




 Actor-Critic方法是一种结合策略梯度和值函数估计的强化学习算法。QAC是最简单的形式,通过策略更新和Sarsa+值函数近似进行。A2C通过引入基线来降低方差,利用优势函数进行优化。Off-policyActor-Critic通过重要性采样允许使用非目标策略的数据。最后,DPG介绍了确定性策略梯度,适用于连续动作空间。这些算法展示了强化学习中策略优化的不同策略和技巧。
Actor-Critic方法是一种结合策略梯度和值函数估计的强化学习算法。QAC是最简单的形式,通过策略更新和Sarsa+值函数近似进行。A2C通过引入基线来降低方差,利用优势函数进行优化。Off-policyActor-Critic通过重要性采样允许使用非目标策略的数据。最后,DPG介绍了确定性策略梯度,适用于连续动作空间。这些算法展示了强化学习中策略优化的不同策略和技巧。
Actor-Critic方法
Actor-Critic方法是一个非常重要的policy gradient methods。这一类方法强调的一种整合策略梯度和value-based方法的结构。
什么是“
actor”和“
critic”?
- “actor”表示policy update。它被称为actor是因为policies will be applied to take actions。
- “critic”表示policy evaluation或者value estimation。它被称为critic是因为it criticizes the policy by evaluating it。
1. The simplest actor-critic(QAC)
重新回顾policy gradient的思想:
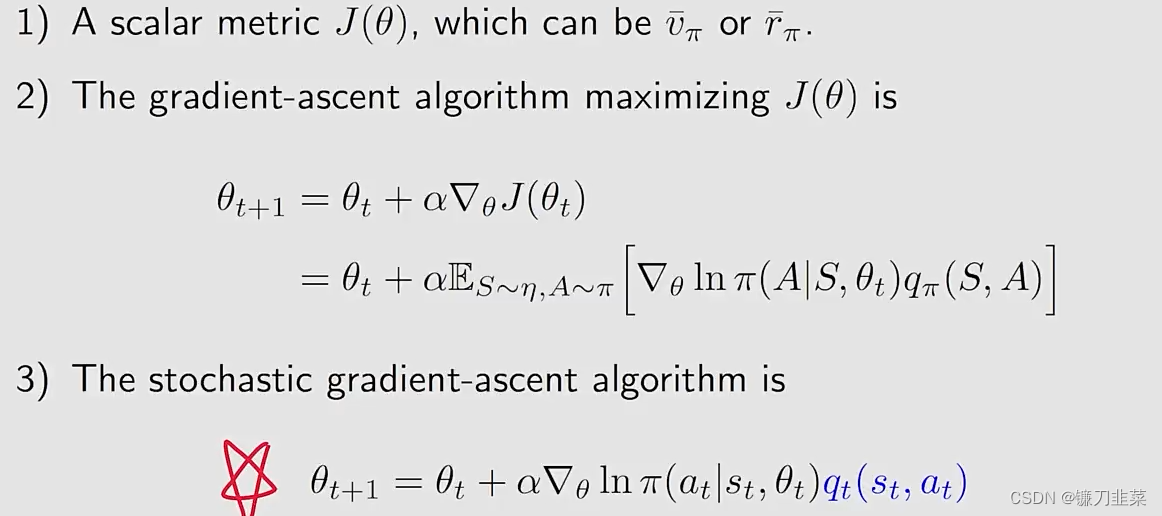
我们可以从这个算法中看到“actor”和“critic”:
- 这个算法对应actor!
- 这个算法估计 q t ( s t , a t ) q_t(s_t,a_t) qt(st,at)对应ctitirc! q t q_t qt是 q π q_\pi qπ的近似
如何得到 q t ( s t , a t ) q_t(s_t, a_t) qt(st,at)?到目前为止,我们已经学习过两种方法来估计action values:
现在给出第一个Actor-Critic算法:QAC
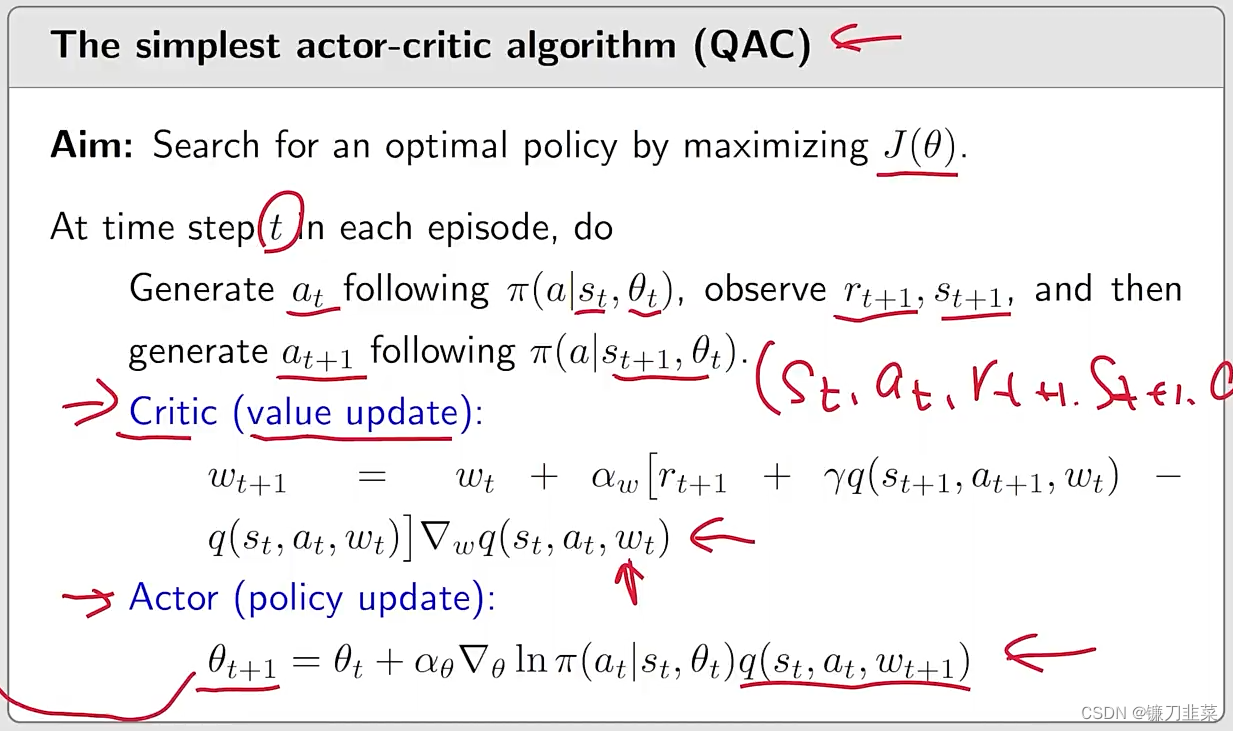
对上面算法做一些补充说明:
- critic对应“Sarsa+value function approximation”
- actor对应policy update algorithm.
- 这个算法是on-policy,为什么呢?
- 因为这个policy是stochastic,no need to use techniques like ϵ \epsilon ϵ-greedy
- 这个特殊的actor-critic algorithm有时候也被称为Q Actor-Critic(QAC)。
- 尽管简单,但是该算法揭示了actor-critic方法的核心思想。它可以被扩展到其他算法当中。
2. Advantage actor-critic(A2C)
A2C是QAC的一个推广。基本思想是它在reduce variance过程中引入了一个baseline。
Baseline invariance
首先介绍一个性质,the policy gradient is invariant to an additional baseline:

这里,the additional baseline b ( S ) b(S) b(S) 是 S S S的一个scale function。
两个问题:
- 为什么引入一个新的b(S)它不会发生变化?
- 为什么要关注这个 b ( S ) b(S) b(S),它究竟有什么用?
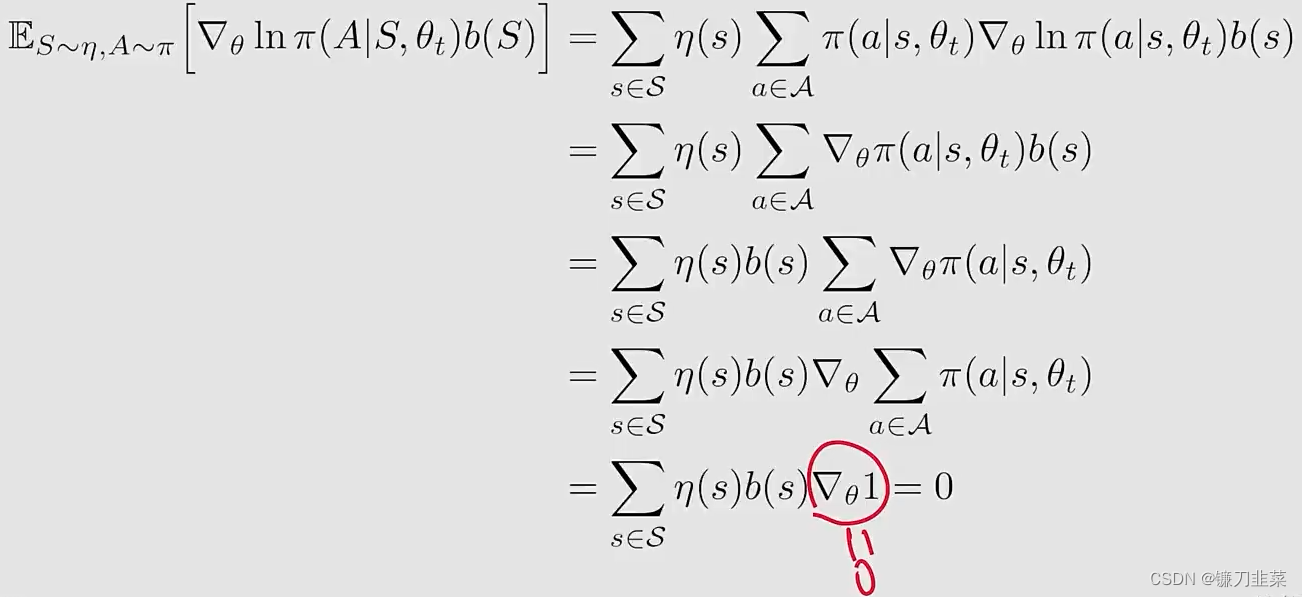
第一个问题,为什么引入一个新的 b ( S ) b(S) b(S)公式仍然成立?这是因为

