




在《2023年国内3D打印领域被广泛关注的十大重要事件》一文中,3D打印技术参考总结到,国内在废金属回收再制造为优质金属3D打印粉末方面有兴起之象。从未来的角度来说,资源日益减少和减少碳排放,均是大势所趋。由废旧金属再制造为优质金属粉末,很可能会成为今后几年增材制造行业关注的重要方向,其对推动金属3D打印技术的低成本应用具有重要意义。
3D打印技术参考注意到,苏州倍丰智能正在该方向重点研发,于2023年底取得了新成果。

倍丰智能表示,其在TC4 回收料的雾化和3D打印中, 取得优异成果,这是在“金属3D打印全产业链”布局中的更进一步!苏州倍丰通过技术创新,正在构建更加完善高效的金属3D打印生态系统。

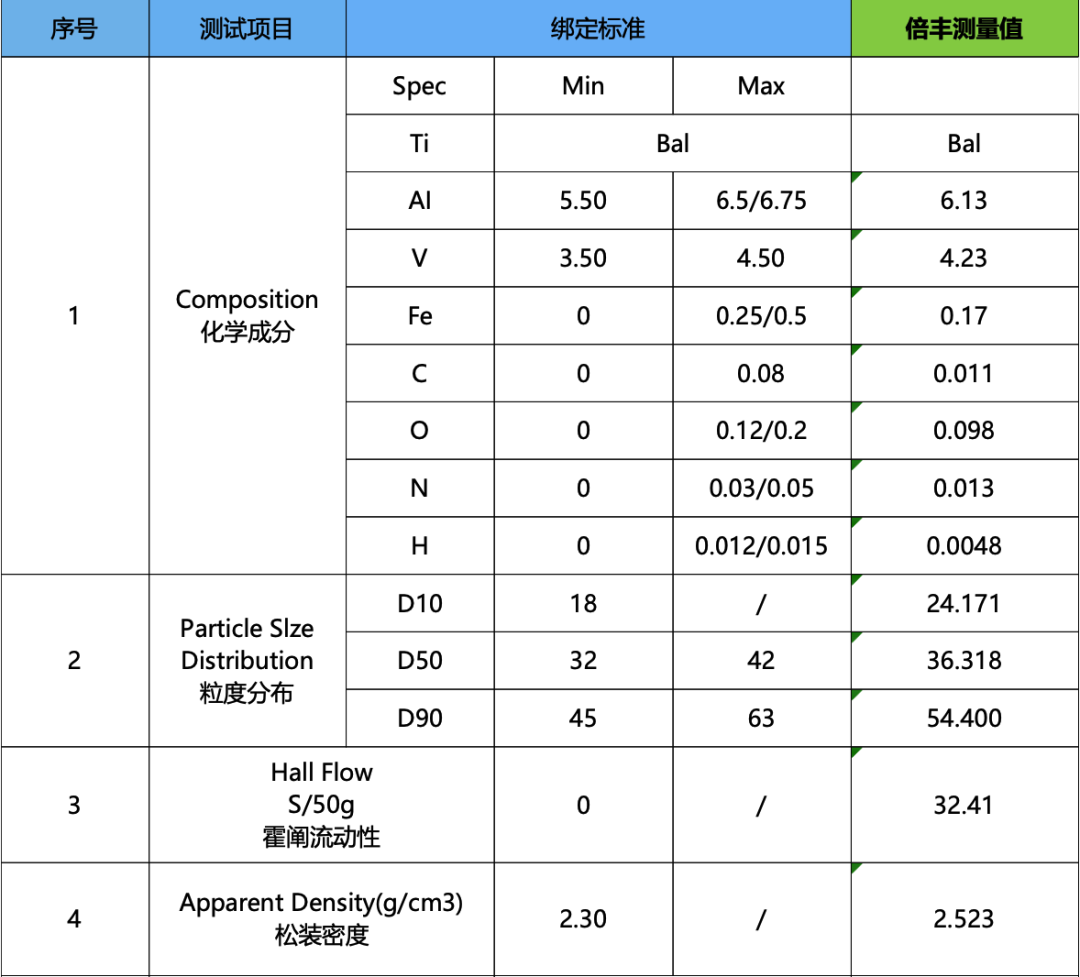
经过第三方检测, 通过苏州倍丰新型雾化工艺制备的回收TC4粉末在粉末特征、粉末流动性、粉末化学成分和3D 打印样棒的拉伸性能等关键指标中均取得了优异的成绩,达到行业先进水平!

