




据观点网讯报道,11月18日,大疆确认投资消费级3D打印企业,投资金额未披露。大疆表示,此次出手基于对消费级3D打印技术潜力及行业增速的乐观判断,契合其对创新科技的一贯理念和前瞻性布局。
市场方面,3D打印行业目前正进入加速周期,美团、高翎等机构已相继布局。Wohlers Report 2025数据显示,2024年全球增材制造市场收入达到219亿美元。根据十年复合年均增长率18%计算,预计2030年市场规模将达到1150亿美元。
技术价值方面,消费级3D打印已从为工程师、创客提供实用价值,过渡到为普通消费者提供情绪价值阶段。
技术发展方面,消费级3D打印技术、材料和生态的发展极为迅速。设备好用、易用,材料环保、选择广泛,模型获取无门槛、创意实现无障碍(由AI催动)。
技术获取方面,设备、材料价格极大降低,一台好用设备的价格通常不高于一台常规手机。

在此背景之下,消费级3D打印赛道竞争异常激烈。但由于单材料打印技术已较为成熟,头部品牌的设备均可长时间稳定运行,对多色打印技术的进一步突破成为多家品牌研发的重点。在此方面,相关技术不断突破,创新时刻在发生。
从2022年开始,拓竹、创想三维、纵维立方等品牌推出了带有多色盒子的3D打印机,极大提升了消费者对3D打印机的使用乐趣,且设备价格越来越低。但该技术方案无法避免换色效率低、材料浪费严重的问题。

2025年,快造科技率先推出多工具头切换系统,快速收获了消费市场和资本市场的积极反馈。Snapmaker U1上线后获得了1.46亿元的众筹记录;随后,快造科技收获美团、高翎带来的融资。另外需要指出的是,这款产品面向的是普通消费者,价格可参考华为最新款手机标准版。

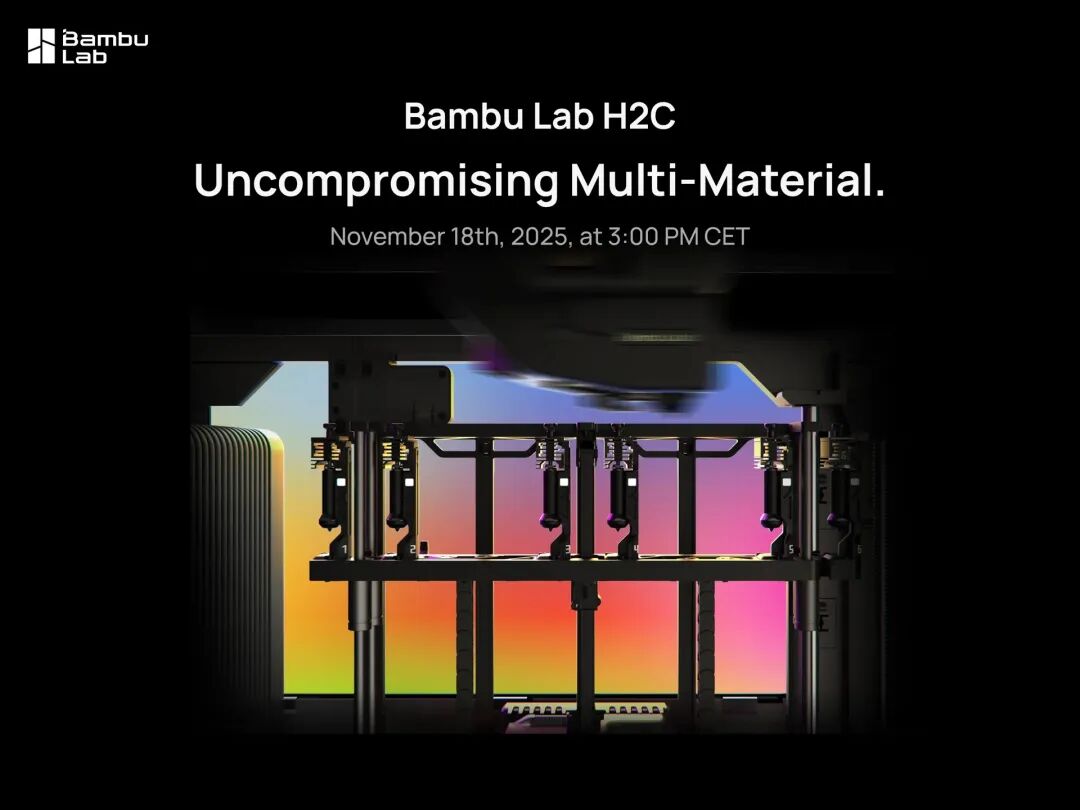
与之展开竞争的,是拓竹即将发布的H2C。其搭载最新研发的Vortek系统,配备1个升降热端 + 6个可更换电感热端,可实现7种材料/颜色的零吐料打印,同时还搭载其他多种先进科技。市场方面预测,H2C面向中高端市场,与Snapmaker U1可能并不会产生直接的竞争。
大疆入局无论是何种原因,都只会催动消费级3D打印技术更为快速的创新,更多低成本、好玩的3D打印技术将以更快的速度走进普通人生活。而行业竞争,也无可避免的进一步加剧。#增材制造 #3D打印
欢迎转发
延伸阅读:
1.中国团队把航空级碳纤维3D打印价格打到消费级!众筹正式开始!
2.中国航发3D打印发动机亮相迪拜;中科院力学所重要进展;Stratasys布局金属和陶瓷打印;我国“类器官”3D打印重要进展



















 834
834

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









