 用v4l2-ctl、media-ctl采集摄像头数据
用v4l2-ctl、media-ctl采集摄像头数据







文章目录
1、前言
本文将介绍如何使用v4l2-ctl、media-ctl工具采集UCV摄像头数据和MIPI摄像头数据。
2、v4l2-utils
v4l2-utils是一个用于 Linux 系统的工具包,包含一系列与 Video4Linux2 (V4L2) 框架相关的实用程序和库。它旨在帮助开发者、系统管理员和用户进行 V4L2 设备的管理、测试、配置和诊断。
2.1、主要组成部分
v4l2-ctl:
- 用于操作和管理 V4L2 设备节点(如
/dev/videoX)。 - 支持设置设备的格式(分辨率、像素格式等)、请求和管理缓冲区、控制视频流的启动和停止。
media-ctl:
- 专注于管理媒体设备的拓扑结构,操作实体(entity)、接口(pad)和链接(link)。
- 可以设置或查询设备之间的链接状态,定义数据流的路径。
开发库:
- 包括
libv4l2等库,提供对 V4L2 设备的编程支持。
3、采集UCV摄像头数据
UVC(USB Video Class)摄像头是一种遵循USB视频类标准的摄像头设备,广泛应用于多种场景,具有即插即用、高兼容性和无需额外驱动程序的特点。
对于USB摄像头来说,可以直接使用v4l2-ctl工具来采集数据。
3.1、查看USB摄像头节点
v4l2-ctl --list-devices
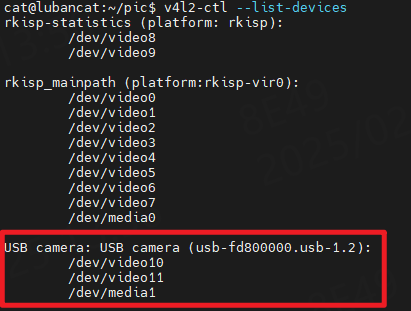
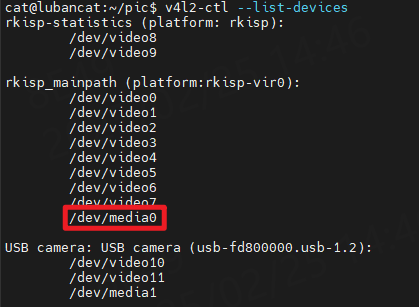
/dev/video*:视频捕获设备节点/dev/media1:media子系统设备节点
3.2、查看摄像头支持的图像格式和分辨率
v4l2-ctl -d /dev/video10 --list-formats-ext
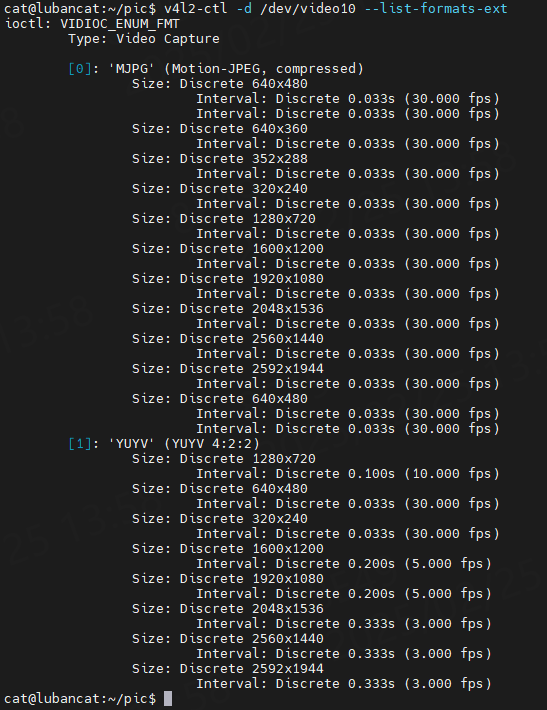
- 支持MJPG和YUYV两种图像格式。
3.3、设置图像格式和分辨率
v4l2-ctl -d /dev/video0 --set-fmt-video=width=640,height=480,pixelformat=MJPG
v4l2-ctl -d /dev/video0 --set-parm=30
width, height:分辨率pixelformat:图像格式
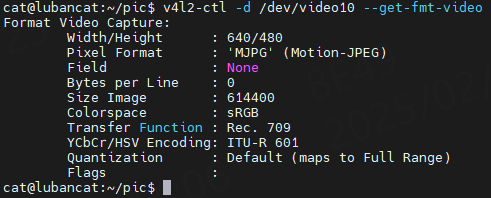
3.4、确认图像格式和分辨率
v4l2-ctl -d /dev/video10 --get-fmt-video
3.5、采集一帧图像
# 采集一帧图像
v4l2-ctl --verbose -d /dev/video10 --stream-mmap=4 --stream-skip=3 --stream-count=1 --stream-to=./01.jpg --stream-poll
# 采集一帧图像,同时指定图像格式和分辨率
v4l2-ctl --verbose -d /dev/video10 --set-fmt-video=width=640,height=480,pixelformat=MJPG --stream-mmap=4 --stream-skip=3 --stream-count=1 --stream-to=./01.jpg --stream-poll
4、采集MIPI摄像头数据
在Linux中,MIPI摄像头的通路相对复杂,因为MIPI摄像头涉及到传感器Sensor、硬件接口、ISP等多个模块。
对于内核中的MIPI摄像头驱动框架来说,引入了media子系统来管理各个entity。在应用层,可以使用media-ctl工具来操作和查询媒体控制器的拓扑结构,包括实体(entities)、接口(pads)和链接(links)。
