



新的一年了,自动驾驶之心祝各位小伙伴元旦快乐!话不多说,直接上福利~
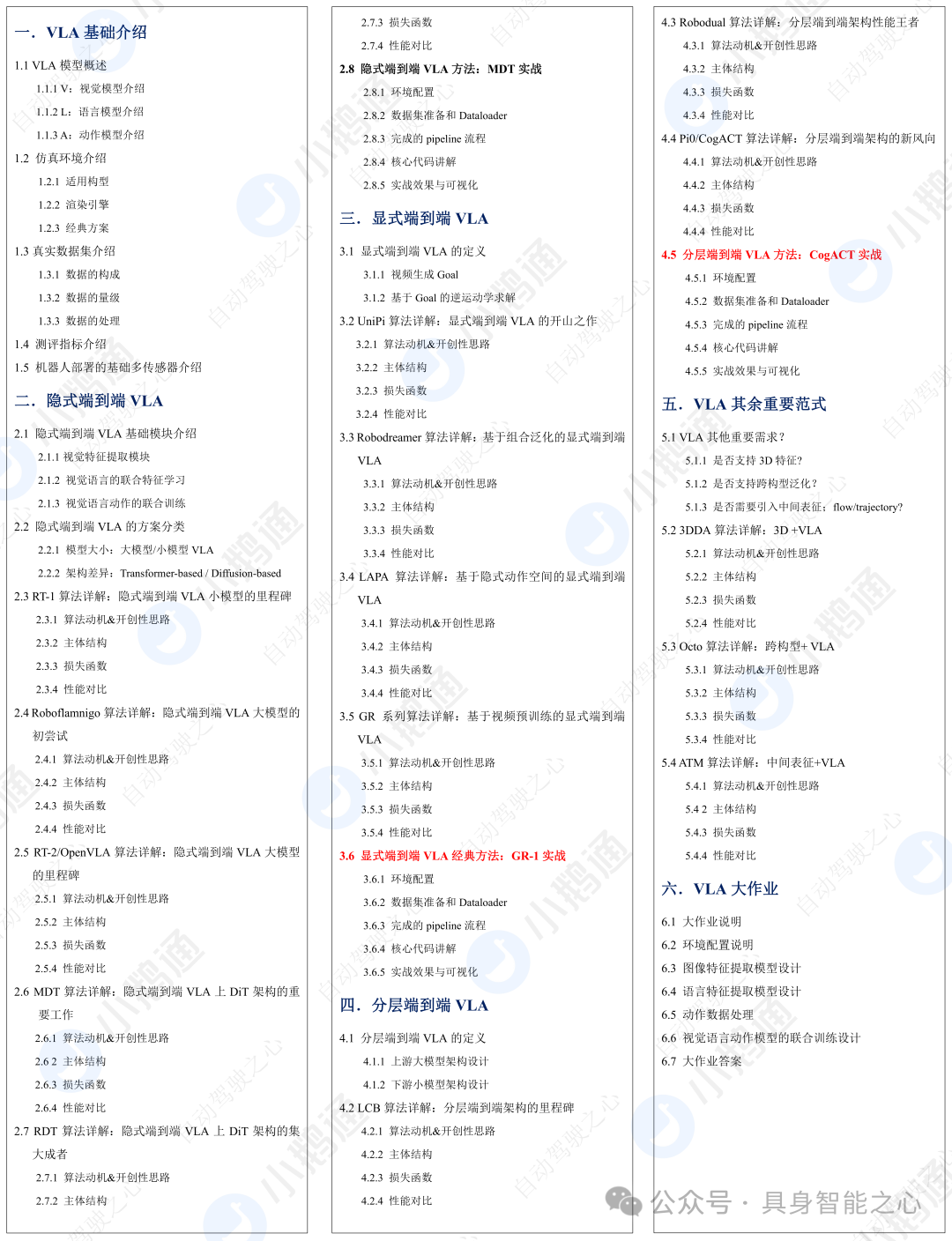
具身智能VLA算法与实战课程
VLA,Vision-Language-Action模型,是具身智能领域的新范式,从给定的语言指令和视觉信号,直接生成出机器人可执行的动作。无论是显示端到到VLA,还是隐式/分层端到端VLA,其中涉及到的模块、细节众多。这类知识点琐碎,系统也比较复杂,如果没有比较好的教程带着入门,往往会踩坑,后期不知道怎么学习。如何进行感知编码、动作生成?不同架构的优缺点是什么?泛化性和通用性如何保留?数据是怎么采集的?联合训练怎么做?这些都是阻挡新手入门以及进阶的难点。
为此,我们联合业界知名的机器人系统与算法专家,联合展开了业内首门面向具身智能的VLA理论与实战课程,让大家真正能够学得透彻,后期配有代码讲解,助力大家真正从实现的角度上搞懂算法。课程大纲:

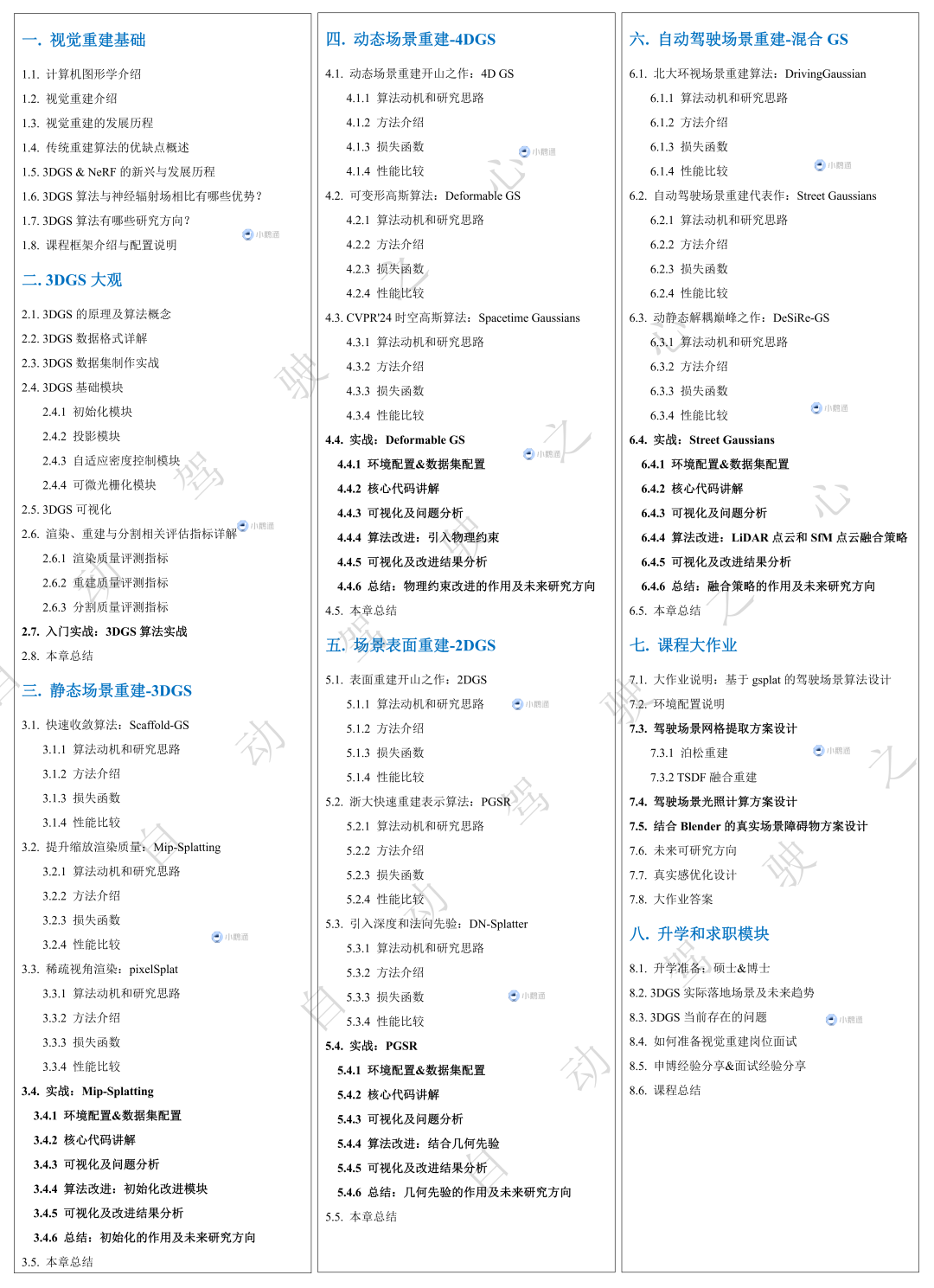
2DGS/3DGS/4DGS/混合GS全栈小班课
这两年最火的领域,无疑有三维重建的一席之地。相比于NeRF的黑盒表示,3D Gaussian的表征方式更符合直觉,更通俗易懂。3DGS之所以爆火,很大程度在于他的实时性。除此之外,Gaussian Splatting根本不涉及任何神经网络,甚至没有一个小型的 MLP,也没有什么 "神经"的东西,场景本质上只是空间中的一组点。而更重要的一点,相比自动驾驶感知任务、大模型之类的领域,3DGS所需的算力非常小,基本上单卡就能运行,训练往往只需要分钟级。在大家都在研究数十亿个参数组成的模型的人工智能世界里,这种方法越来越受欢迎,令人耳目一新。
