



作者 | z他山之石 编辑 | 自动驾驶之心
原文链接:https://zhuanlan.zhihu.com/p/14044232777
点击下方卡片,关注“自动驾驶之心”公众号
戳我-> 领取自动驾驶近15个方向学习路线
本文只做学术分享,如有侵权,联系删文
首发于 Frenet坐标系 or Cartesian坐标系?
在智能驾驶领域,轨迹规划问题可以抽象成在满足一定约束条件下寻找最优解的问题,优化变量、状态方程和约束条件是决定优化问题求解复杂性的关键要素。坐标系的选择不仅是解决问题首先要考虑的,而且对优化问题形式和复杂性有着至关重要的影响。
智能驾驶领域中广泛使用的坐标系有Frenet坐标系(sl坐标系)和Cartesian坐标系(xy坐标系),两者最大的区别在于坐标轴是否允许为曲线,Cartesian坐标系即几何中常见的直角坐标系,两条坐标轴是相互正交的直线。而Frenet坐标系允许一条坐标轴为曲线(参考线s),故又称为曲线坐标系。
从定义上可以直觉得出Frenet坐标系特别适合自动驾驶领域的结论,因为车辆的行驶的绝大部分场景都是存在车道线的道路环境下,只要将道路的中心线作为参考线,就可以将复杂的道路环境简化为直线隧道模型,图1显示了Cartesian坐标系向Frenet坐标系的转换。
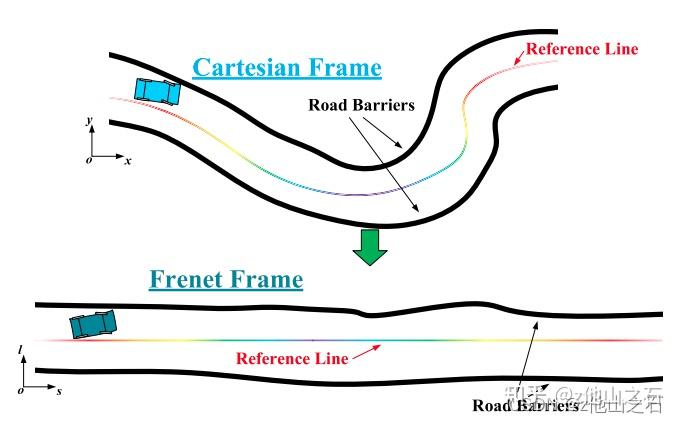
将弯曲的道路拉直,这是Frenet坐标系最大(也许是唯一)的优点,怎么评估这个优点的大小?在自动驾驶领域,道路边界是一个不得不处理的约束,很多情况下,非线性的道路边界也是最难表示和处理的约束。这种转换直接将非线性的道路边界约束变成了线性的约束,从而大大简化了后续优化问题的求解。此外,现实中的车辆大多数时候都是沿着道路中心线行驶的,所以在Frenet坐标系中,车辆的运动可以直接解耦为纵向运动和横向运动,实现了降维的效果,这是在Cartesian坐标系中是很难实现的。所以,虽然Frenet坐标系有诸多不足之处,它依旧是自动驾驶领域优先考虑的坐标系。
下面主要讨论Frenet坐标系在使用过程中可能出现的问题点:
问题1:xy向sl坐标转换的连续性问题
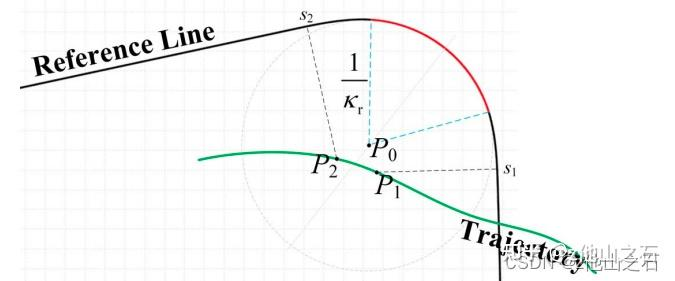
xy坐标向sl坐标转换的第一步是确定投影点的位置,即在s轴上寻找距离点P最近的投影点,这是一个寻找最优值的过程,没法保证其解的唯一性。如图2所示,参考线上红色区域是曲率为kr的圆弧,圆弧上的任何一点都是其圆心位置P0的投影点。多个投影点的后果是坐标转换困难,如果在多个可行解中随机取值就可能会导致连续的xy轨迹转换成不连续的sl轨迹,这是不连续性的第一个来源。即使能实现处处一对一的转换,xy转换成sl也可能变得不连续,如图2所示,Cartesian坐标系下相距很近的P1、P2的投影点s1、s2也差距巨大。对于曲率越大的参考线,发生这种问题的风险就越高。
问题2:对参考线要求高
参考线直接决定投影点的位置,以及sl曲线。以kx表示xy曲线的曲率,kf表示sl曲线的曲率,两者的转换关系如下:

