



作者 | 初光 编辑 | 车端
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
点击进入→自动驾驶之心【全栈算法】技术交流群
纯视觉信徒马斯克,割掉特斯拉汽车上最后一颗雷达刚过去两个月。
现在又反悔了。
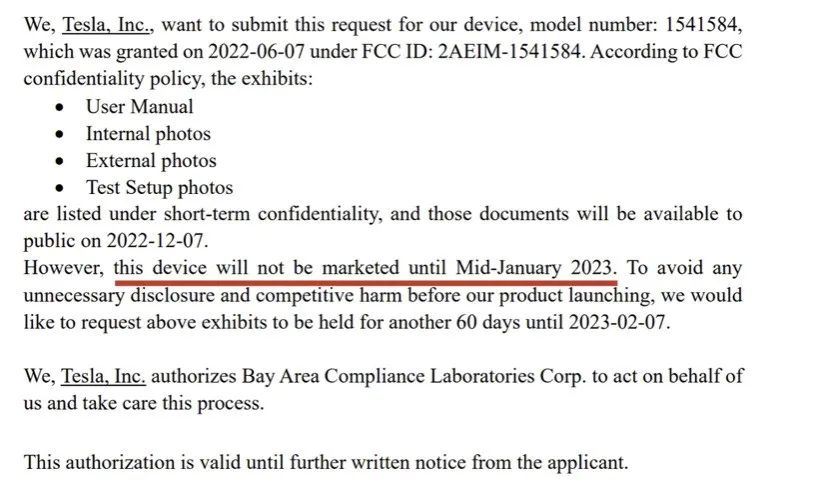
根据特斯拉最新一份材料,最早明年1月中旬,一款新的雷达将重新上车。
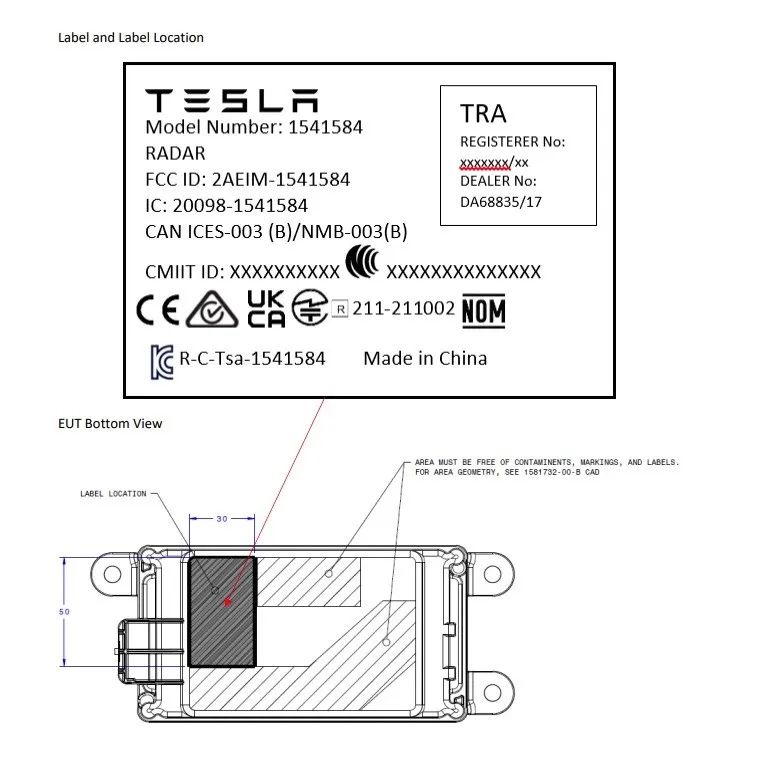
这份材料上交至FCC(美国联邦通讯委员会),主要目的是申请延长60天的保密期,暂不对外雷达的具体细节、外观照片。
搞得神神秘秘,不禁引起外界议论纷纷,“这是怕潜在客户知道了会推迟购买吗?”
马斯克对雷达的嫌弃,业内众所周知。
激光雷达,2019年他就曾放话“用激光雷达的都是傻子,像是人身上长了一堆阑尾。”
毫米波雷达,去年5月北美地区特斯拉Model 3和Y车型上率先取消。
最后还剩下超声波雷达,今年10月正式被抛弃,从此阑尾割了个干净。
此外,他还在与网友交流时说过这样一段话:
在雷达波段下,现实就像一个怪异的鬼魂世界。除了金属之外,几乎所有东西都是半透明的。
马斯克种种言论与行动,已经在消费者群体里培养出一批纯视觉自动驾驶的忠实拥护者,没想到打脸来得这么快。详情请关注公众号【车端】

