




 本文详细介绍了电机控制中的原点指令(ZRN/DZRN)和带搜索的原点回归指令(DSZR),包括指令形式、运行过程以及特殊辅助继电器和输出模块的作用。
本文详细介绍了电机控制中的原点指令(ZRN/DZRN)和带搜索的原点回归指令(DSZR),包括指令形式、运行过程以及特殊辅助继电器和输出模块的作用。
目录
一、简介
用于将电机或伺服驱动器控制的轴回到预定的原点位置(原点位置由接近开关等提供信号,可以通过代码编程指定)。原点指令有不带DOG搜索和带DOG搜索两种。
二、指令形式
1、原点指令[ZRN/DZRN]
[ZRN S1 S2 S3 Dn]
S1代表:指定开始原点回归的速度,1~32767 HZ
S2代表:指定爬行速度,1~32767 HZ
S3代表:指定输入近点信号(DOG)的输入编号的软元件编号,X0~Xn
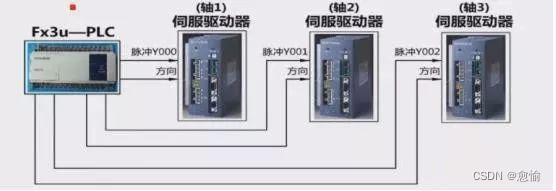
Dn代表:指定输出脉冲的输出编号,Y0~Y2
其中,DZRN是32位的操作指令,频率可达到最大频率100K HZ、
2、带搜索的原点回归指令[DSZR]
[DSZR S1 S2 Dn1 Dn2]
S1代表:指定输入近点信号(DOG)的输入编号的软元件编号,X0~Xn
S2代表:指定输入原点信号的输入编号的软元件编号,X0~Xn
Dn1代表:指定输出脉冲的输出编号,Y0~Y2
Dn2代表:指定方向的输出软元件编号,Y0~Yn
其中,S1、S2可使用同一个信号输入;Dn2原则上只要是输出软元件即可,但是为了不占用高速脉冲输出通道,所以使用Y3以后的软元件比较合适。
三、回归指令运行过程
代码:

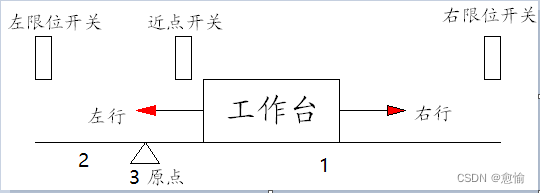
运行过程简易图:
1、ZRN原点回归运行过程
注:电机默认转动方向为向左
A、当工作台在1位置:
以原点回归速度左行—>工作台触发近点开关信号—>继续往前一段DOG信号—>以爬行速度往右行—>直到工作台刚好离开近点信号停止
B、当工作台在2位置:(需要指定运行方向):
以原点回归速度右行—>工作台触发近点开关信号—>继续往前一段DOG信号—>以爬行速度往左行—>直到工作台刚好离开近点信号停止
C、当工作台在近点开关下方:
以爬行速度向指定方向运行—>直到工作台离开近点信号停止
2、带搜索的原点回归运行过程
注:电机默认转动方向为向左;原点处也有一个开关信号
A、当工作台在1位置:
以原点回归速度左行—>工作台触发近点开关信号—>以爬行速度继续左行—>直到工作台触发原点信号停止
B、当工作台在2位置:
以原点回归速度左行—>工作台触发左限位开关后往右运行—>当工作台触发近点信号—>继续往前运行一个DOG信号—>以爬行速度往左运行—>直到工作台触发原点信号停止
C、当工作台在近点开关下方:
以爬行速度向原点信号运行—>直到工作台触发原点信号停止
四、特殊辅助继电器
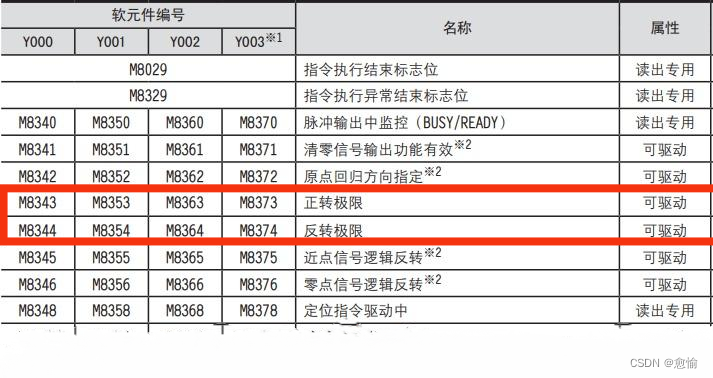
常用特殊辅助继电器:(以Y0输出为例)
M8342:可以使用这个辅助继电器改变电机正反转方向
M8343:对于带搜索的原点回归指令触发后会使电机往相反的方向运行;对于不带搜索的原点回归指令触发后电机停止工作。
注意:不同的输出软元件对同一个功能要使用不同的特殊辅助继电器
五、特殊输出模块
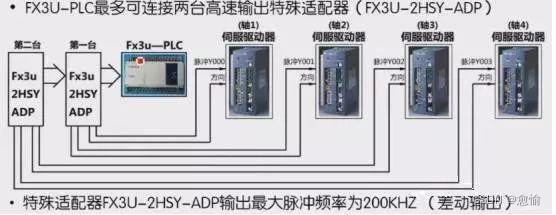
当使用这个特殊适配器后有两个作用:
第一个是可以将输出的频率有最高100KHZ提升到最高200KHZ
第二个是可以增加一个高速脉冲输出软元件Y3(本来FX3U基本单元只提供Y0、Y1、Y2三个)
六、总结
1、 使用带搜索的原点回归指令需要在Works2中设置原点速度和爬行速度。
2、可以通过指令内设定电机运行方向,也可以通过特殊辅助寄存器进行设置。
3、电机的默认运行方向需要关注。


















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









