




在树脂3D打印(如 SLA、DLP、MSLA)广泛应用于高精度制造、医疗、珠宝等领域的当下,数据处理的复杂性一直是制约行业发展的关键瓶颈。传统流程中,模型修复、支撑设计等环节依赖大量手工操作,不仅效率低下,还易导致打印失败率高、后处理成本增加等问题。
VoxelDance Additive(VDA)凭借其完整的工作流和智能化的支撑套件,为SLA打印服务中心带来了效率提升的全新可能,实现了零件良品率100% 的突破。
采用单一支撑脚本
可能面临的问题
VDA提供完整的支撑套件,使用户能够方便快捷的为零件设计完善的支撑方案,然而在实际情况下,SLA打印服务中心每天需要处理大量的零件,且这些零件的几何特征各不相同,如果为每个零件详细的设计支撑方案,那么就需要工程师花费大量的时间逐个进行处理。
采用默认的自动支撑脚本可以一次性在这些零件表面生成支撑,但却存在一定的问题:
曲面的复杂曲率可能导致支撑无法覆盖所有需要支持的悬垂区域;
零件表面与打印平台的角度限制可能使支撑难以生成;
不同软件对复杂表面的处理能力差异,也可能造成支撑生成失败。
这些挑战在模型最低点区域尤为明显,若支撑密度不足,可能直接导致打印失败。人工调整虽可提升打印质量和成品率,但依赖工程师经验且耗时较长。
VDA提供的多层嵌套支撑脚本可有效解决上述问题,减少对专业工程师的依赖,加速生产流程,并降低打印错误率。
多层嵌套支撑脚本
实现支撑自动化
针对每天处理大量不同几何特征零件的现状,VDA强大的支撑脚本及灵活可调的脚本参数提供了全新、高效且可靠的解决方案:
1. 多支撑脚本嵌套
VDA支撑脚本支持在单个脚本中嵌套多种支撑类型,用户可针对不同表面特征(如球面、锥面等)或高度区域灵活设置不同临界角参数,精准生成对应支撑,这一功能允许用户一次性完成多类零件的支撑设计,确保支撑在任意角度表面都能可靠生成,大幅简化操作流程。
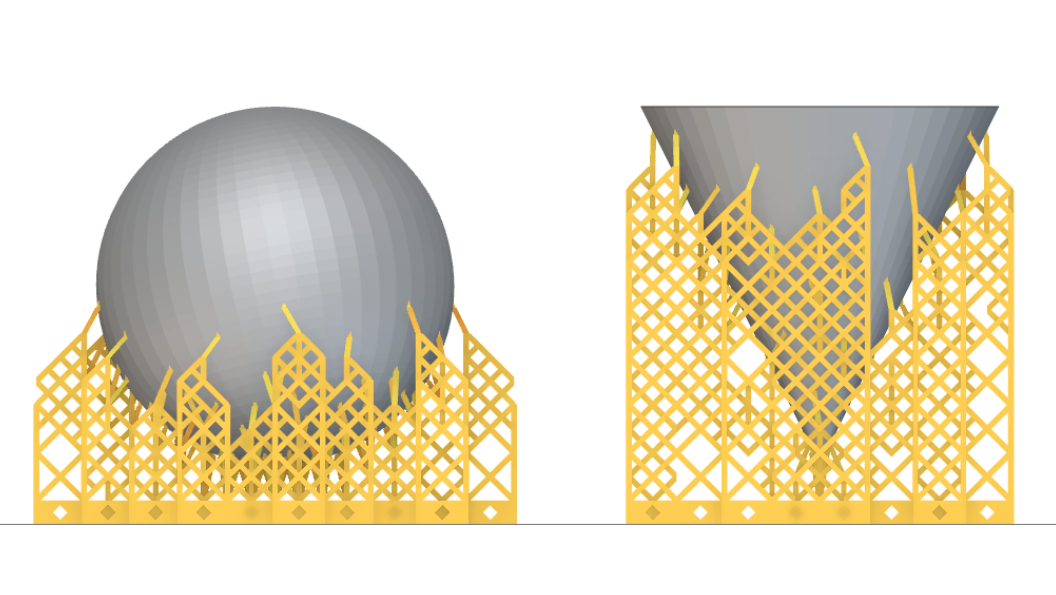
图1 多层嵌套支撑脚本同时在球体与锥体表面生成支撑(正视图)
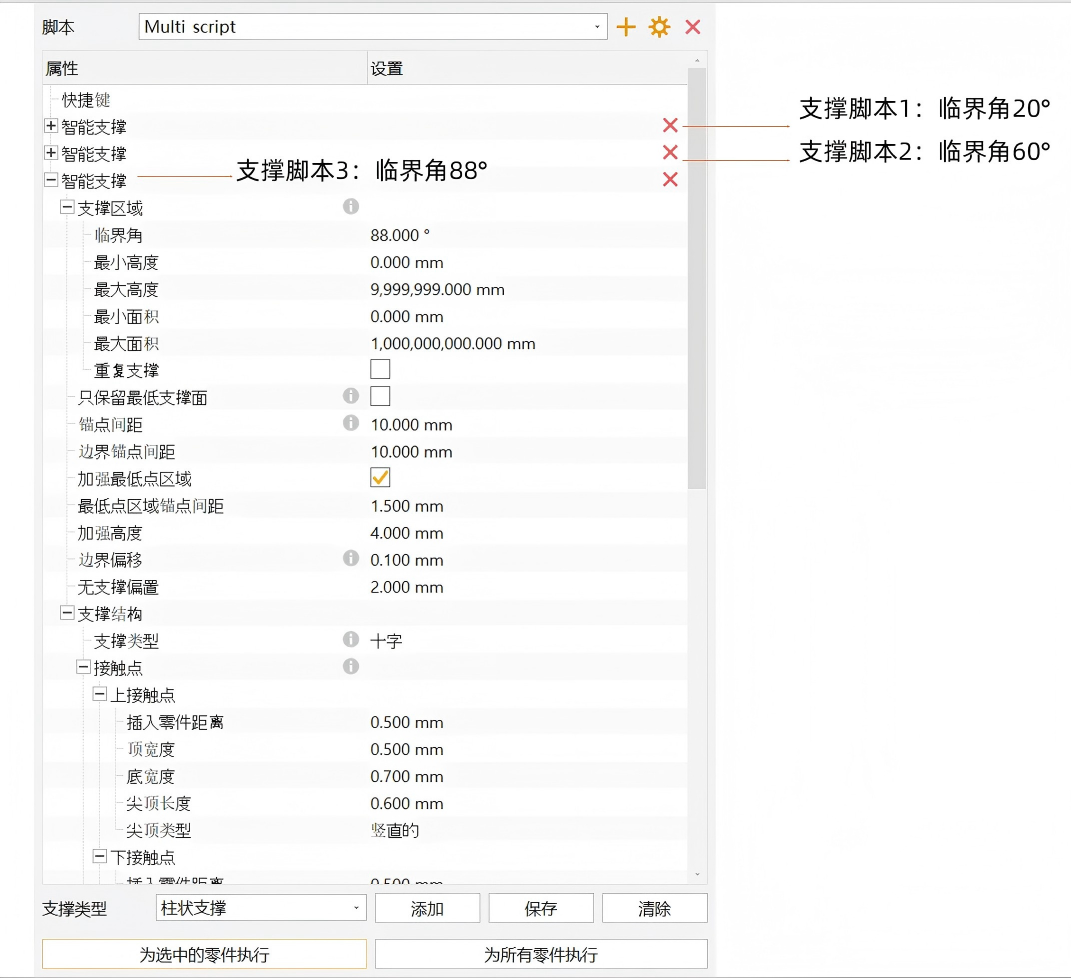