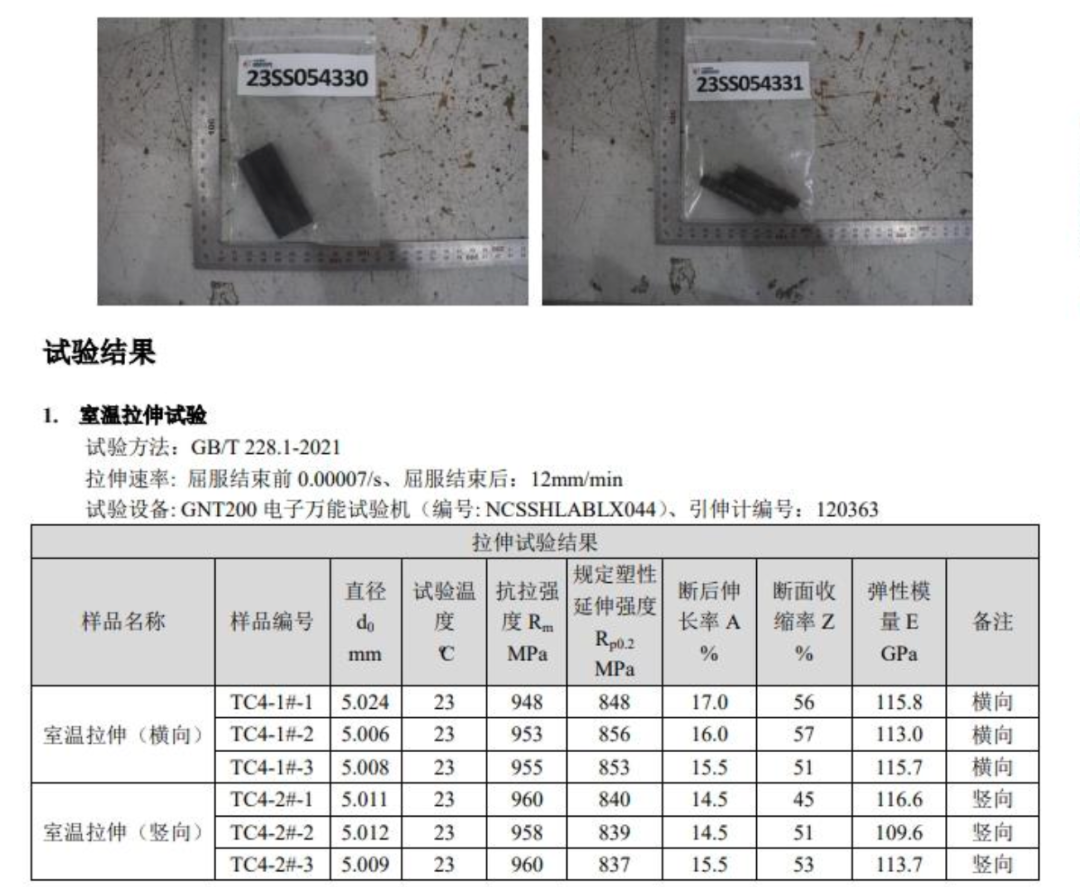
使用TC4回收粉末打印的金属样棒
倍丰智能使用新型雾化制粉工艺,结合倍丰在增材制造原材料制备上多年产品开发和工程应用经验,突破了新料和回收料粉末颗粒球形度、杂质控制以及批次稳定性等技术难题。TC4回收料粉末在性能上与EIGA生产的粉末相媲美,这一点不仅证明了其技术的先进性,也显示了回收粉末在质量和性能方面达到了行业顶尖水平。
《粉末特征、流动性、松散密度监测结果》
《样棒拉伸试验结果》
对于大多数应用钛合金粉末的行业而言,传统钛合金粉末仍是成本高昂的原料。这一创新粉末回收再生技术将提升金属3D打印在成本方面的竞争力。将在航空、汽车、医疗等多个关键领域取得广泛应用,拓宽金属3D打印的行业应用范围。通过提升制造效率并促进新产品与解决方案的开发,苏州倍丰智能的技术正成为这些领域创新进步的重要推动力并树立可持续发展和环境保护新典范。
围绕“金属3D打印全产业链”,倍丰智能以创新技术持续推动金属3D打印行业前进。业务范围涵盖金属3D打印原材料粉末、小型到超大型金属3D打印机、金属粉末前后处理设备和金属构件先进打印服务。业务涉及金属3D打印生态系统各个环节,从材料制备到打印过程,再到先进打印工艺研发,力求在每一步中实现创新和优化。
注:本文内容来自苏州倍丰智能。
欢迎转发
主编微信:2396747576(请注明身份); 硕博千人交流Q群:248112776;网址:www.amreference.com
延伸阅读:
4.铂力特入选国家级首批“千企百城”商标品牌价值提升行动名单



















 1932
1932

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