那么问题来了
究竟什么雷达,能让马斯克反悔
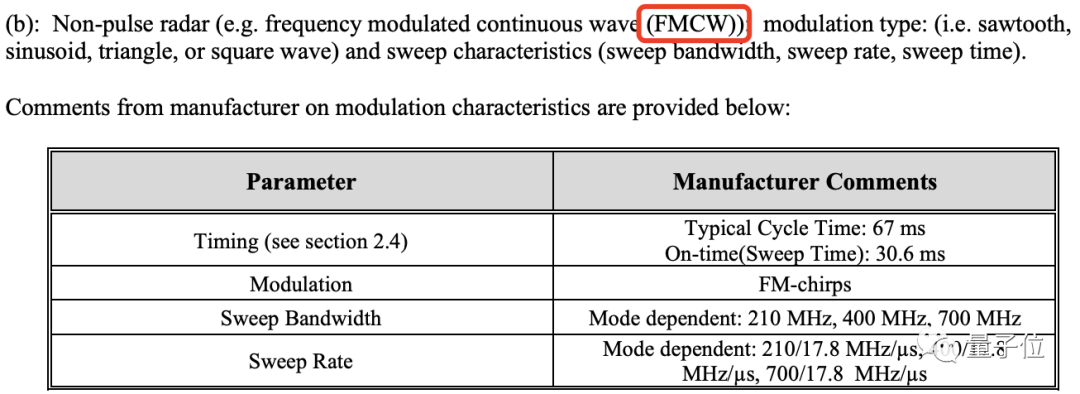
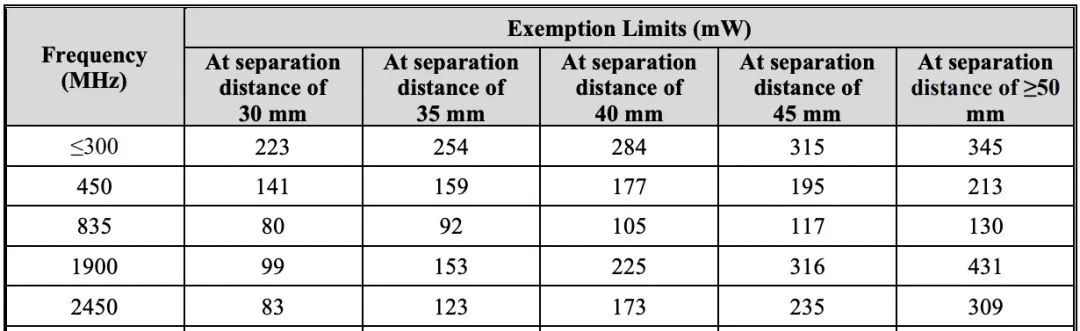
根据文件信息,这款雷达是一种非脉冲毫米波雷达,工作频率为76-77GHz,支持3种扫频模式。
最大扫频带宽为700MHz,最小为210MHz,帧周期约为67ms。
具体而言,它属于调频连续波雷达(FMCW)。
FMCW的优势是结构相对简单、容易实现、尺寸小、重量轻以及成本低。
同时,性能方面,它能够测量到非常小的目标范围(最小测量范围与传输波长相当)及其相对速度,没有高峰值功率脉冲辐射的安全性问题。
可以应用到道路车辆监测记录、汽车防撞、车流量检测、自动驾驶等领域,博世、大陆、德尔福、电装等汽车零部件供应商都已经掌握了FMCW雷达的核心技术。
不过功率方面,特斯拉基于FMCW的这款新雷达比“阉割”之间52mW的ARS-4B高了不少。
另外,新雷达应该并非特斯拉纯自研。
今年十月份的时候,外媒electrek曾放出消息称特斯拉正在添加一款新的4D雷达,其射程是之前雷达的两倍。
里面提到了以色列初创公司Arbe Robotics,它们家有一款叫做“Phoenix(凤凰)”的雷达。
而现在,恰好在特斯拉提交的报告中,也提到了Phoenix。
等于实锤electrek十月份的爆料。
(其实有黑客早在去年10月就发现Phoenix和特斯拉的关系了)。
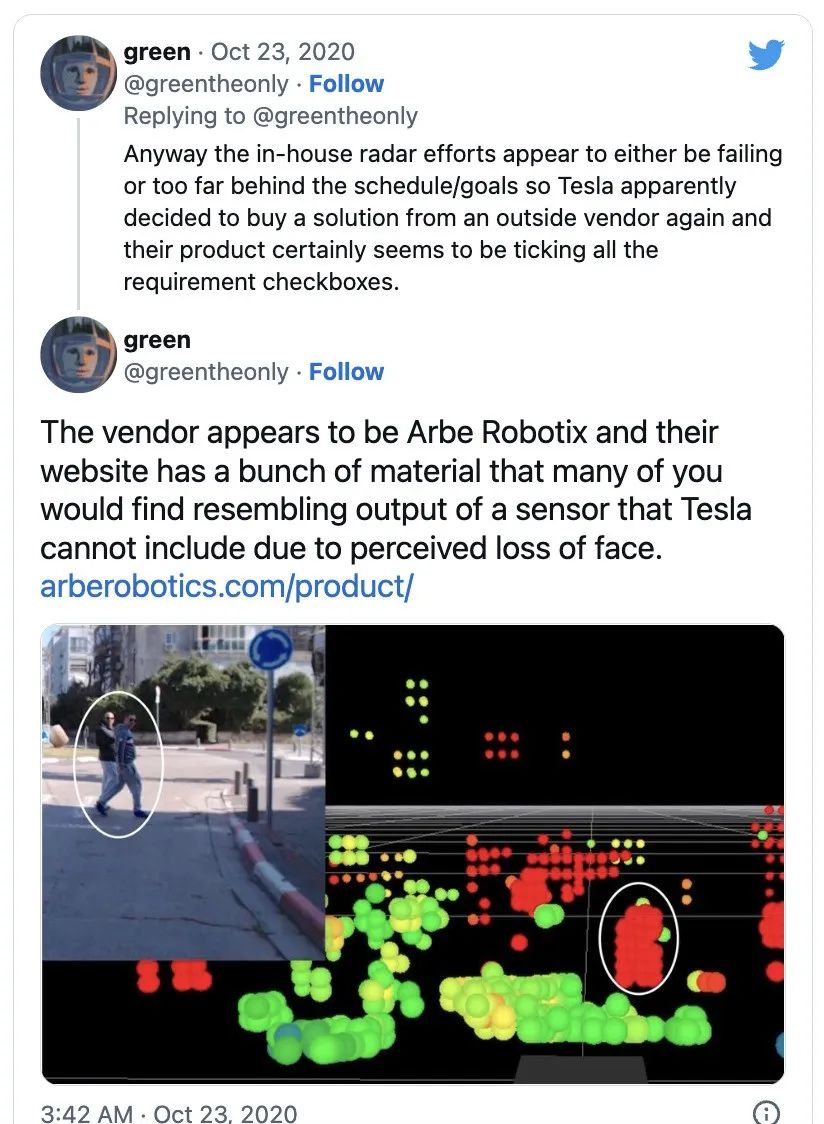
据悉,Arbe称自家的Phoenix雷达是实现真正道路安全(ADAS、L3和更高级别自动驾驶)和欧洲NCAP(欧盟新车安全评鉴协会)路线图的关键帮手。
因为它能够实现对行人、自行车和摩托车等小型实体的准确检测和跟踪,即使它们的一部分被其他车辆或静止物体遮挡,Phoenix也能持续感知到它们的方向和速度,提供不间断的报告。

