



题目描述
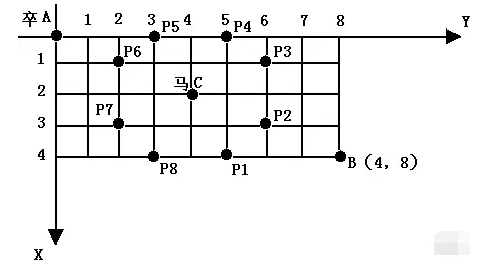
棋盘上 A 点有一个过河卒,需要走到目标 B 点。卒行走的规则:可以向下、或者向右。同时在棋盘上 C 点有一个对方的马,该马所在的点和所有跳跃一步可达的点称为对方马的控制点。因此称之为“马拦过河卒”。
棋盘用坐标表示,A 点 (0,0)、B 点 (n,m),同样马的位置坐标是需要给出的。
现在要求你计算出卒从 A 点能够到达 B 点的路径的条数,假设马的位置是固定不动的,并不是卒走一步马走一步。
输入格式
一行四个正整数,分别表示 B 点坐标和马的坐标。
输出格式
一个整数,表示所有的路径条数。
样例 #1
样例输入 #1
6 6 3 3
样例输出 #1
6
提示
对于 100% 的数据,1≤n,m≤20,0≤ 马的坐标 ≤20。
#include <iostream>
#include <algorithm>
using namespace std;
long long f[30][30];
int dis[8][2]={{1,2},{-1,2},{1,-2},{-1,-2},{2,1},{-2,1},{2,-1},{-2,-1}};
int main()
{
//输入
int n,m,mx,my;
cin>>n>>m>>mx>>my;
//初始化边界
f[0][0]=1;
//初始化“马”
f[mx][my]=-1;
for(int i=0;i<8;i++)
{
int x=mx+dis[i][0],y=my+dis[i][1];
if(x>=0&&x<=n&&y>=0&&y<=m)
f[x][y]=-1;
}
//遍历赋值
for(int i=0;i<=n;i++)
for(int j=0;j<=m;j++)
if(f[i][j]!=-1&&!(i==0&&j==0))
{
long long q=(i>0 ? max(0ll,f[i-1][j]) : 0);
long long w=(j>0 ? max(0ll,f[i][j-1]) : 0);
f[i][j]=q+w;
}
//输出
if(f[n][m]==-1)
cout<<0;
else
cout<<f[n][m];
return 0;
}
这道题是DP,小坑特别多,交了8遍才过!主要问题有:base,优先级,long long,等等,等等……主要难点在“遍历赋值”区。

















 1080
1080

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