为此我们联合业内头部自动驾驶公司算法专家,联合展开了业内首门面向3DGS全栈实战小班课,Cover 3DGS的各个子领域,让大家真正能够学得透彻,后期配有代码实战讲解,助力大家真正从实现的角度上搞懂算法。同时作为专享福利,小班课将赠送《NeRF与自动驾驶论文带读课程》!大纲如下:

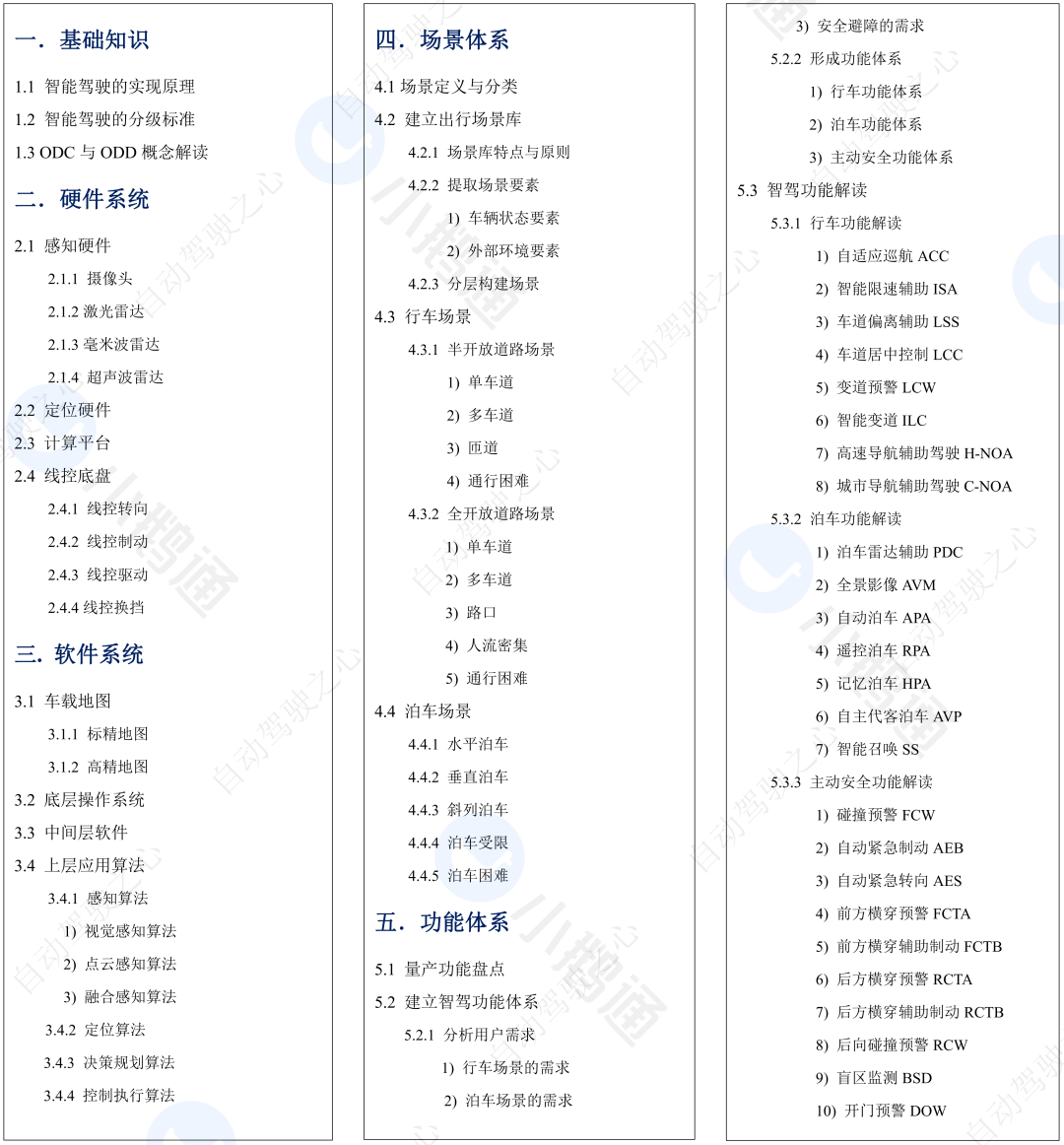
自动驾驶产品经理全栈课程
优秀的产品经理能够显著提升智能驾驶产品的竞争力,规划出符合市场趋势和用户需求的产品方案,不仅是企业核心竞争力的体现,也是智能驾驶未来发展的关键。所以各家公司对产品经理相关岗位人才非常重视,从业者需要同时具备较强的技术理解能力与商业化、产品化思维,可以说,可遇不可求。产品经理不仅推动产品开发和技术落地,更决定了企业在智能驾驶市场中的战略方向和竞争优势。