




 NeRF-RPN是首个将区域提议网络(RPN)引入NeRF(神经辐射场)的通用3D目标检测框架。该框架直接从NeRF的3D体积特征中回归目标边界框,无需额外的图像渲染。通过实验,论文展示了NeRF-RPN在不同主干网络、RPN头和损失函数上的有效性,并构建了一个新的室内NeRF数据集用于3D目标检测。这种方法能在115ms内处理NeRF场景,同时保持高召回率。
NeRF-RPN是首个将区域提议网络(RPN)引入NeRF(神经辐射场)的通用3D目标检测框架。该框架直接从NeRF的3D体积特征中回归目标边界框,无需额外的图像渲染。通过实验,论文展示了NeRF-RPN在不同主干网络、RPN头和损失函数上的有效性,并构建了一个新的室内NeRF数据集用于3D目标检测。这种方法能在115ms内处理NeRF场景,同时保持高召回率。
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
点击进入→自动驾驶之心【目标检测】技术交流群
后台回复【3D检测综述】获取最新基于点云/BEV/图像的3D检测综述!
摘要
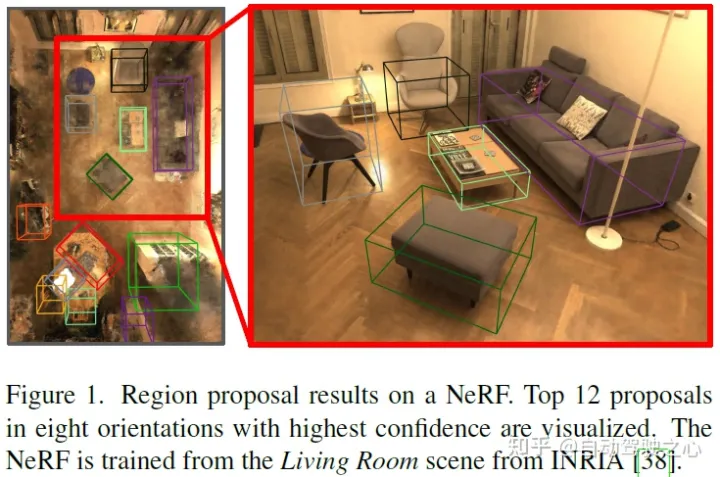
本文介绍了首个基于NeRF的通用目标检测框架NeRF-RPN。给定预先训练的NeRF模型,NeRF-RPN旨在检测场景中目标的所有边界框。通过利用结合多尺度3D神经体积特征的新颖体素表示,论文证明了可以直接回归NeRF中目标的3D边界框,而无需在任何视点渲染NeRF。NeRF-RPN是一个通用框架,可用于检测没有类标签的目标。论文使用各种主干架构、RPN头设计和损失函数对NeRF-RPN进行了实验。所有这些都可以以端到端的方式进行训练,以估计高质量的3D边界框。为了促进NeRF目标检测的未来研究,论文构建了一个新的基准数据集,该数据集由合成数据和真实数据组成,并进行了仔细的标记和清理。
总结来说,本文的主要贡献如下:
首次将RPN引入NeRF用于3D目标检测和相关任务;
基于现有合成室内数据集Hypersim[46]和3D-FRONT[11]以及真实室内数据集ScanNet[5]和SceneNN[19
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1231
1231

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









