人动作,充分利用大语言模型的能力,从而提高机器人完成任务的准确性和学习效率。
学术界的研究者也在积极探索具身智能的各种可能。在上个月(5.13-5.17)国际顶级机器人学术会议
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 9868
9868

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