式中kr为参考线曲率,所以要得到曲率连续sl曲线,不仅要求xy曲线的曲率连续,还要求参考线的曲率连续;
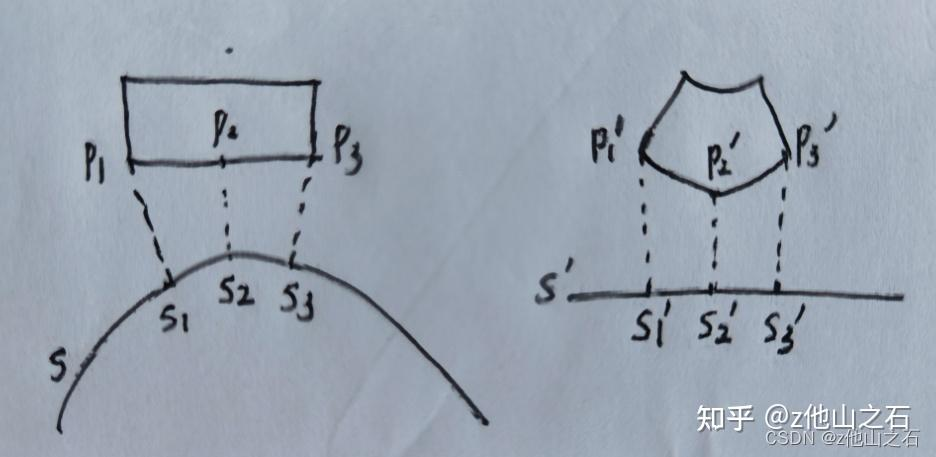
问题3:车辆形状扭曲
车辆一般被简化为具有固定尺寸的矩形,用四个顶点来控制其边界,甚至车辆会被抽象成一个点,向四周碰撞一定距离形成边界,在Cartesian坐标系中,这种简化与实际情况完全相符。Frenet坐标系将弯曲道路拉直的同时,也将规则的车辆变得扭曲,如下图3所示。相应地,Frenet中规则的方形实际上代表的是与参考线平行的扭曲形状,如果简单以四个顶点的模型来代表整个车辆边界,就会与真实车辆形状产生偏差,常用的碰撞检测算法就会失效。这种偏差随着参考线曲率和车辆尺寸的变大而变大。
问题4:sl和xy的坐标转换误差
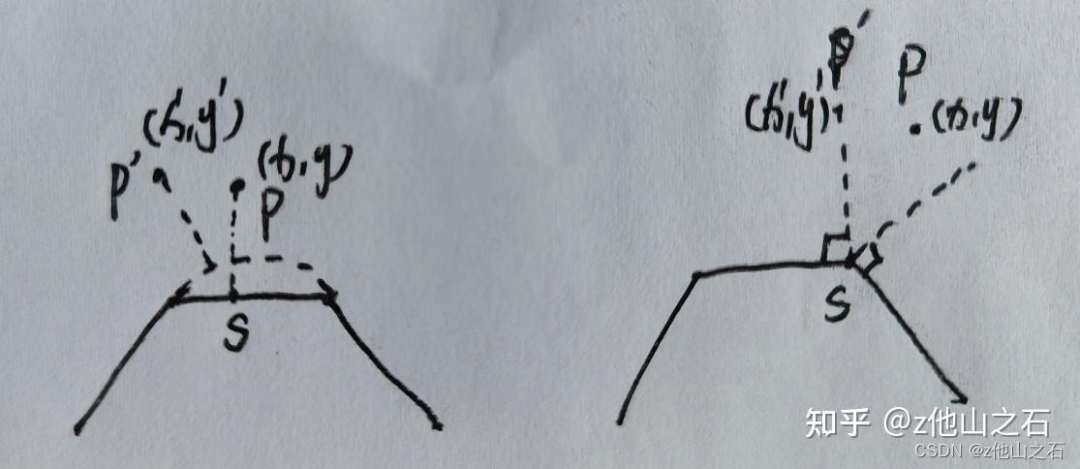
工程应用中,参考线通常是以一系列离散坐标点的形式表示的,只有离散点处(x,y)的信息来自传感器,其他的heading/kappa/dkappa信息都是据此推导而来的,这些信息的连续性或平滑性,依赖于相邻参考点之间的连接处理。使用高阶连续曲线处理,可以解决连续性问题,但是会导致投影点的计算量剧增,而坐标转换的计算是个高频行为,有时甚至是算法的性能瓶颈,工程中为了降低计算复杂性,通常有以下假设:
假设1:xy向sl转换时,假设相邻两参考点之间的参考线是直线,heading保持不变。
假设2:sl向xy转换时,假设相邻两参考点之间参考线的heading是线性变化的。
在这两条不一直的假设下,xy和sl之间的来回转换就是不可逆,即(x, y) → (s,l) → (x', y'),(x, y) != (x', y'),如下图4所示。这种差异也会随着参考线曲率和轨迹的采样间隔的增加而增大。
有了上面的讨论后,我们再重新思考Frenet坐标系和Cartesian坐标系的选择问题,可以有如下建议:
在小曲率的结构化道路中(如高速路或城区快速路),Frenet是首选坐标系。
Frenet坐标系的问题随着参考线曲率的增加而被放大,所以在大曲率的结构化道路(如城区有引导线的路口)中,选择Frenet就要慎重。
对于非结构化的道路,如港口、矿区、停车场,无引导线的路口,建议使用Cartesian坐标系。