具体参数上,Phoenix可以将特斯拉原有毫米波雷达的探测范围扩大约一倍,达到300米。(原来的ARS410射程为160米)
而它最主打的特性还是超高分辨率(1°azimuth 1.7° elevation)。
这正中马斯克下怀。
因为马斯克曾经说过,毫米波雷达也不是不行,高分辨率的其实可以胜过纯视觉方案。但可惜当时并没有这样满足马斯克需求的产品。
而除了超高分辨率,Phoenix的4D特性也是马斯克看重的一个点。比如最近他就透露了这样一个信息:
我们正在从对时间相关性很强但不太好的图片识别过渡到4D(类似于视频)。这种架构变化已经进行了一段时间,虽然还没有真正应用到生产团队中,但这对全自动驾驶来说才是真正重要的。
因此,综上来看,马斯克现在遇到了合适的毫米波雷达,不介意打破此前的决定,开始了“双向奔赴”。
毫米波雷达与幽灵刹车
特斯拉取消毫米波雷达的动作,曾引起一大波争议。
21年4月,自动驾驶系统FSD的V9.0 beta测试版宣布采用纯视觉方案。
一个月后,北美地区新交付的Model 3和Model Y车型便不再配备毫米波雷达。

当时很多人不解,成本不过几百块,为自动驾驶系统增加些安全冗余,为啥不用?
马斯克对此的回应是,纯视觉比视觉+雷达要更安全。
当雷达和视觉出现不一致时,你该信谁的?
他进一步解释到,雷达数据和摄像头信号都是比特流,摄像头的信息量已经比雷达高上几个数量级,加入雷达实际上减少了信噪比。
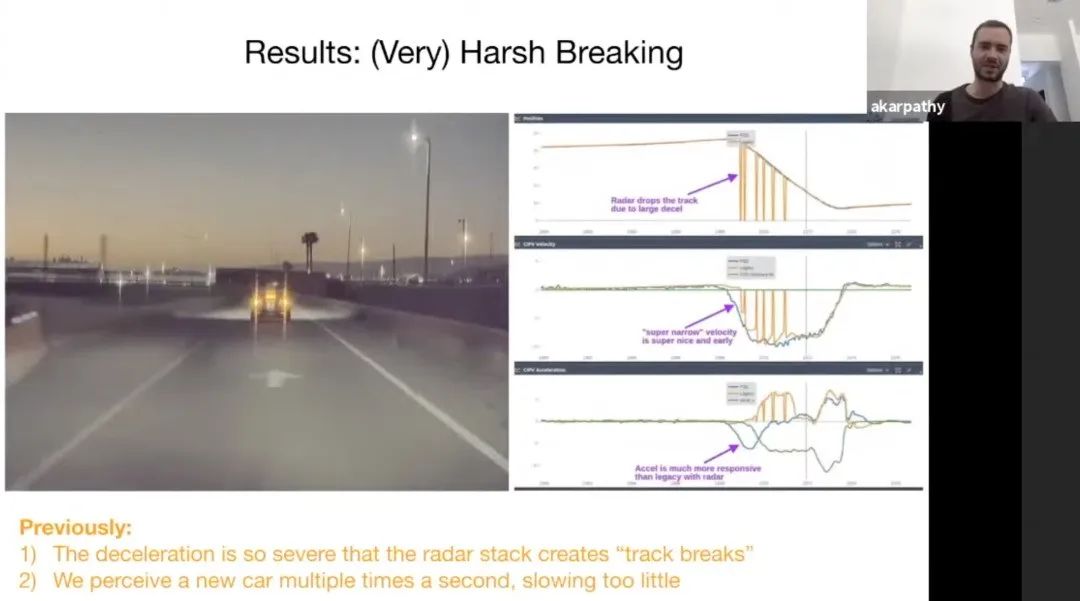
