




点击下方卡片,关注“自动驾驶之心”公众号
戳我-> 领取自动驾驶近15个方向学习路线
今天自动驾驶之心为大家分享港中文最新车道线检测的工作—DV-3DLane!全新端到端多模态3D车道线检测框架,性能拉满!如果您有相关工作需要分享,请在文末联系我们!
自动驾驶课程学习与技术交流群事宜,也欢迎添加小助理微信AIDriver004做进一步咨询
论文作者 | Yueru Luo等
编辑 | 自动驾驶之心
车道线检测新SOTA!DV-3DLane:基于多模态端到端车道线检测新框架!
写在前面&笔者的个人理解
近年来,自动驾驶感知算法取得了非常显著的成绩。感知模块作为自动驾驶系统用于观察周围环境最为重要的途径之一,已经吸引了来自工业界和学术界的广泛关注。在感知模块当中,3D车道线的检测是其中非常关键的任务之一,是确保安全可靠导航的关键要素。由于3D车道线检测需要识别环境中车道线边界的3D空间位置,可以为路径规划和车辆控制等任务提供重要数据。
当前主流的3D车道线检测任务主要是采用视觉图像作为输入。其中一种典型的代表即单目的解决方案。这类单目的解决方案以单张彩色图像作为输入,利用IPM变换将二维的图像特征投影到BEV空间中。但由于IPM是基于平坦假设理论,所以基于此类的方法在遇到非平坦路面时会出现匹配错位的问题 。此外,由于以视觉为输入数据的车道线检测算法在遇到恶劣的天气和光照条件下,不可避免的会出现感知现实世界驾驶场景的复杂性和困难性。
与采集图像数据的相机传感器相比,激光雷达传感器由于采集物体的点云数据信息,在空间定位和3D结构感知方面表现的更加出色,补充了相机传感器缺少的深度等信息,并且由于硬件的先进性而得到了工业界和学术界的广泛青睐。此外,最近在3D目标检测任务开展的一系列工作已经证明了激光雷达传感器和多模态融合在自动驾驶感知任务中展现出了广泛的发展前景。
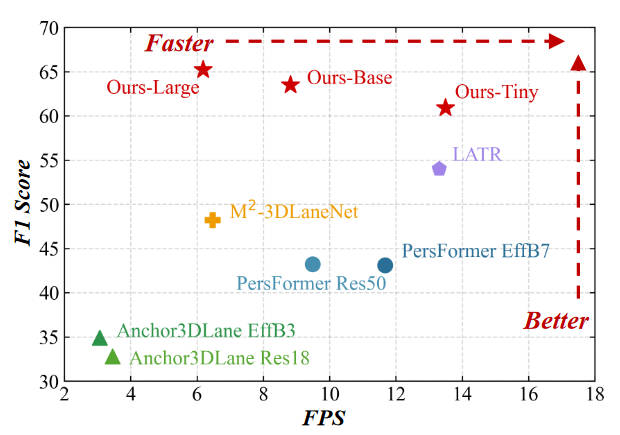
考虑到采集到的图像数据中包含丰富的语义信息,以及BEV空间表示可以提供准确的空间位置信息,我们利用多模态融合的方法来提高3D车道线的检测性能。具体而言,我们同时参考来自PV空间和BEV空间的特征表达结果,进而提高模型的学习表示,提出了一种新颖的端到端多模态3D车道线检测框架,称之为DV-3DLane算法模型。提出的算法模型在OpenLane数据集上实现了SOTA的检测性能,分数提升了,错误率降低了。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 5489
5489

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









