



前言:使用Ultralytics 8.1.34中yolov8n-seg进行训练,并到处onnx模型后,onnx模型精度对比pt文件有明显损失,具体表现为检测到的分割区域会出现缺少情况。如下图所示:
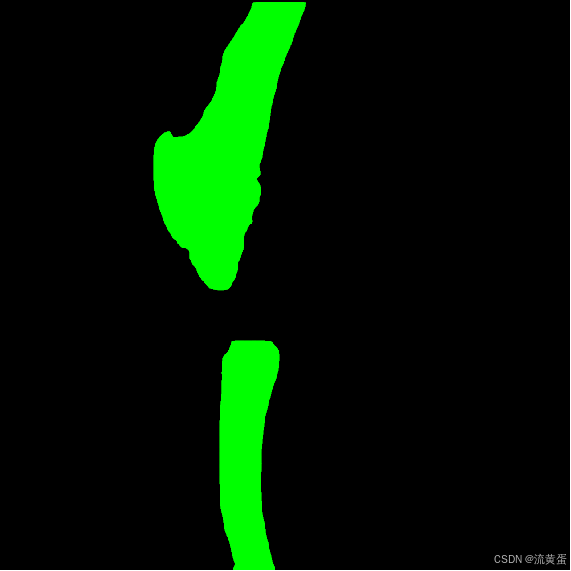
pt文件推理正常分割图片
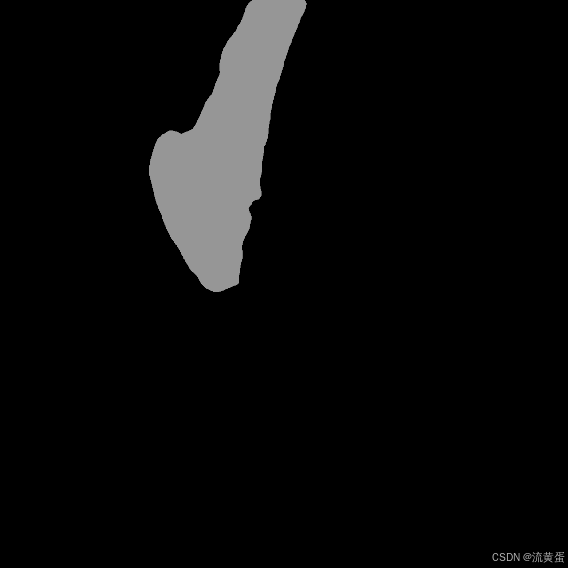
onnx模型推理分割图片
产生该问题原因(参考注释):
class Detect(nn.Module):
"""YOLOv8 Detect head for detection models."""
dynamic = False # force grid reconstruction
export = False # export mode
shape = None
anchors = torch.empty(0) # init
strides = torch.empty(0) # init
def __init__(self, nc=80, ch=()):
"""Initializes the YOLOv8 detection layer with specified number of classes and channels."""
super().__init__()
self.nc = nc # number of classes
self.nl = len(ch) # number of detection layers
self.reg_max = 16 # DFL channels (ch[0] // 16 to scale 4/8/12/16/20 for n/s/m/l/x)
self.no = nc + self.reg_max * 4 # number of outputs per anchor
self.stride = torch.zeros(self.nl) # strides computed during build
c2, c3 = max((16, ch[0] // 4, self.reg_max * 4)), max(ch[0], min(self.nc, 100)) # channels
self.cv2 = nn.ModuleList(
nn.Sequential(Conv(x, c2, 3), Conv(c2, c2, 3), nn.Conv2d(c2, 4 * self.reg_max, 1)) for x in ch
)
self.cv3 = nn.ModuleList(nn.Sequential(Conv(x, c3, 3), Conv(c3, c3, 3), nn.Conv2d(c3, self.nc, 1)) for x in ch)
self.dfl = DFL(self.reg_max) if self.reg_max > 1 else nn.Identity()
......
def decode_bboxes(self, bboxes, anchors):
"""Decode bounding boxes."""
if self.export:
return dist2bbox(bboxes, anchors, xywh=False, dim=1) # 导出onnx时xywh入参为False
return dist2bbox(bboxes, anchors, xywh=True, dim=1) # pt训练推理时xywh入参为True
def dist2bbox(distance, anchor_points, xywh=True, dim=-1):
"""Transform distance(ltrb) to box(xywh or xyxy)."""
assert(distance.shape[dim] == 4)
lt, rb = distance.split([2, 2], dim)
x1y1 = anchor_points - lt
x2y2 = anchor_points + rb
if xywh: # pt训练推理时的代码实现
c_xy = (x1y1 + x2y2) / 2
wh = x2y2 - x1y1
return torch.cat((c_xy, wh), dim) # xywh bbox
return torch.cat((x1y1, x2y2), dim) # 导出onnx时代码实现
xywh的入参不同导致模型结构出现不同,需要将入参部分全部置为True即可。


















 3071
3071

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