下面以RK3566和MIPI OV8858摄像头举例。
4.1、查看MIPI摄像头的media节点
v4l2-ctl --list-devices
4.2、查看媒体控制器的拓扑结构
4.2.1、命令行查看拓扑结构
media-ctl -p -d /dev/media0
-p:打印媒体控制器的拓扑结构,包括实体、接口和链接。-d /dev/media0:指定媒体控制器的设备节点为/dev/media0。
Media controller API version 5.10.198
Media device information
------------------------
driver rkisp-vir0
model rkisp0
serial
bus info
hw revision 0x0
driver version 5.10.198
Device topology
- entity 1: rkisp-isp-subdev (4 pads, 8 links)
type V4L2 subdev subtype Unknown flags 0
device node name /dev/v4l-subdev0
pad0: Sink
[fmt:SBGGR10_1X10/3264x2448 field:none
crop.bounds:(0,0)/3264x2448
crop:(0,0)/3264x2448]
<- "rkisp-csi-subdev":1 [ENABLED]
<- "rkisp_rawrd0_m":0 []
<- "rkisp_rawrd2_s":0 []
pad1: Sink
<- "rkisp-input-params":0 [ENABLED]
pad2: Source
[fmt:YUYV8_2X8/3264x2448 field:none colorspace:smpte170m quantization:full-range
crop.bounds:(0,0)/3264x2448
crop:(0,0)/3264x2448]
-> "rkisp_mainpath":0 [ENABLED]
-> "rkisp_selfpath":0 [ENABLED]
-> "rkisp_iqtool":0 [ENABLED]
pad3: Source
-> "rkisp-statistics":0 [ENABLED]
- entity 6: rkisp-csi-subdev (6 pads, 5 links)
type V4L2 subdev subtype Unknown flags 0
device node name /dev/v4l-subdev1
pad0: Sink
[fmt:SBGGR10_1X10/3264x2448 field:none]
<- "rockchip-csi2-dphy1":1 [ENABLED]
pad1: Source
[fmt:SBGGR10_1X10/3264x2448 field:none]
-> "rkisp-isp-subdev":0 [ENABLED]
pad2: Source
-> "rkisp_rawwr0":0 [ENABLED]
pad3: Source
pad4: Source
-> "rkisp_rawwr2":0 [ENABLED]
pad5: Source
-> "rkisp_rawwr3":0 [ENABLED]
- entity 13: rkisp_mainpath (1 pad, 1 link)
type Node subtype V4L flags 0
device node name /dev/video0
pad0: Sink
<- "rkisp-isp-subdev":2 [ENABLED]
- entity 19: rkisp_selfpath (1 pad, 1 link)
