



 本文详细介绍了如何使用IGT-DSER智能网关通过GET和POST命令与PLC进行数据交互,包括配置过程、PLC类型支持和边缘计算功能。
本文详细介绍了如何使用IGT-DSER智能网关通过GET和POST命令与PLC进行数据交互,包括配置过程、PLC类型支持和边缘计算功能。
智能网关IGT-DSER集成了多种PLC协议,方便实现各种PLC与HTTP服务端之间通讯。通过网关的参数配置软件绑定JSON文件的字段与PLC寄存器地址,配置URL,即可采用POST命令,将JSON文件提交给HTTP的服务端; 服务端有返回的JSON,或者GET命令获取到的JSON,网关进行解析后将数据写入到PLC寄存器。
本文主要描述通过GET命令获取数据,解析到西门子PLC的寄存器,以下服务端发送的测试JSON文件:POST方法的相关案例

运行网关的参数配置软件(下载地址),通过(功能->数据上报与平台对接),选HTTP-GET/POST页面,根据PLC通讯地址,寄存器数量等参照案例配置好相关参数后下载重启(参数->参数写入到网关)、(工具->重启网关);通过网关的参数配置软件读取网关参数(参数->从网关读取参数)后,看软件上显示的状态消息;根据状态消息调试。
以下是根据JSON文件配置的相关参数,以及IGT-DSER的状态消息和数据监控:
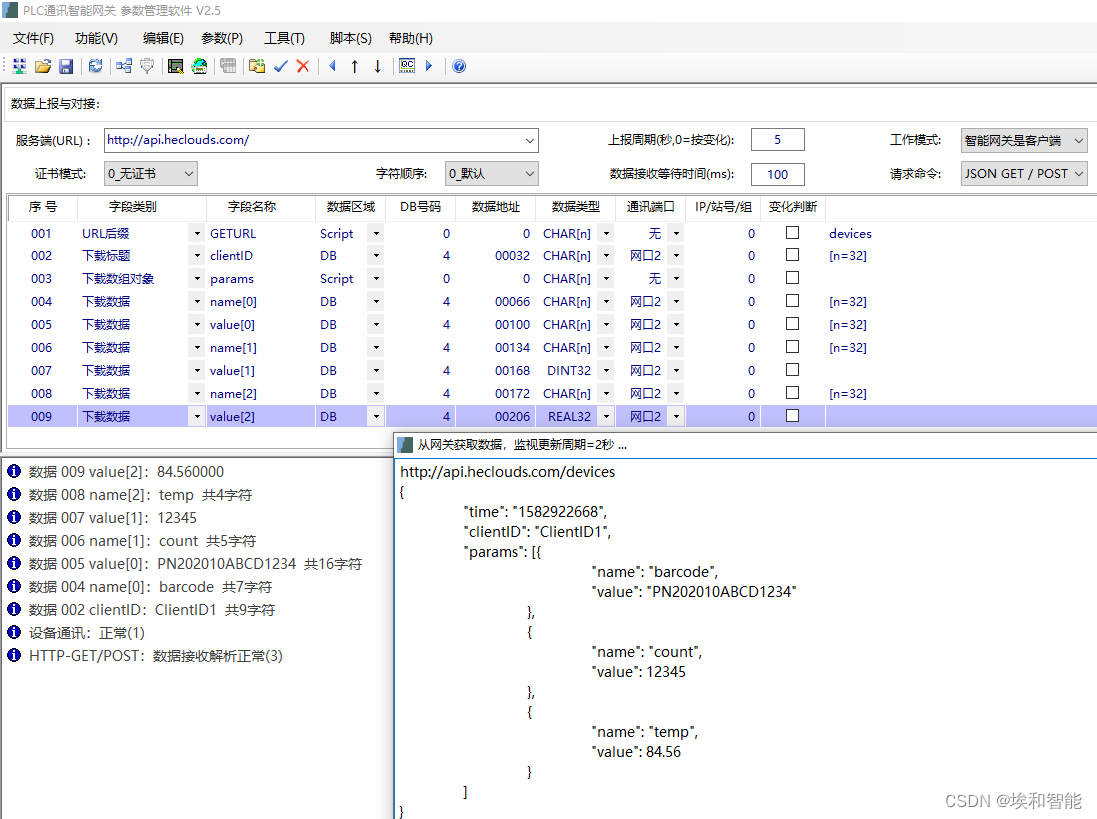
鼠标双击数据配置表对应的'序号',消息栏会显示该数据的当前值。如果显示的数值正确无误,可通过的编程软件监视相关寄存器地址的数据,如下图:

IGT-DSER网关模块也支持边缘计算,可以将数据进行预处理后上报和下载,也方便实现各种非标协议的通讯,具体可查看网关的脚本手册。
智能网关集成了多种PLC协议,以下是常用的PLC类型:
◆ FX: 三菱FX系列PLC ◆ QL: 三菱Q/L/R系列PLC
◆ AS: 三菱A系列PLC ◆ OM: 欧姆龙全系列PLC
◆ S72S: 西门子S7-200/Smart系列PLC ◆ S734: 西门子S7-300/400系列PLC
◆ S71K: 西门子S7-1200/1500系列PLC ◆ MBS: 施耐德等Modbus兼容PLC
◆ DVP: 台达、信捷PLC ◆ NAIS: 松下全系列PLC
◆ KVS: 基恩士全系列PLC ◆ FTK: 永宏/丰炜PLC
◆ FNC: 发那科数控/机器人的PMC系统 ◆ TPC: 丰田工机PC2/PC3系列
◆ ABM: AB MicroLogix系列PLC ◆ ABC: AB Compact/Control系列PLC
◆ INO: 汇川全系列PLC ◆ GE: GE PAC/PLC系统


















 381
381

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