对于任何想要在市场占据一席之地的企业来说,优秀的智能驾驶产品经理不可或缺,随之而来的是企业高薪挖人,一些合作伙伴也给我们开放了60-100w的产品经理岗位,着实很香!
自动驾驶之心在收到许多公司的招聘需求和求职者反馈后,联合行业知名智能驾驶产品专家,展开了国内首门面向自动驾驶产品经理的课程,本系列课程的定位是智能驾驶产品经理必修课,系统地解读了智能驾驶产品的方方面面,覆盖面广,致力于为行业培养更多优秀的产品经理。课程大纲如下:



端到端自动驾驶
端到端的优势非常突出,但仍然有很多难点需要攻克。主要在于数据难定义、数据难制作、网络不好训练、模型不好解释优化、评测定义多种多样!很多公司无法像特斯拉一样获取海量数据,这也是个巨大的瓶颈。今年年中,自动驾驶之心收到了很多同学关于端到端实战相关的需求,虽然我们已经筹备过相关的内容,但早期端到端方案不够成熟,更多是以论文切入。工业界使用的方案关注较少,代码层面上也很少提及。
自动驾驶之心在调研大家的需求后,联合自动驾驶之心课研团队,出品了国内首个《面向工业级的端到端自动驾驶算法与实战》,主讲老师是一线头部自动驾驶公司端到端算法工程师。大纲如下:


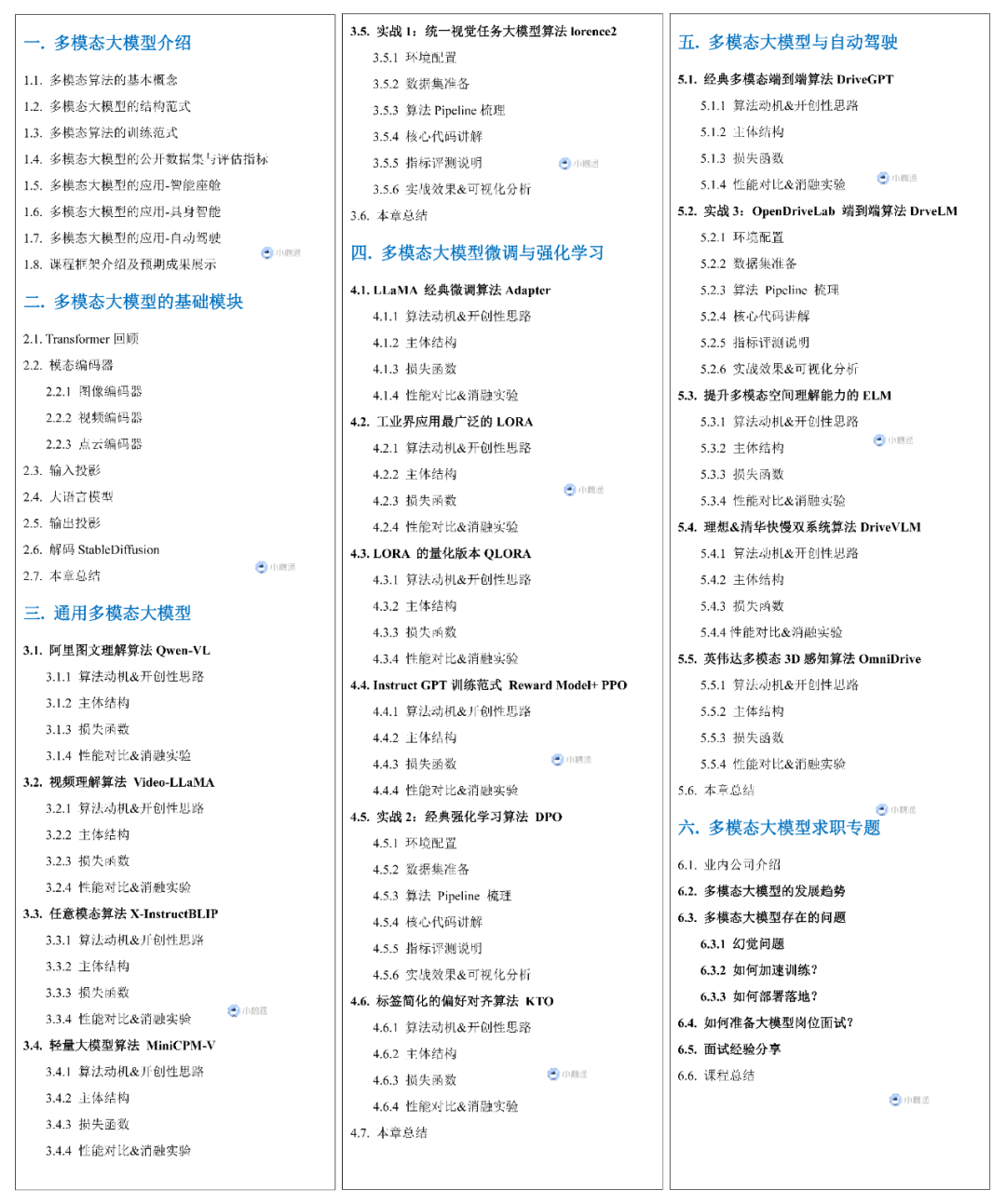
自动驾驶与多模态大模型
可以说国内端到端的技术路线已经明确:端到端+大模型!大语言模型结合自动驾驶作为新兴技术领域,展现着巨大的潜力和影响。这种前沿技术对于快速学习和深入理解提出了挑战,自动驾驶之心进一步打造了自动驾驶多模态大模型实战教程。
该课程旨在为大家提供一个系统化的学习平台,从通用多模态大模型,到大模型微调,最终在聚焦在端到端自动驾驶多模态大模型。这个课程的目的是帮助学习者更好地适应实际工作需要,为其进一步地发展和应用打下扎实的基础,课程大纲如下:

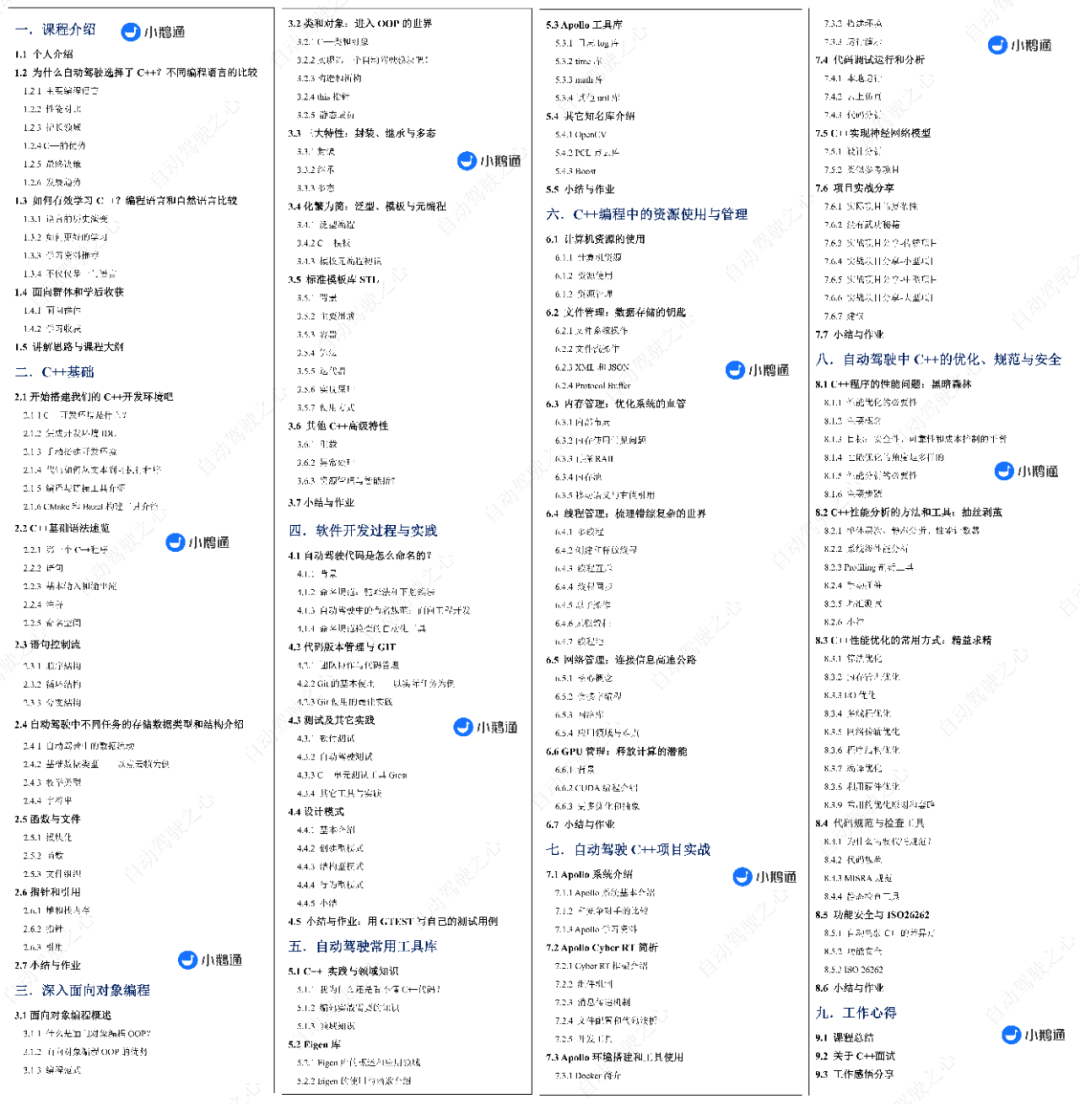
自动驾驶与C++
近40 年以来,C++以其高性能、灵活、稳定和强大的底层支持而闻名。运行速度快、对硬件高效访问、可以实现复杂的计算和控制算法,因此始终是信息行业的热门语言。
自动驾驶和机器人系统的第一要求是安全和稳定,这也是为什么在自动驾驶和机器人系统中,C++几乎是最重要的编程语言。为此自动驾驶之心联合业内C++开发专家,打造了一套行业内最系统的C++课程!就关注三个点:工作技能、求职面试、小白入门;从基础到进阶,从入门到精通。课程大纲如下:

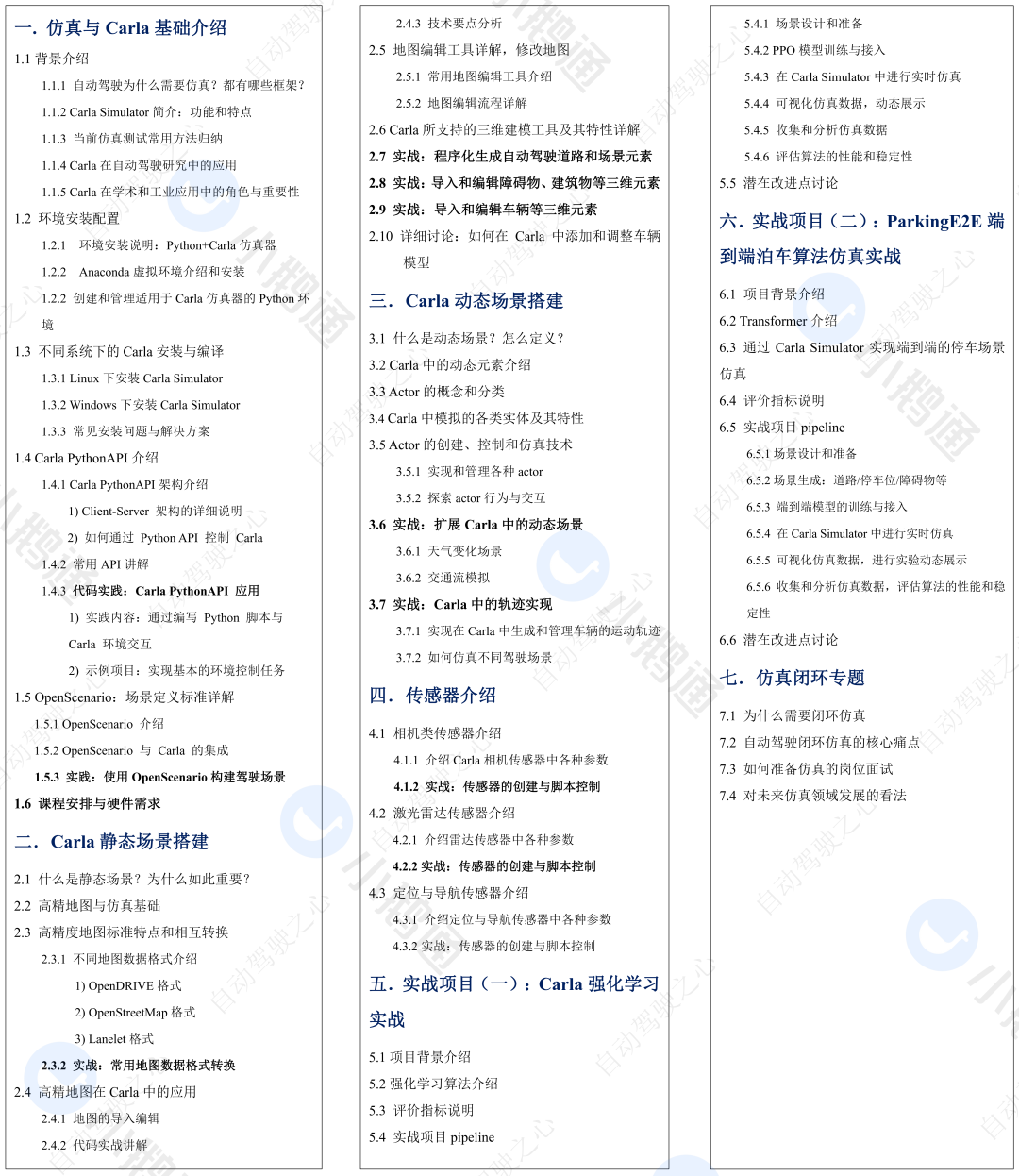
离不开的仿真闭环
在各种自动驾驶社区和技术讨论群中,关于CARLA的问题经常被提起。这反映出,尽管仿真是自动驾驶开发中的关键环节,然而,由于其涉及的知识面广泛、内容复杂,许多开发者,尤其是初学者,常常感到无从下手。除了需要理解各类仿真工具的使用,还要掌握传感器模拟、UE渲染引擎、高精地图应用等多领域的知识。
为此自动驾驶之心联合业内知名仿真专家共同研发了一门面向工业级的Carla仿真项目实战课程。本课程将通过项目实战的方式,帮助大家将这些看似零散的知识点有机串联起来,逐步建立起系统的理解。学员不仅会学习如何在CARLA环境中进行场景设计、传感器设置和仿真地图生成,还会探索如何结合深度学习进行感知算法的训练和测试。此外,课程还会针对实际操作中经常遇到的挑战提供实用的解决方案。大纲一览:

课程咨询
欢迎咨询小助理


















 1012
1012

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