type Node subtype V4L flags 0
device node name /dev/video1
pad0: Sink
<- "rkisp-isp-subdev":2 [ENABLED]
- entity 25: rkisp_rawwr0 (1 pad, 1 link)
type Node subtype V4L flags 0
device node name /dev/video2
pad0: Sink
<- "rkisp-csi-subdev":2 [ENABLED]
- entity 31: rkisp_rawwr2 (1 pad, 1 link)
type Node subtype V4L flags 0
device node name /dev/video3
pad0: Sink
<- "rkisp-csi-subdev":4 [ENABLED]
- entity 37: rkisp_rawwr3 (1 pad, 1 link)
type Node subtype V4L flags 0
device node name /dev/video4
pad0: Sink
<- "rkisp-csi-subdev":5 [ENABLED]
- entity 43: rkisp_iqtool (1 pad, 1 link)
type Node subtype V4L flags 0
device node name /dev/video5
pad0: Sink
<- "rkisp-isp-subdev":2 [ENABLED]
- entity 49: rkisp_rawrd0_m (1 pad, 1 link)
type Node subtype V4L flags 0
device node name /dev/video6
pad0: Source
-> "rkisp-isp-subdev":0 []
- entity 55: rkisp_rawrd2_s (1 pad, 1 link)
type Node subtype V4L flags 0
device node name /dev/video7
pad0: Source
-> "rkisp-isp-subdev":0 []
- entity 61: rkisp-statistics (1 pad, 1 link)
type Node subtype V4L flags 0
device node name /dev/video8
pad0: Sink
<- "rkisp-isp-subdev":3 [ENABLED]
- entity 67: rkisp-input-params (1 pad, 1 link)
type Node subtype V4L flags 0
device node name /dev/video9
pad0: Source
-> "rkisp-isp-subdev":1 [ENABLED]
- entity 73: rockchip-csi2-dphy1 (2 pads, 2 links)
type V4L2 subdev subtype Unknown flags 0
device node name /dev/v4l-subdev2
pad0: Sink
[fmt:SBGGR10_1X10/3264x2448@10000/230000 field:none]
<- "m00_b_ov8858 1-0036":0 [ENABLED]
pad1: Source
-> "rkisp-csi-subdev":0 [ENABLED]
- entity 76: m00_b_ov8858 1-0036 (1 pad, 1 link)
type V4L2 subdev subtype Sensor flags 0