图2 多层嵌套支撑脚本在VDA中的实现
2. 灵活调整特定区域支撑结构
重复支撑功能可以在嵌套脚本中精细管理不同区域的支撑,避免支撑区域重叠时调整参数互相影响的问题。用户可以独立调整每个区域的支撑参数,实现更精准的调控。
用户还可通过增强最低点支撑功能,针对性增大模型最低点处的支撑密度,确保了模型最低点区域顺利打印成型。
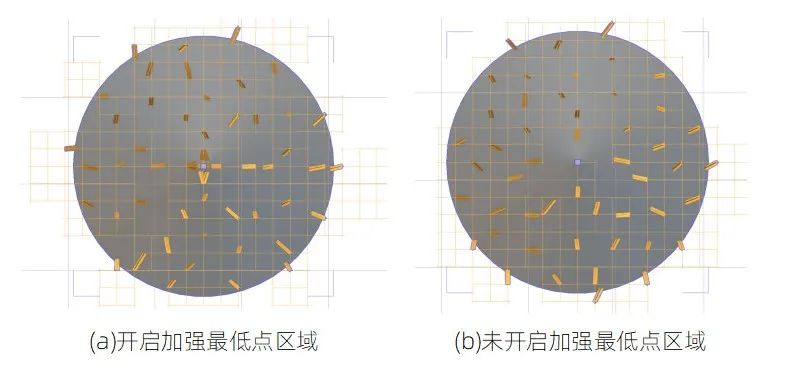
图3 VDA对最低点支撑的优化
3. 分析与优化
VDA内置分析模块可估算支撑体积、材料消耗和加工时间,用户还可通过打印测试验证支撑效果,并根据结果调整参数(如临界角、锚点间距和支撑宽度),以优化支撑结构,减少材料用量并提升打印效率。

图4 不同临界角条件下生成的支撑

表1 不同临界角条件下生成的支撑体积占比
良率提升
添加支撑时间缩短至3-5分钟
实际案例更印证了VDA的显著成效。SLA打印服务中心采用其多层嵌套智能支撑脚本后,经过迭代优化,零件成型良率从82%提升至100%。对于目前主流的600*600mm平台设备来说,整版零件支撑添加时间从手动的40-60分钟缩短至3-5分钟,支撑添加效率大幅提高,不管是对于加工生产还是报价都有重要意义。

图5 零件打印
VoxelDance Additive以其智能高效的解决方案,为3D打印打破传统流程束缚、实现降本增效提供了有力支撑。
以上为白皮书部分内容,如需获取白皮书详细内容,请联系:sales@voxeldance.com
欢迎转发
千人行业专家交流Q群:248112776
延伸阅读:
1.中国学者3D打印晶格结构肌肉骨骼机器人,登上Sci Adv封面,晶格结构生成方法具有开创意义
3.3D打印行业常被使用的仿真:从微观组织、无支撑打印到产品功能
4.日企使用中国3D打印数据处理软件:智能支撑生成助力生产效率翻倍


















 1462
1462

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









