




原文信息
原文标题:“Super-Large Field-of-View, High-Accurate and Real-Time 3D Scene Reconstruction Based on Metasurface-Enabled Structured Light”
第一作者:Zhengren Zhan
通讯作者:Zhengren Zhan
三维场景重建主流技术对比分析
光学技术在传感探测领域中具有核心地位,而三维场景重建(即构建真实空间数字模型)的实现主要依赖三类技术,各技术的原理与局限如下:
1.纯视觉技术:通过摄像机采集目标场景的多视角图像,利用图像与现实空间的几何关系提取深度值,再经特征匹配与点云拼接获取全场景三维信息。但其短板在于摄像机对光照条件敏感,易导致深度信息精度不足。
2.激光雷达(LIDAR)技术:通过测量激光脉冲的发射 - 接收时间间隔,计算目标的距离、角度等参数。该技术需依赖复杂的系统结构,此前文献中已提及超表面在激光雷达系统中的应用可实现体积缩减。
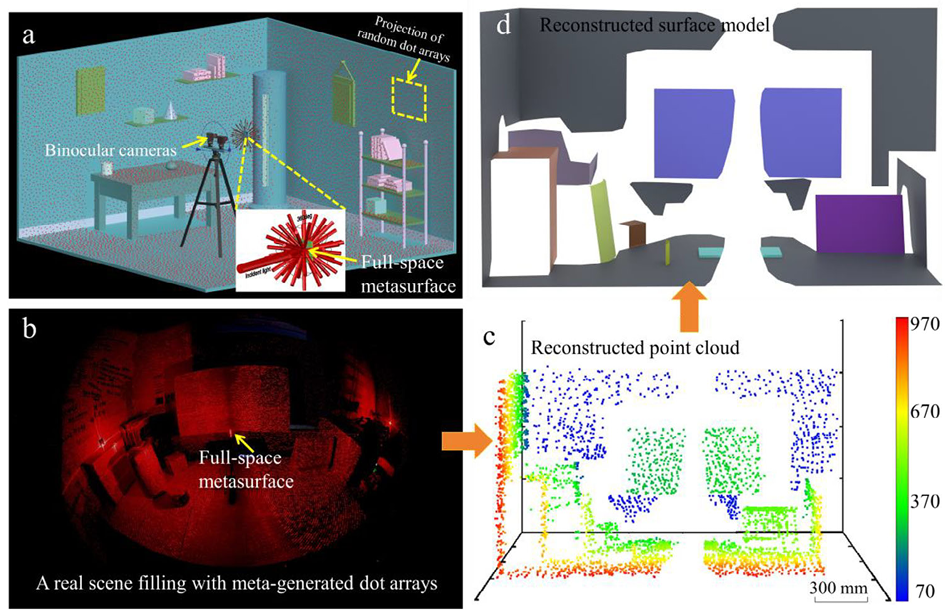
3.结构光技术:伴随衍射光学的发展,该技术可无需机械扫描直接在空间生成随机点阵,有效弥补纯视觉与激光雷达的技术短板。但当前结构光技术仍面临系统厚度大、视场角小的关键问题。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 502
502

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