时任特斯拉AI总监的Andrej Karpathy也在CVPR’21 WAD自动驾驶研讨会上详细分析过毫米波雷达的问题所在,他列举了3个场景。
第一种情况,当前车快速刹车时,毫米波雷达无法很好地跟踪前方车辆。
数据表现就像前车在短时间内反复消失、出现,可能误导自动驾驶系统(黄线)。相比之下,纯视觉方案的表现就足够平滑。
第二种情况,前方出现立交桥。
3D毫米波雷达没有垂直分辨率,会认为有静止的物体在眼前,导致“幽灵刹车”。
第三种情况,前方有大卡车停在路边。
毫米波雷达无法确定前方物体是否静止,任务交给视觉传感器,110米的距离得出判断。而纯视觉方案则可以做到在180米距离作出判断,并在145米开始减速。
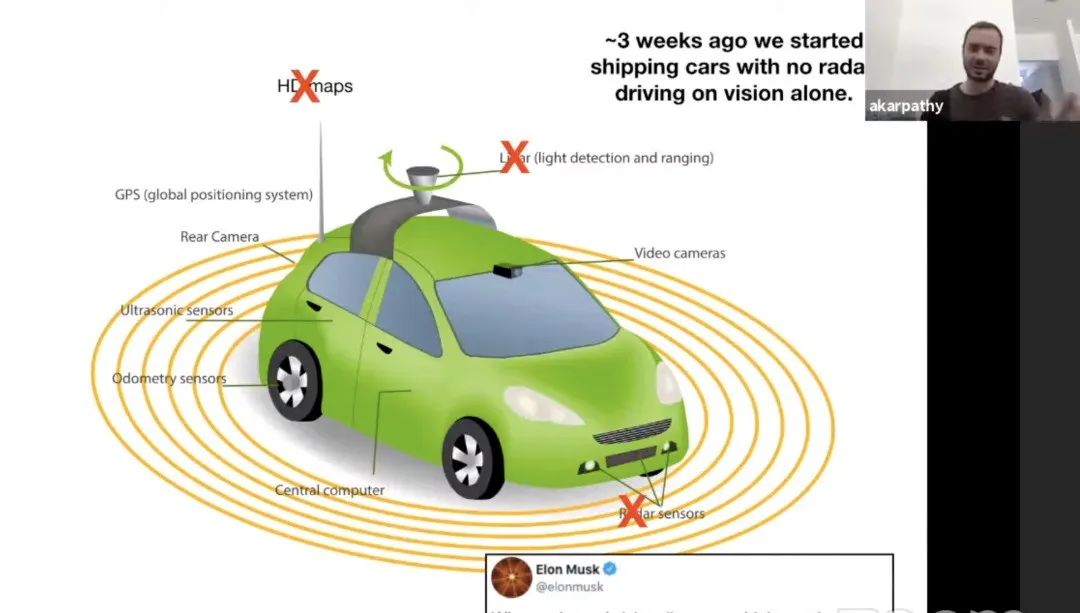
而像这样的场景,特斯拉总结了6000多个,可分为70个类别,每天都在模拟系统里不断运行以提高神经网络的能力,从而最终可以取消掉雷达。
但是,来到学术会议之外,纯视觉方案的实际表现却不如人意。
2021年下半年开始,特斯拉“幽灵刹车”现象不降反增,惊慌失措的车主向NHTSA(美国国家公路交通安全管理局)提出大量投诉。
10月,特斯拉生成故障现象由FSD软件更新导致并回滚了版本,结果自那之后有关“幽灵刹车”的投诉不降反升。
今年2月,NHTSA对特斯拉幽灵刹车现象正式展开调查,初步调查重点是41.6万辆21-22年生产的特斯拉Model3和Model Y车型。
随着调查展开,发现其实旧款Model 3和Model Y车型上幽灵刹车事件也不少,特别是在FSD升级到纯视觉版本之后。

