




机械元件的杂散光分析
简介
在光学系统设计与工程实践中,机械元件的杂散光问题对系统性能有着不容忽视的影响。杂散光会降低光学系统的信噪比、图像对比度,甚至导致系统功能失效。因此,准确分析机械元件杂散光并采取有效抑制措施,是保障光学系统高质量运行的关键环节。OAS 光学软件凭借其强大的光学仿真与分析功能,为机械元件杂散光分析提供了先进且高效的解决方案,本案例基于此展开,旨在展示 OAS 软件在该领域的实际应用价值与卓越性能。
模型构建
利用OAS软件的机械建模功能,对目标光学系统的机械结构进行精确建模。该机械结构主要包含镜筒、隔环等关键部件,这些部件的形状、尺寸及相对位置关系均依据实际工程图纸进行构建。通过软件直观的建模界面,采用参数化建模方式,确保模型能够真实反映机械结构的几何特征,为后续杂散光分析奠定坚实基础。
光源设置
在膜层特性方面,将膜层设定为恒定色散模式,光线透射率精确设置为 95%,此设定符合该机械结构在实际应用中的光学性能要求,有效模拟光线在表面的透射行为。同时,在散射特性设置上,采用 Lambertian 散射模型,该模型能够合理描述机械结构表面光线散射的统计规律,为准确模拟杂散光分布提供可靠依据。

(机械元件杂散光分析的三维追迹图)
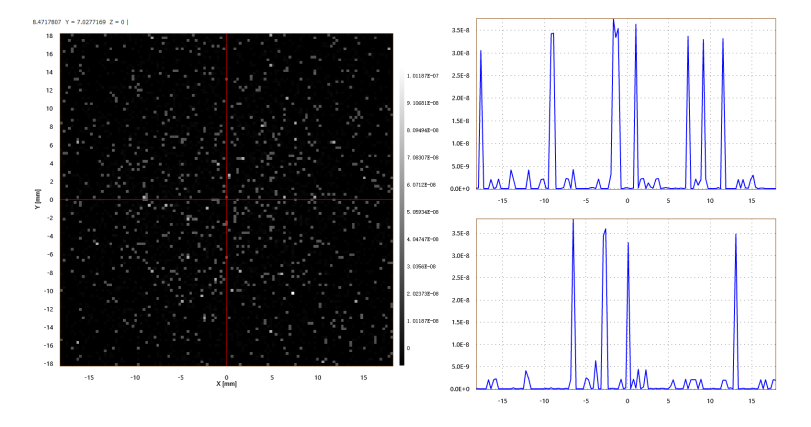
(机械元件杂散光分析的探测器结果图)
总结
本案例通过 OAS 光学软件成功实现对机械元件杂散光的精准分析,验证了该软件在光学系统杂散光分析领域的有效性与可靠性。基于分析结果,工程人员能够针对性地优化机械结构设计、调整光学参数,采取如改进表面处理工艺、优化隔环布局等有效措施抑制杂散光,从而提升光学系统的整体性能与可靠性。该案例的成功应用,不仅为类似光学系统的杂散光分析提供了可借鉴的实践经验,也进一步彰显了 OAS 光学软件在光学工程领域的重要应用价值与技术优势。

















 303
303

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









