




2023年,苏州倍丰智能在金属3D打印技术领域实现诸多突破。对于该公司而言,2023不仅是技术革新的一年,也是引领行业走向新高度的一年。从克服γ'-高温镍基合金3D打印的开裂难题到推出超大型打印设备SP1200和SP801,再到开发新型雾化制粉工艺,苏州倍丰智能的每项成就都在推动着整个金属3D打印行业的发展。这些技术突破充分展现了苏州倍丰对“金属3D打印全产业链”的深度投入和全面布局。通过关键技术的持续创新,推动整个产业链的发展和优化,致力于构建更加完善和高效的金属3D打印生态系统。
01
显示工艺研发实力
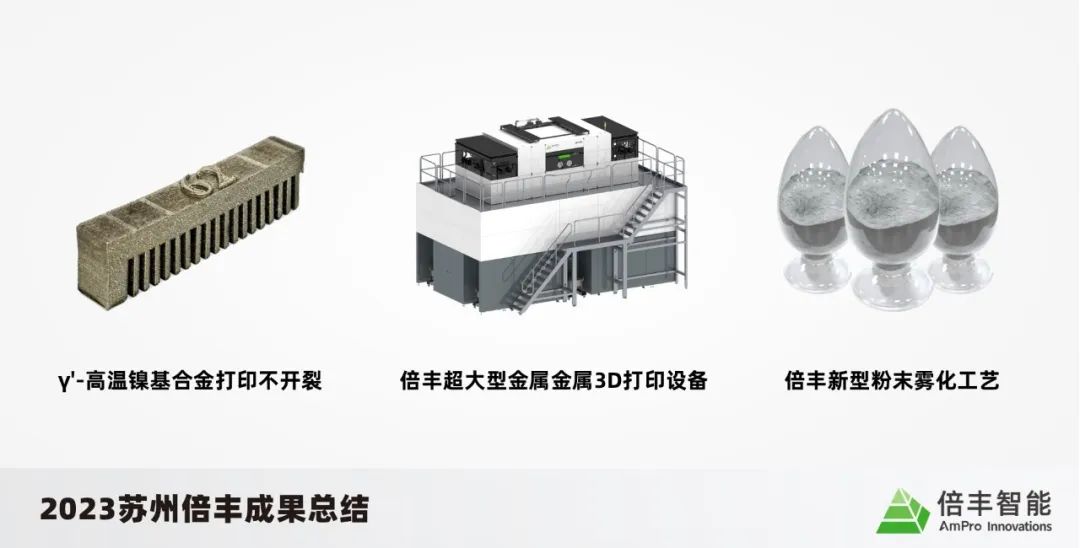
突破γ'-高温镍基合金3D打印不开裂
γ'-高温镍基合金因其优异的高温性能和耐腐蚀性,在航空、汽车等行业具有广泛应用。但该材料在3D打印过程中极易开裂,限制了其应用范围。苏州倍丰智能的研发团队通过优化3D打印参数,成功控制了γ'相的析出速度并减少残余应力,显著降低材料开裂的风险,这一突破解决了长期存在行业难题,更多细节内容请关注倍丰后续公布。

02
面向大尺寸制造
发布超大金属3D打印机
2023年,倍丰智能紧跟行业发展需求,发布超大尺寸金属3D打印机——SP1200,该装备的推出标志着苏州倍丰在超大尺寸金属3D打印设备方面的重大进步。其具备1200x600x1500mm的超大打印幅面和12个激光器,成形效率高达350cm³/h。此外,苏州倍丰独特的双构件仓设计减少了因冷却导致的停机等待时间,有效提高打印效率,这对于大规模生产尤为重要。

SP801大型金属3D打印机配备4激光全幅面打印系统,成形效率高达200cm³/h。双构建仓设计大幅减少了打印件冷却和清理所需的停机时间,进一步提高了生产效率。此外,SP801配置超长效过滤器,使其能够满足超长打印时间的制造需求。
03
全链条布局
新型雾化制粉工艺量产
在金属3D打印中,粉末对最终打印的零件质量至关重要。2023年,苏州倍丰智能带来了自主研发的新型雾化制粉工艺,有效提升金属粉末的质量和一致性。这种工艺在生产出具有更好流动性、更均匀粒度分布金属粉末的同时,细粉收到率高达65%。
END
苏州倍丰智能科技有限公司有吴鑫华教授创立。吴鑫华教授系澳大利亚技术及工程院院士,三十年来致力于金属材料科学和增材制造的世界级科学家,在国内外培养了数位行业精英,并把先进的金属材料工艺和多年积累的增材制造经验带回国内。公司拥有完整的金属3D打印全产业链的解决方案,包括提供成熟及新型的金属原材料,制造从小型到超大型的金属打印装备及粉末前后处理的辅机系列,以及面向航空航天、地面燃机、核电能源、汽车等重点行业的打印研发业务。
公司拥有全球顶尖的金属3D打印技术和材料科学专家技术团队,长期致力于高温镍基合金、钛合金和铝合金材料在航空发动机、航空构件、通讯系统构件、医疗构件金属3D打印上的应用研究,拥有围绕金属3D打印工艺特殊要求的原材料成分开发、轻量化设计和复杂集成制造能力,在金属3D打印工艺参数数据库建立、产品质量控制能力和方案、构件无损检测方案,直至成品适航认证、装机使用的全过程方案和技术方面具有核心竞争力。
欢迎转发
主编微信:2396747576(请注明身份); 硕博千人交流Q群:248112776;网址:www.amreference.com
延伸阅读:
1.新型3D打印雾化制粉工艺量产成功!苏州倍丰继续完善全产业链
2.倍丰公开镍基高温合金3D打印不开裂结果、发布超大型金属3D打印机
3.显著进展:粗粉+大层厚,倍丰实现铝合金高强度、高效率和低成本3D打印
4.ChatGPT关于2024年3D打印行业的预测:整合、扩张和智能工厂



















 234
234

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









