








 超级会员免费看
超级会员免费看

一.什么是D/A转换器?
1.1 D/A转换器
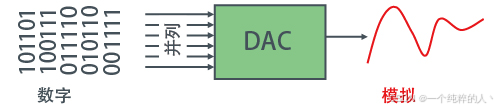
D/A转换器(Digital-to-Analog Converter, DAC)是指将数字(Digital)量转换为模拟(Analog)量的元器件。
- 数字量
相同间隔不连续的量
时间上离散、量方面离散
- 模拟量(自然界的现象)
大小连续的量
时间上连续、量方面离散
二.D/A转换方式的种类
D/A转换器有各种实现方法。
2.1. 使用电阻的产品
电阻元件是在IC上易处理的模拟设备。
比精度也比较好,无需修整就可以实现高达约10bit的精度。
由于选择合适的电阻值,从低速到高速,可涵盖的范围很广。
2.2 使用电容器的产品
在一般IC中由于电容器比电阻的相对精度高,在中高精度的D/A转换器中使用的比较多。
为了获取更高的精度,必须要大电容,充放电时长时间加速比较困难。
另外,在低频时为了补充泄漏电流,需要不断更新,所以工作变得复杂。
2.3 使用电流的产品
这是面向高速(数MHz~)用途的变换方式。根据数字输入,通过开关电流源来切换输出电流。
输出电流是用电阻、运算放大器来进行电流-电压的变换。

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 5万+
5万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











