



点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
作者 | 一介书生@知乎
1: 数据标注面临的问题(特别是基于BEV 任务)
随着基于BEV transformer 任务的兴起,随之带来的是对数据的依赖变的越来越重,基于BEV 任务的标注也变得越来越重要。目前来看无论是2D-3D的联合障碍物标注,还是基于重建点云的clip 的车道线或者Occpuancy 任务标注都还是太贵了(和2D标注任务相比,贵了很多)。当然业界里面也有很多基于大模型等的半自动化,或者自动化标注的研究。还有一方面是自动驾驶的数据采集,周期太过于漫长,还涉及到数据合规能一系列问题。比如,你想采集一个平板车跨相机的场景,或者一个车道线城市多变少,少变多的场景,就需要采集人员专项去构建这样的场景。
2: 24年会是世界模型的奇点时刻吗?
世界模型这个概念太过于大,或者说成传感器仿真。在特斯拉AI day 上第一次见识到仿真对标注的颠覆
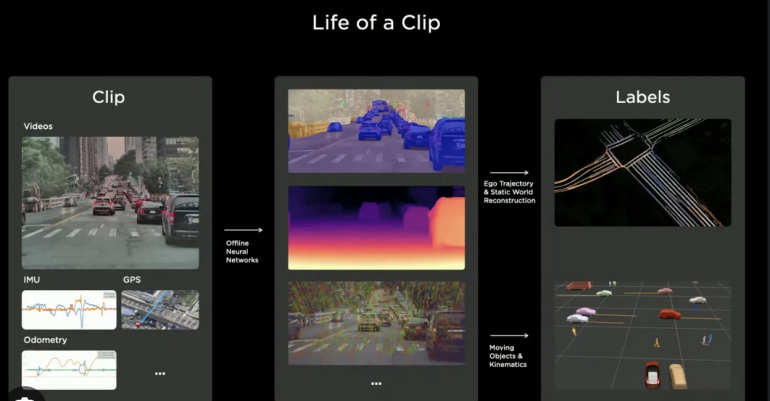
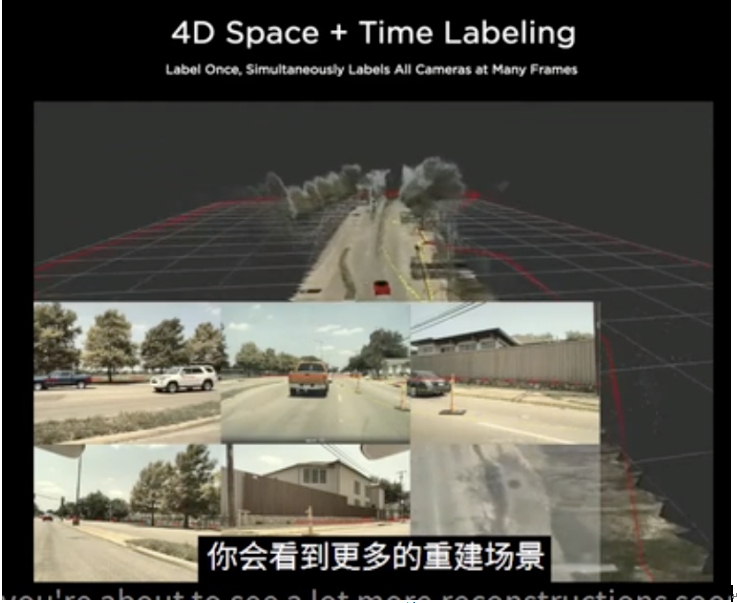
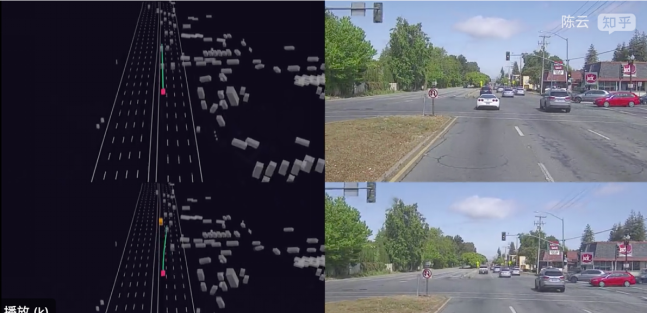
当时看到之后是震惊, 还是震惊!就像当成特斯拉的BEV 一样颠覆。随着越来越多的研究人员在这个方向不断发力,有很多优秀的研究呈现出来。UniSim 的自动驾驶仿真系统, 具备 重放,动态物体行为控制, 自由视角渲染等功能(这应该是每一个训练模型的同学都想拥有的) 。
还可以对lidar 进行仿真。
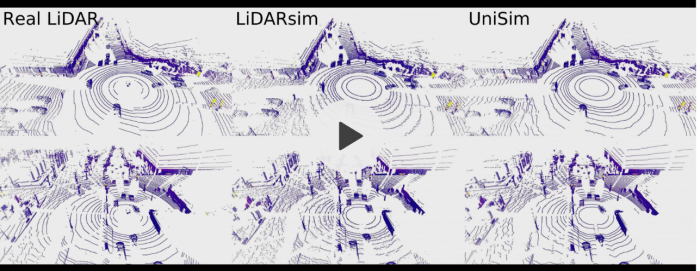
具体见: https://zhuanlan.zhihu.com/p/636695025. 这个方向还有更多的的类似的研究。
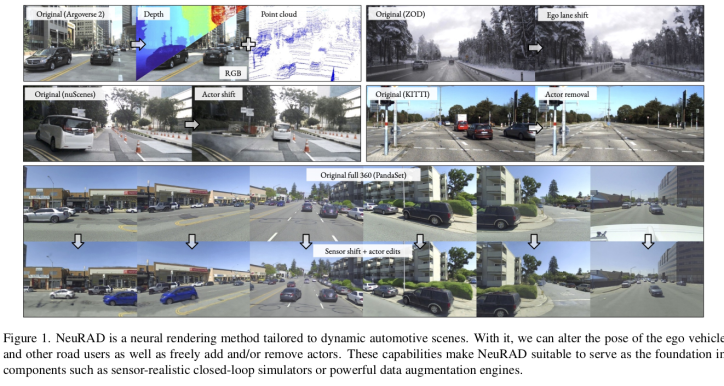
NeuRAD: Neural Rendering for Autonomous Driving
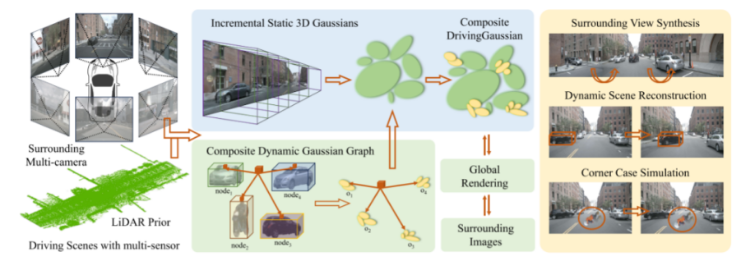
DrivingGaussian: Composite Gaussian Splatting for Surrounding Dynamic Autonomous Driving Scenes 以上的方法都大多和Nerf 相关,整个pipeline 都比较重。还有另一个方向,基于扩散的研究方向。目前也取得了不错的研究。
BEVControl: Accurately Controlling Street-view Elements withMulti-perspective Consistency via BEV Sketch Layout
