






 本文深入探讨一种解决特定类型动态规划问题的高效算法——区间分块DP。通过实例讲解了如何利用线段树和散点修改技巧优化复杂度,实现快速求解区间内元素出现次数限制的方案数量。适用于大数据量的序列处理,如长度为10^5的数组操作。
本文深入探讨一种解决特定类型动态规划问题的高效算法——区间分块DP。通过实例讲解了如何利用线段树和散点修改技巧优化复杂度,实现快速求解区间内元素出现次数限制的方案数量。适用于大数据量的序列处理,如长度为10^5的数组操作。
题目描述:
给出长度为n(1≤n≤105)n(1≤n≤10^5)n(1≤n≤105)的数组a(ai≤n)a(a_i≤n)a(ai≤n)。给出1≤k≤n1≤k≤n1≤k≤n,求把这个序列分成若干块的方案,使得对于每个区间,只出现一次的数字不超过k kk个。
题目分析:
O(n2)O(n^2)O(n2)的DP很显然f[i]=∑f[j−1],j满足[j,i]中只出现一次的数≤kf[i]=\sum f[j-1],j满足[j,i]中只出现一次的数\le kf[i]=∑f[j−1],j满足[j,i]中只出现一次的数≤k
考虑如何快速得到f[j−1]f[j-1]f[j−1]的和,从后往前看,把数第一次出现的位置+1,第二次出现的位置-1,那么后缀和就表示[j,i][j,i][j,i]中只出现一次的数的个数。
假设已经求出了f[i]f[i]f[i],考虑新加入的ai+1a_{i+1}ai+1对后缀和的影响。
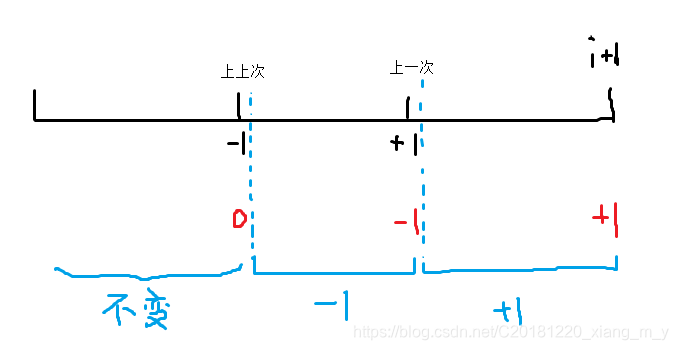
就是一个区间修改+1或-1,修改之后统计满足条件的f的和。
线段树不好处理<=k的问题,考虑分块。
需要记录s[块][后缀和]s[块][后缀和]s[块][后缀和]表示第几个块后缀和为几的f值的和,cnt[n]cnt[n]cnt[n]表示每个位置的后缀和,tag[块]tag[块]tag[块]表示整块修改的标记。
整块修改需要改ans(把s中后缀和在k边界的部分加上或减去)和tag。
散点修改需要改ans和s,先去掉贡献,修改cnt之后再加上贡献。
注意访问后缀和为k的f和,实际上需要访问s[][k−tag+O]s[][k-tag+O]s[][k−tag+O],由于cnt可能为负,所以加上O(=n)的偏移量。
Code:
#include <bits/stdc++.h>
#define maxn 100005
#define S 330
using namespace std;
const int mod = 998244353;
int n,k,a[maxn],pre[maxn],last[maxn];
int s[maxn/S+5][maxn<<1],O,tag[maxn/S+5],cnt[maxn],f[maxn],bel[maxn],ans;
inline void add(int &x,int y){x+=y+(x+y>=mod?-mod:0);}
void ins(int u,int v){
add(ans,v),add(s[bel[u]][cnt[u]+O],v);
}
void mdf(int u,int v){//单点修改
if(cnt[u]+tag[bel[u]]<=k) add(ans,mod-f[u-1]);
add(s[bel[u]][cnt[u]+O],mod-f[u-1]);
cnt[u]+=v;
if(cnt[u]+tag[bel[u]]<=k) add(ans,f[u-1]);
add(s[bel[u]][cnt[u]+O],f[u-1]);
}
void Modify(int L,int R,int v){
if(L>R) return;
if(bel[L]+1>=bel[R])
for(int i=L;i<=R;i++) mdf(i,v);
else{
for(int i=L;i<=bel[L]*S;i++) mdf(i,v);
for(int i=(bel[R]-1)*S+1;i<=R;i++) mdf(i,v);
for(int i=bel[L]+1;i<bel[R];i++){//整块修改
if(v==1) add(ans,mod-s[i][k-tag[i]+O]);
else add(ans,s[i][k+1-tag[i]+O]);
tag[i]+=v;
}
}
}
int main()
{
scanf("%d%d",&n,&k);
for(int i=1;i<=n;i++) scanf("%d",&a[i]),pre[i]=last[a[i]],last[a[i]]=i;
for(int i=1;i<=n;i++) bel[i]=(i-1)/S+1;
f[0]=1,ins(1,1);
for(int i=1;i<=n;i++){
Modify(pre[i]+1,i,1);
Modify(pre[pre[i]]+1,pre[i],-1);
ins(i+1,f[i]=ans);//需要把f[i]加入贡献中
}
printf("%d\n",f[n]);
}

















 568
568

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









