



作者 | 王方浩 编辑 | 汽车人
原文链接:https://zhuanlan.zhihu.com/p/659715515
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
点击进入→自动驾驶之心【3D目标检测】技术交流群
本文只做学术分享,如有侵权,联系删文
在自动驾驶工作中,激光雷达点云的处理必不可少,比较传统的算法库是pcl,它提供了点云可视化工具pcl_viewer,但在深度学习模型开发过程中,我们不仅仅需要显示点云,还需要显示检测结果。
因此不管是pcl_viewer,还是CloudCompare都无法满足要求。
项目介绍
那么能不能有这样的一个工具,首先能够可视化点云和包围盒,除此之外还足够灵活(可以定制数据处理过程)。灵活很好实现,比较确定的路线是python,足够灵活,定制起来也很方便,可视化就一直没搞定,找不到比较好的库,最后不得不说,找到了open3d,很多方面都设计的非常优秀。
技术方案大致确定了,利用open3d作为底层图形库,用python搭框架来实现可视化点云和标签。功能上
支持主流的数据集,可以直接显示数据。
用户可以自定义数据处理函数,足够灵活。
支持数据分析和数据清洗。
等到我想出来,实际上open3d-ml已经实现了类似的事情,并且还集成了深度学习的训练过程。不过pcdviz更专注于做显示和分析,不涉及深度学习训练,因此在一些场景可能也有用武之地。
下面我们开始介绍pcdviz
github.com/daohu527/pcdviz
安装
你可以通过以下命令快速的安装pcdviz
pip3 install pcdviz快速开始
安装完成之后,你可以在很多场景中使用它,下面我们举一些示例。
显示点云
如果你仅仅只是想显示点云,可以通过以下命令快速的实现
pcdviz --pcd=data/kitti/velodyne/training/000003.bin --example
# --example 为示例,正式使用中不需要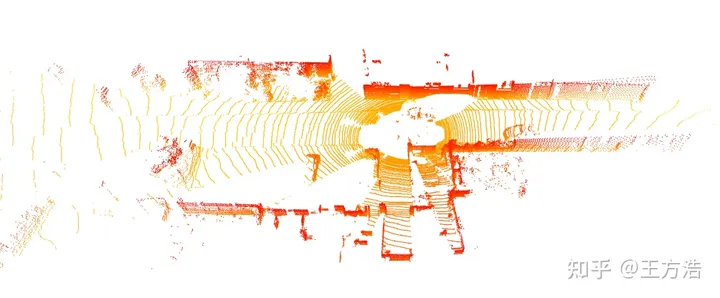
显示多个点云
如果你想显示多个点云,例如在查找地面过程中显示地面和非地面,或者在点云配准过程中查看2帧点云的配准结果。
从这里开始,为了灵活配置,会使用配置文件的方式
pcdviz --cfg=config/multi_pointcloud.yaml --example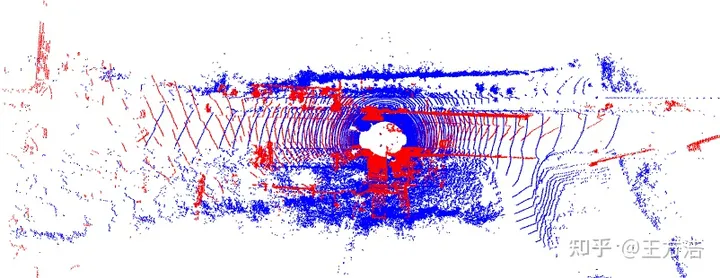
显示点云和包围盒
显示点云,以及检测结果(包围盒),你可以设置多个标签,例如同时显示ground truth和模型推理的结果,方便进行对比。
pcdviz --cfg=config/frame_visualize.yaml --example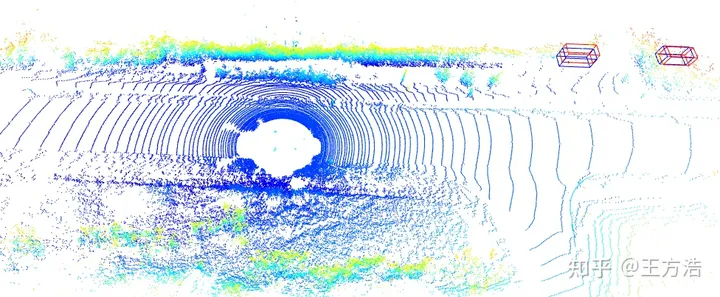
显示数据集
你也可以显示整个数据集,并且通过快捷键(按键N)来切换下一帧。
pcdviz --cfg=config/dataset_visualize.yaml --example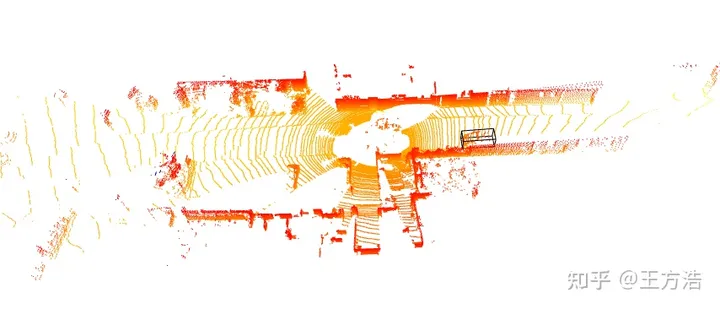
计划
目前还遗留2个大的工作没有完成。一是用户自定义的回调,目前已经把回调的接口设计完成了,功能还没有实现,二是数据集统计和过滤的工作还没有完成。
① 全网独家视频课程
BEV感知、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、点云3D目标检测、目标跟踪、Occupancy、cuda与TensorRT模型部署、协同感知、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频(扫码即可学习)
 视频官网:www.zdjszx.com
视频官网:www.zdjszx.com
② 国内首个自动驾驶学习社区
近2000人的交流社区,涉及30+自动驾驶技术栈学习路线,想要了解更多自动驾驶感知(2D检测、分割、2D/3D车道线、BEV感知、3D目标检测、Occupancy、多传感器融合、多传感器标定、目标跟踪、光流估计)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、AI模型部署落地实战、行业动态、岗位发布,欢迎扫描下方二维码,加入自动驾驶之心知识星球,这是一个真正有干货的地方,与领域大佬交流入门、学习、工作、跳槽上的各类难题,日常分享论文+代码+视频,期待交流!

③【自动驾驶之心】技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦目标检测、语义分割、全景分割、实例分割、关键点检测、车道线、目标跟踪、3D目标检测、BEV感知、多模态感知、Occupancy、多传感器融合、transformer、大模型、点云处理、端到端自动驾驶、SLAM、光流估计、深度估计、轨迹预测、高精地图、NeRF、规划控制、模型部署落地、自动驾驶仿真测试、产品经理、硬件配置、AI求职交流等方向。扫码添加汽车人助理微信邀请入群,备注:学校/公司+方向+昵称(快速入群方式)

④【自动驾驶之心】平台矩阵,欢迎联系我们!



















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