BEVControl: Accurately Controlling Street-view Elements withMulti-perspective Consistency via BEV Sketch Layout
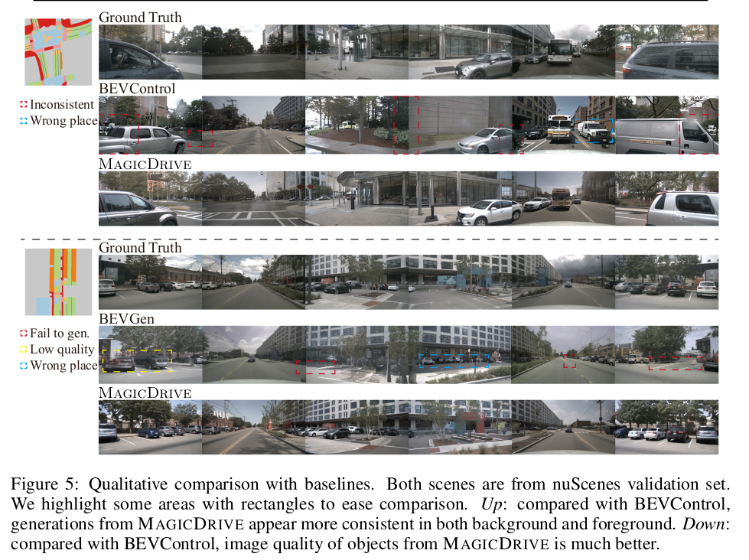
< MagDriver MAGIC DRIVE : STREET VIEW GENERATION WITH DIVERSE 3D GEOMETRY CONTROL >
技术发展太快了,传感器仿真的门槛正在降低,有可能24年自动驾驶标注行业会出现一些颠覆性的产品出来!
投稿作者为『自动驾驶之心知识星球』特邀嘉宾,欢迎加入交流!
① 全网独家视频课程
BEV感知、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、车道线检测、轨迹预测、在线高精地图、世界模型、点云3D目标检测、目标跟踪、Occupancy、cuda与TensorRT模型部署、大模型与自动驾驶、Nerf、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频(扫码即可学习)
 网页端官网:www.zdjszx.com
网页端官网:www.zdjszx.com
② 国内首个自动驾驶学习社区
国内最大最专业,近2700人的交流社区,已得到大多数自动驾驶公司的认可!涉及30+自动驾驶技术栈学习路线,从0到一带你入门自动驾驶感知(2D/3D检测、语义分割、车道线、BEV感知、Occupancy、多传感器融合、多传感器标定、目标跟踪)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、大模型、端到端等,更有行业动态和岗位发布!欢迎扫描下方二维码,加入自动驾驶之心知识星球,这是一个真正有干货的地方,与领域大佬交流入门、学习、工作、跳槽上的各类难题,日常分享论文+代码+视频

③【自动驾驶之心】技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦2D/3D目标检测、语义分割、车道线检测、目标跟踪、BEV感知、多模态感知、Occupancy、多传感器融合、transformer、大模型、在线地图、点云处理、端到端自动驾驶、SLAM与高精地图、深度估计、轨迹预测、NeRF、Gaussian Splatting、规划控制、模型部署落地、cuda加速、自动驾驶仿真测试、产品经理、硬件配置、AI求职交流等方向。扫码添加汽车人助理微信邀请入群,备注:学校/公司+方向+昵称(快速入群方式)

④【自动驾驶之心】平台矩阵,欢迎联系我们!


















 1819
1819

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









