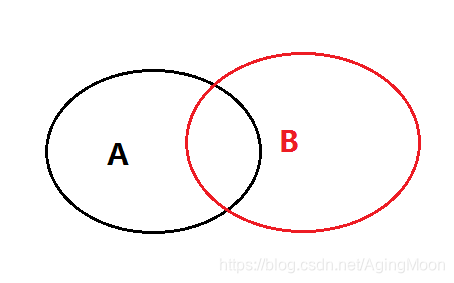
目录 1.贝叶斯公式 2.卡尔曼滤波 3.CNN算法 1.贝叶斯公式 首先直接上图上公式 公式的理解:这个公式想干的事情很简单,就是A和B两个事情有关系,我们想知道,假如B这件事发生了,A发生的概率。 从图中和公式中,可以很直观的理解,想要知道当B发生时A发生的概率,那么肯定是A与B的交集比上B,反过来一样理解,因此就有了所谓的贝叶斯公式。 好,我们更加详细理解下公式里面的概念(记不住没关系,理解才是关键): P(A|B)



 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 9306
9306