关于这次新增的4D毫米波雷达,安霸半导体的雷达技术副总裁表示,“从工作频率以及雷达的机械设计来看,似乎用于汽车辅助驾驶。”
只是具体用在哪些车型还没有消息,网友纷纷开始议论,猜Semi卡车、赛博皮卡甚至机器人的都有……
不过也不排除一种可能性,是用于明年的新款Model 3(代号Project Highland)。
据路透社报道,升级版Model 3将于明年7月-9月在特斯拉中国工厂投产。
一辆疑似为新版Model 3的原型车已被人拍到,前后都上了伪装。

眼尖的网友指出,右前车灯的一角可能有新增的传感器。

对于这款新车,你有什么期待?
【自动驾驶之心】全栈技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦目标检测、语义分割、全景分割、实例分割、关键点检测、车道线、目标跟踪、3D目标检测、BEV感知、多传感器融合、SLAM、光流估计、深度估计、轨迹预测、高精地图、规划控制、模型部署落地、自动驾驶仿真测试、硬件配置、AI求职交流等方向;

添加汽车人助理微信邀请入群
备注:学校/公司+方向+昵称
自动驾驶之心【知识星球】
想要了解更多自动驾驶感知(分类、检测、分割、关键点、车道线、3D目标检测、多传感器融合、目标跟踪、光流估计、轨迹预测)、自动驾驶定位建图(SLAM、高精地图)、自动驾驶规划控制、领域技术方案、AI模型部署落地实战、行业动态、岗位发布,欢迎扫描下方二维码,加入自动驾驶之心知识星球(三天内无条件退款),日常分享论文+代码,这里汇聚行业和学术界大佬,前沿技术方向尽在掌握中,期待交流!

















 1345
1345

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









