



飞行类型
enum TARGET_TYPE
{
MANUAL_TARGET = 1,
PRESET_TARGET = 2,
REFENCE_PATH = 3
};
target_type_ == TARGET_TYPE::PRESET_TARGET)
trigger_sub_ = nh.subscribe("/traj_start_trigger", 1, &EGOReplanFSM::triggerCallback, this);
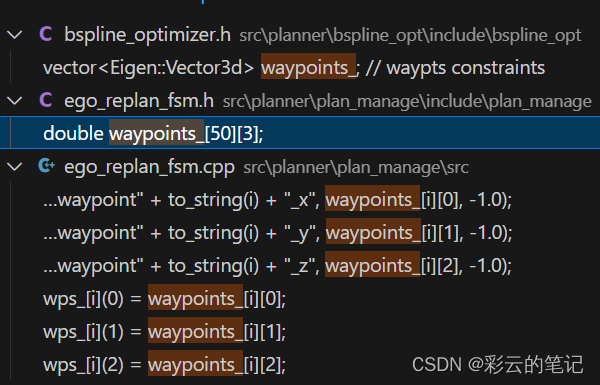
nh.param("fsm/waypoint_num", waypoint_num_, -1);
for (int i = 0; i < waypoint_num_; i++)
{
nh.param("fsm/waypoint" + to_string(i) + "_x", waypoints_[i][0], -1.0);
nh.param("fsm/waypoint" + to_string(i) + "_y", waypoints_[i][1], -1.0);
nh.param("fsm/waypoint" + to_string(i) + "_z", waypoints_[i][2], -1.0);
}
<arg name="point_num" value="1" />
<arg name="point0_x" value="15" />
<arg name="point0_y" value="0" />
<arg name="point0_z" value="1" />
<arg name="point1_x" value="0.0" />
<arg name="point1_y" value="0.0" />
<arg name="point1_z" value="1.0" />
<arg name="point2_x" value="15.0" />
<arg name="point2_y" value="0.0" />
<arg name="point2_z" value="1.0" />
<arg name="point3_x" value="0.0" />
<arg name="point3_y" value="0.0" />
<arg name="point3_z" value="1.0" />
<arg name="point4_x" value="15.0" />
<arg name="point4_y" value="0.0" />
<arg name="point4_z" value="1.0" />
由原代码知道,点数目是最大是50。

















 1157
1157

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









