




 Doob的鞅不等式是概率论中的一个重要结果,它给出了子鞅在给定时间区间内超过任意值的概率的上界。这个不等式不仅适用于鞅,也适用于子鞅。在离散时间与连续时间的设置中,文章证明了这一不等式,并指出它对样本路径的最大值提供了控制。此外,还提到了其在布朗运动等随机过程中的应用。
Doob的鞅不等式是概率论中的一个重要结果,它给出了子鞅在给定时间区间内超过任意值的概率的上界。这个不等式不仅适用于鞅,也适用于子鞅。在离散时间与连续时间的设置中,文章证明了这一不等式,并指出它对样本路径的最大值提供了控制。此外,还提到了其在布朗运动等随机过程中的应用。
1 Doob’s martingale maximal inequalities
1.1
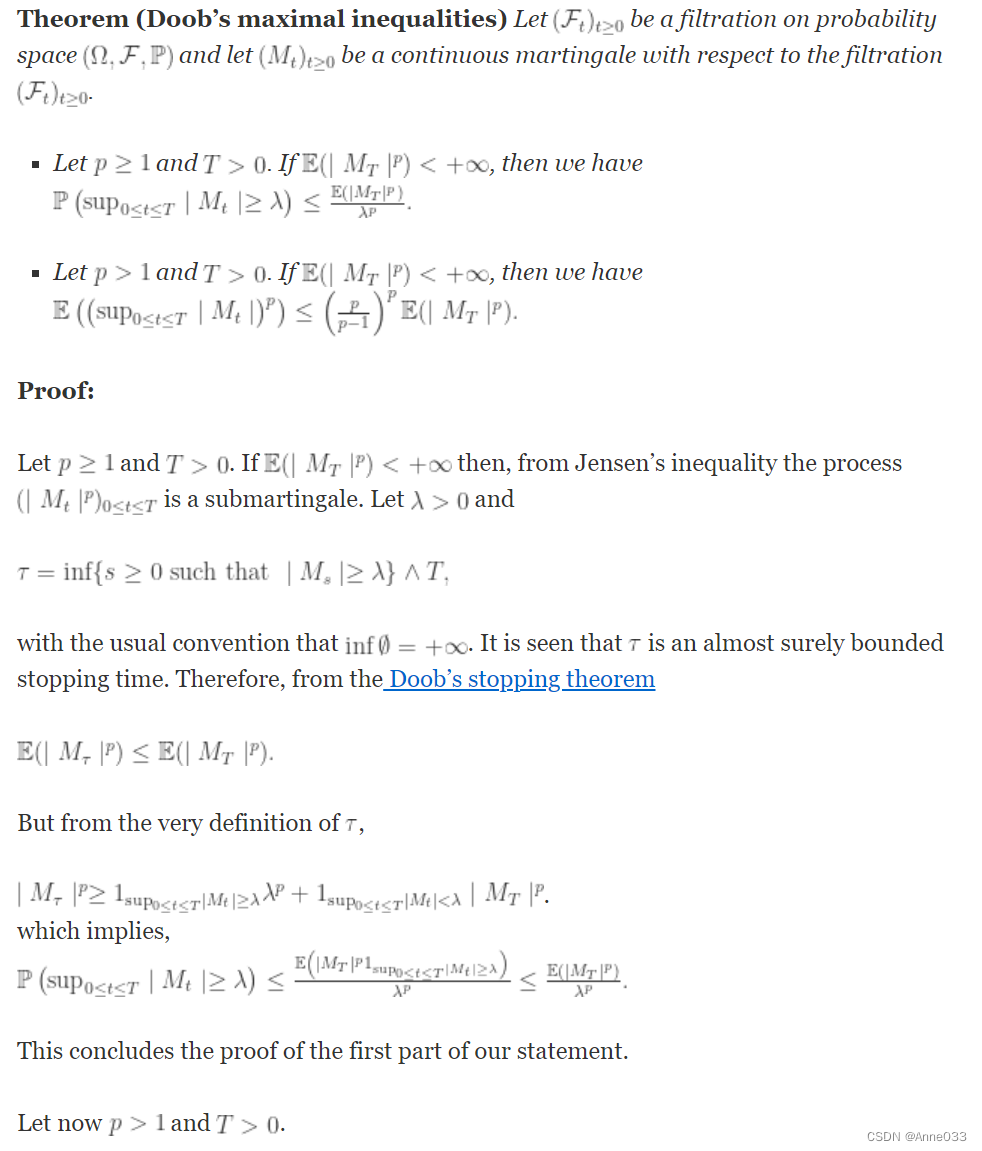
In this post, we prove some fundamental martingale inequalities that, once again, are due to Joe Doob

https://fabricebaudoin.wordpress.com/2012/04/10/lecture-11-doobs-martingale-maximal-inequalities/
1.2
In mathematics, Doob’s martingale inequality, also known as Kolmogorov’s submartingale inequality is a result in the study of stochastic processes. It gives a bound on the probability that a submartingale exceeds any given value over a given interval of time. As the name suggests, the result is usually given in the case that the process is a martingale, but the result is also valid for submartingales.