device node name /dev/v4l-subdev3
pad0: Source
[fmt:SBGGR10_1X10/3264x2448@10000/230000 field:none]
-> "rockchip-csi2-dphy1":0 [ENABLED]
以entity 76为例:
- entity 76: m00_b_ov8858 1-0036 (1 pad, 1 link)
type V4L2 subdev subtype Sensor flags 0
device node name /dev/v4l-subdev3
pad0: Source
[fmt:SBGGR10_1X10/3264x2448@10000/230000 field:none]
-> "rockchip-csi2-dphy1":0 [ENABLED]
entity 76:代表一个实体,实体名为:m00_b_ov8858 1-0036。该实体有1个pad,1个link。pad0: Source:pad代表端口,Source表明该端口为输出端口,如果是Sink则表明为输入端口。-> "rockchip-csi2-dphy1":0:该端口连接至实体“rockchip-csi2-dphy1”的pad0。
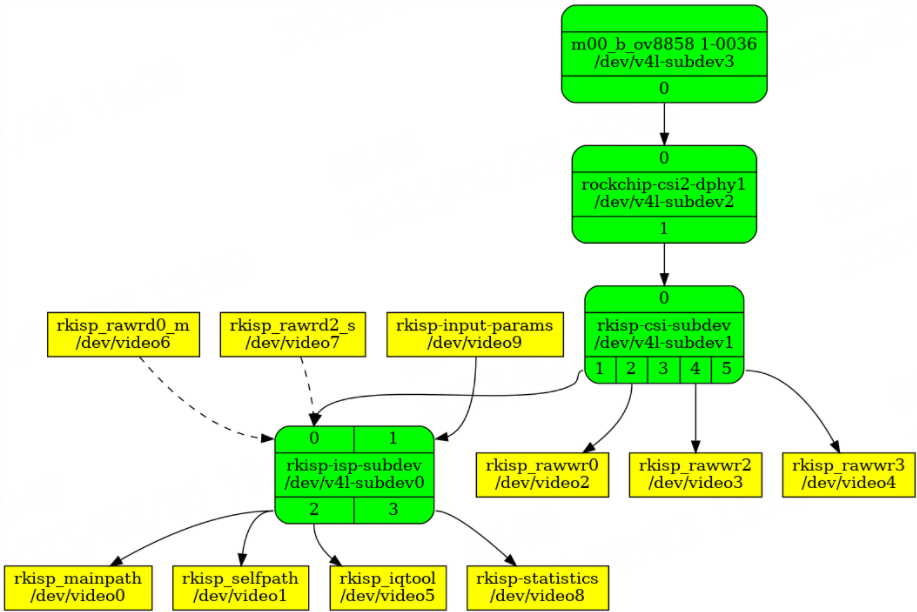
4.2.2、生成拓扑图
将拓扑结构以Graphviz的.dot格式输出到文件media0.dot:
media-ctl -d /dev/media0 --print-dot > media0.dot
安装Graphviz工具:
sudo apt install graphviz
使用Graphviz将.dot文件转换为PNG图片:
dot -Tpng media0.dot -o media0.png
4.3、配置链路
4.3.1、使能或关闭Sensor连接
关闭摄像头连接:
media-ctl -l '"m00_b_ov8858 1-0036":0 -> "rockchip-csi2-dphy1":0 [0]'
-l:启用或禁用链接。[0]:0关闭,1使能。

使能摄像头连接:
media-ctl -l '"m00_b_ov8858 1-0036":0 -> "rockchip-csi2-dphy1":0 [1]'

4.3.2、设置路由
命令格式如下,这里暂不需要所以不演示:
media-ctl -r '"<source_entity>":<source_pad> -> "<sink_entity>":<sink_pad> [enable]'
4.4、video节点确认
MIPI摄像头对应的video节点为:video0、video1。
知道video节点后,剩下的操作都和操作UVC摄像头一样。
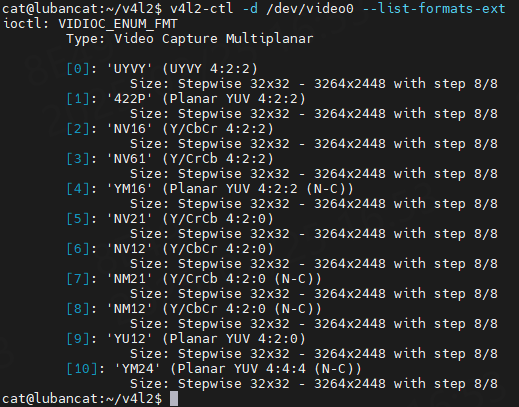
4.5、查看摄像头支持的图像格式和分辨率
v4l2-ctl -d /dev/video0 --list-formats-ext
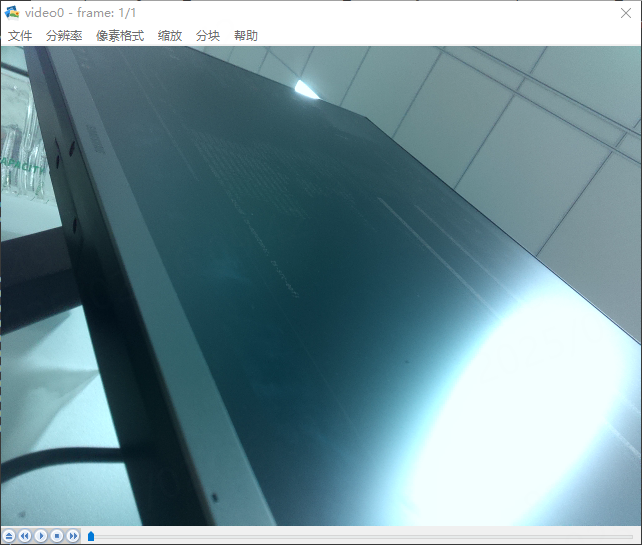
4.6、采集一帧图像
v4l2-ctl --verbose -d /dev/video0 --set-fmt-video=width=640,height=480,pixelformat=NV21 --stream-mmap=4 --stream-skip=3 --stream-count=1 --stream-to=./video0.yuv --stream-poll
windows下使用yuv player.exe软件查看图像:
5、总结
参考文章:


















 3106
3106

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