[1] B. Li, Y. Ouyang, L. Li, and Y. Zhang, “Autonomous driving on curvy roads without reliance on frenet frame: A cartesian-based trajectory planning method,” IEEE Trans. Intell. Transp. Syst., vol. 23, no. 9, pp.15729–15741, Sep. 2022
① 2025中国国际新能源技术展会
自动驾驶之心联合主办中国国际新能源汽车技术、零部件及服务展会。展会将于2025年2月21日至24日在北京新国展二期举行,展览面积达到2万平方米,预计吸引来自世界各地的400多家参展商和2万名专业观众。作为新能源汽车领域的专业展,它将全面展示新能源汽车行业的最新成果和发展趋势,同期围绕个各关键板块举办论坛,欢迎报名参加。

② 国内首个自动驾驶学习社区
『自动驾驶之心知识星球』近4000人的交流社区,已得到大多数自动驾驶公司的认可!涉及30+自动驾驶技术栈学习路线,从0到一带你入门自动驾驶感知(端到端自动驾驶、世界模型、仿真闭环、2D/3D检测、语义分割、车道线、BEV感知、Occupancy、多传感器融合、多传感器标定、目标跟踪)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、大模型,更有行业动态和岗位发布!欢迎扫描加入

③全网独家视频课程
端到端自动驾驶、仿真测试、自动驾驶C++、BEV感知、BEV模型部署、BEV目标跟踪、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、车道线检测、轨迹预测、在线高精地图、世界模型、点云3D目标检测、目标跟踪、Occupancy、CUDA与TensorRT模型部署、大模型与自动驾驶、NeRF、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频(扫码即可学习)

④【自动驾驶之心】全平台矩阵


















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