The inequality is due to the American mathematician Joseph L. Doob.
Statement of the inequality
The setting of Doob’s inequality is a submartingale relative to a filtration of the underlying probability space. The probability measure on the sample space of the martingale will be denoted by P. The corresponding expected value of a random variable X, as defined by Lebesgue integration, will be denoted by E[X].
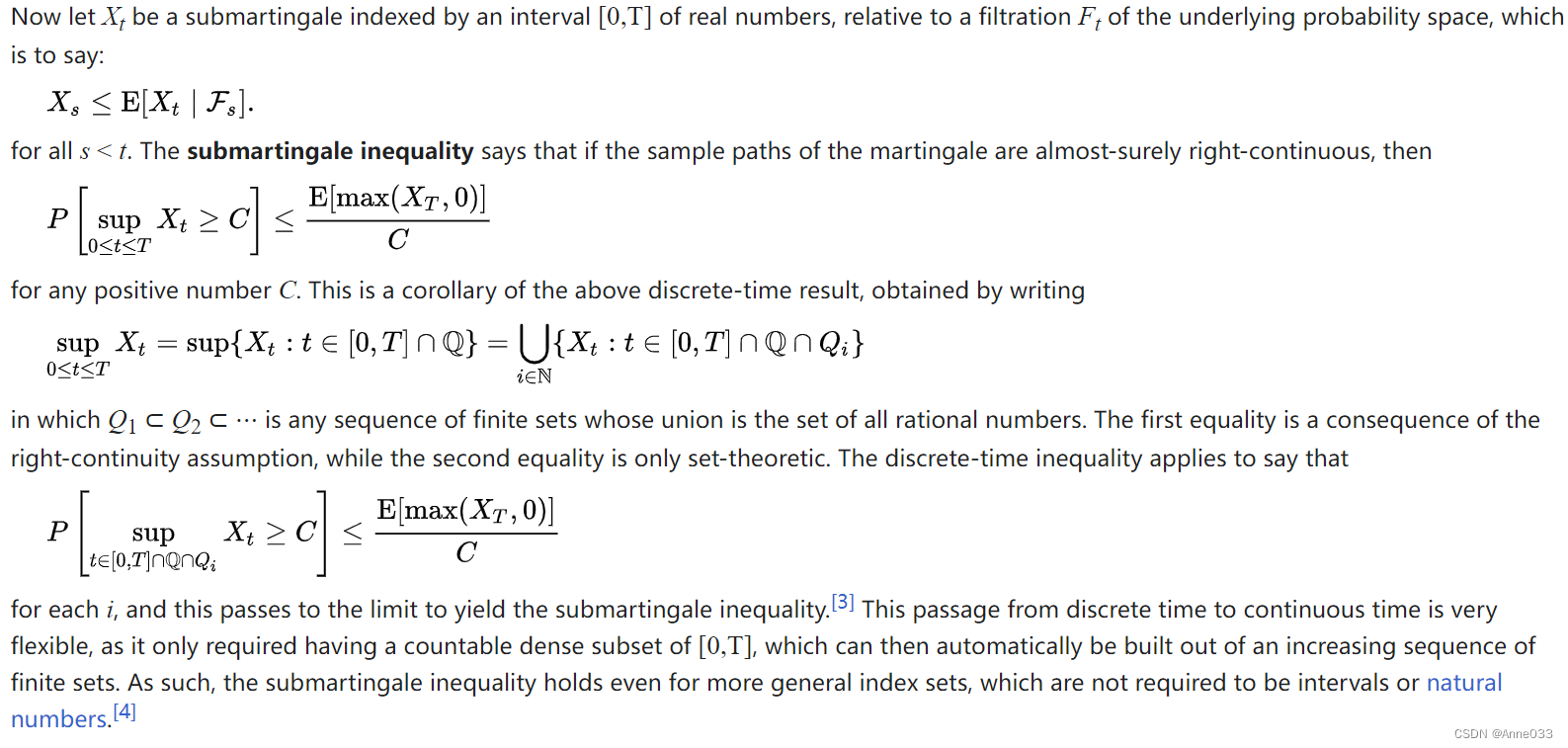
Informally, Doob’s inequality states that the expected value of the process at some final time controls the probability that a sample path will reach above any particular value beforehand. As the proof uses very direct reasoning, it does not require any restrictive assumptions on the underlying filtration or on the process itself, unlike for many other theorems about stochastic processes. In the continuous-time setting, right-continuity (or left-continuity) of the sample paths is required, but only for the sake of knowing that the supremal value of a sample path equals the supremum over an arbitrary countable dense subset of times.
Discrete time
In this proof, the submartingale property is used once, together with the definition of conditional expectation.[1] The proof can also be phrased in the language of stochastic processes so as to become a corollary of the powerful theorem that a stopped submartingale is itself a submartingale.[2] In this setup, the minimal index i appearing in the above proof is interpreted as a stopping time.
