




经常听到同事抱怨实车上标定参数又出问题了,跑出来的结果可视化对不上,又浪费了半天时间。尤其是涉及多个传感器,标定更加是个高难度技术活,无论是机器人厂、主机厂还是Tier1、Tier2等,都对标定非常重视,标定效果将会直接影响下游感知、定位融合的应用!
传感器是自动驾驶系统能够感知周围环境的决定性因素,它们是自动驾驶系统能够准确定位的前提。装车后,需要进行传感器标定来消除安装误差,从而确保传感器数据准确无误。正确的传感器标定对于自动驾驶系统运行是至关重要的,它既可以为后续的建图、定位、感知和控制打下坚实的基础,也可以影响车辆的行驶状态。此外,传感器标定的精度也直接影响传感器的使用上限精度,因此,正确的传感器标定是自动驾驶系统稳定运行的关键所在。传感器标定是自动驾驶的基本需求,在自动驾驶和机器人系统中有着丰富的实际应用,最近越来越多标定的相关论文出现在顶会和期刊中,对于学术研究也是一个非常热的方向。
然而,目前还没有一个系统讲解多传感器标定的课程,许多小伙伴不知道怎么提升标定精度?多传感器之间的位姿解算也一头雾水。我们和多家自动驾驶公司的多传感器标定算法人员进行了沟通,认真打造了一个系统的课程学习计划,并由行业专家领衔讲解,将从多个方面给大家系统性的讲解不同场景下的标定算法:
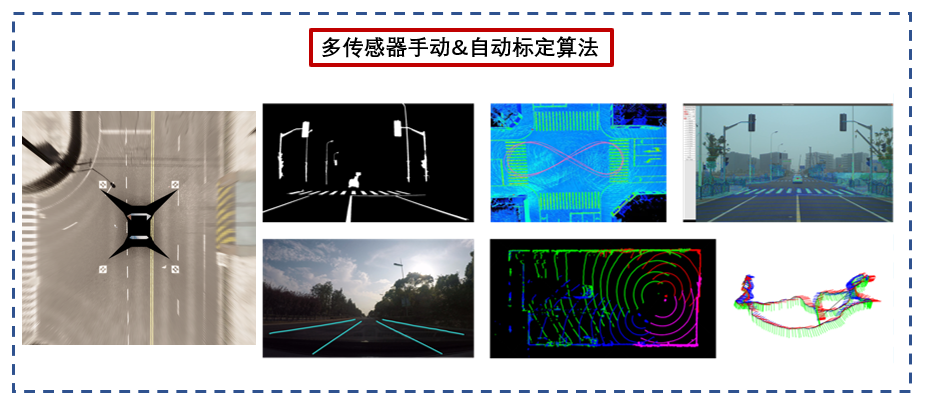
多传感器手动&自动标定算法: 可以用于个人研究者&自动驾驶公司
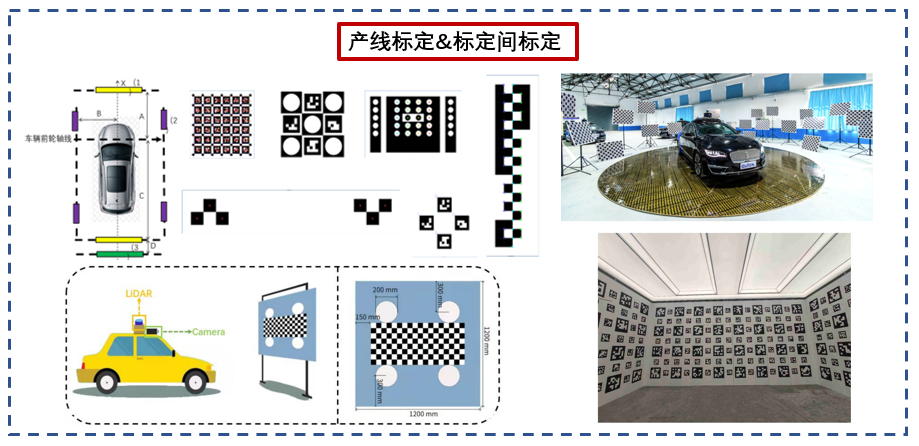
产线标定&标定间标定: 可以用于车企进行量产标定
 </
</
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 12万+
12万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