Continuous time
Further inequalities
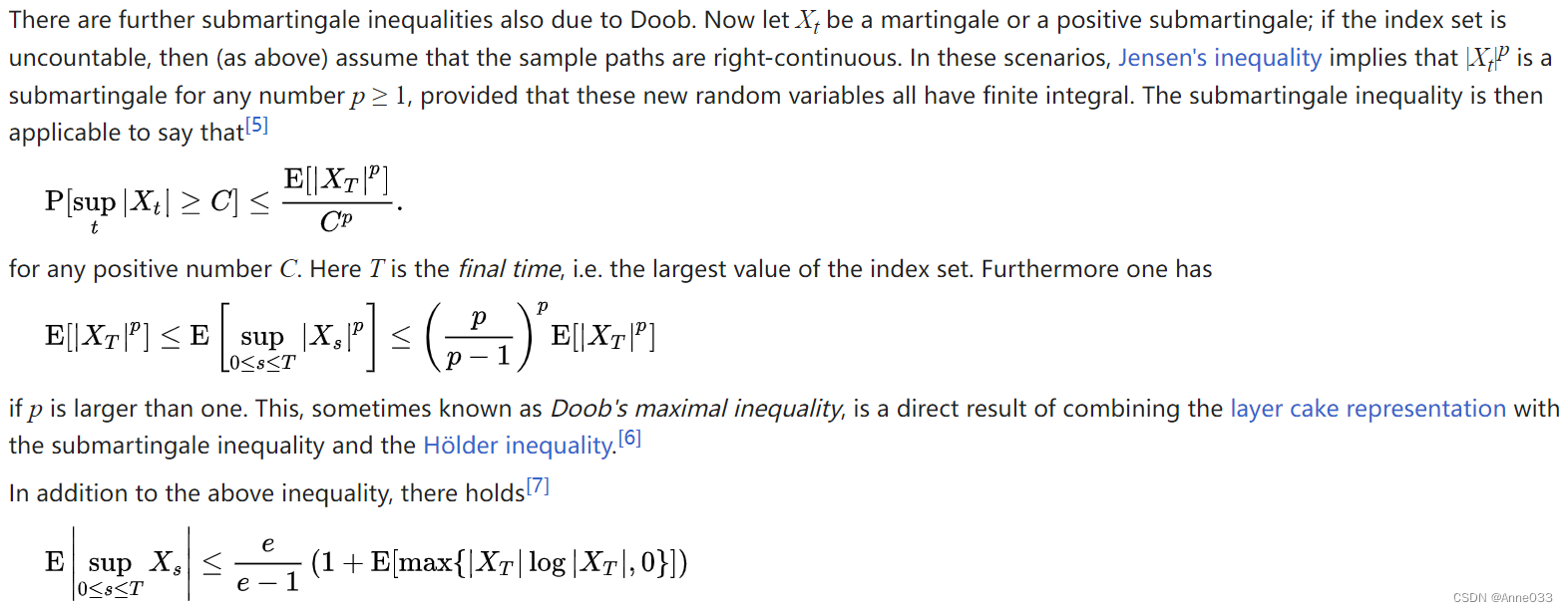
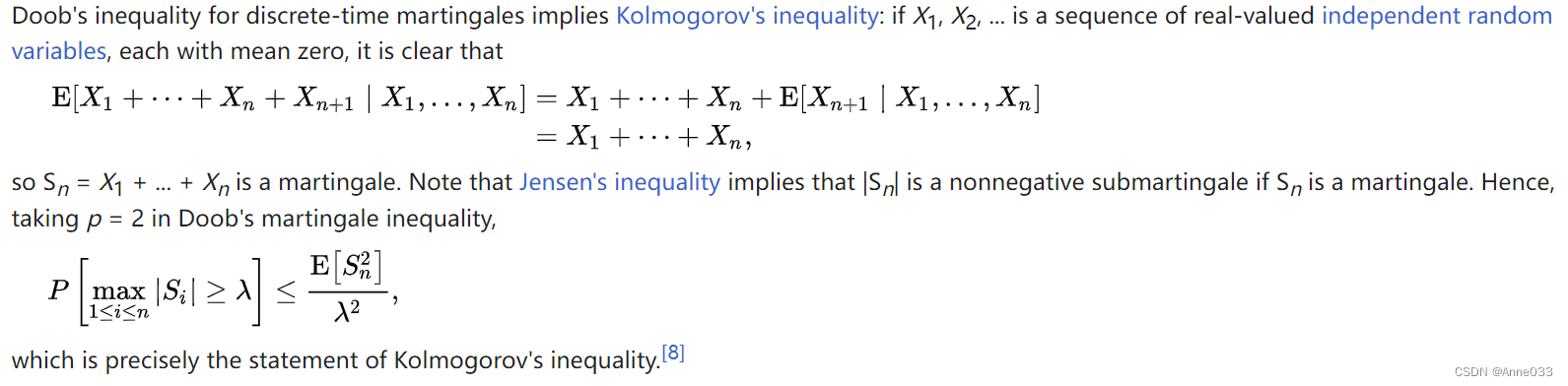
Related inequalities
Application: Brownian motion
https://en.wikipedia.org/wiki/Doob%27s_martingale_inequality


















 1272
1272

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