细节如下:
第二个问题,为什么这个baseline是有用的?首先把刚才的这个梯度 ∇ θ J ( θ ) = E [ X ] \nabla_\theta J(\theta)=\mathbb{E}[X] ∇θJ(θ)=E[X],把这个 E [ X ] \mathbb{E}[X] E[X]写成一个新的变量 X X X:

我们有:
- E [ X ] \mathbb{E}[X] E[X]对于 b ( S ) b(S) b(S)是invariant
- 方差 v a r ( X ) var(X) var(X)对于 b ( S ) b(S) b(S)不是invariant
- 为什么?因为 t r [ v a r ( X ) ] = E [ X T − X ] − x ˉ T x ˉ tr[var(X)]=\mathbb{E}[X^T-X]-\bar{x}^T\bar{x} tr[var(X)]=E[XT−X]−xˉTxˉ,并且

当b是非常巨大的时候,对于E的影响也是不一样的。
- 为什么?因为 t r [ v a r ( X ) ] = E [ X T − X ] − x ˉ T x ˉ tr[var(X)]=\mathbb{E}[X^T-X]-\bar{x}^T\bar{x} tr[var(X)]=E[XT−X]−xˉTxˉ,并且
我们的目标:寻找一个最优的baseline b b b最小化 v a r ( X ) var(X) var(X)
- Benefit:当我们使用一个随机采样去近似 E [ X ] \mathbb{E}[X] E[X]的时候,the estimation variance应当是较小的。
在REINFORCE和QAC算法中:
- 没有baseline
- 或者,我们可以说 b = 0 b=0 b=0,也就是not guaranteed to be a good baseline。
能够最小化方差 v a r ( X ) var(X) var(X)的最优baseline应当是,对于任意 s ∈ S s\in \mathcal{S} s∈S,有

- 尽管这个baseline是最优的,但是它太复杂了
- 所以,我们可以移除权重 ∣ ∣ ∇ θ ln π ( A ∣ s , θ t ) ∣ ∣ 2 ||\nabla_\theta \ln \pi (A|s, \theta_t)||^2 ∣∣∇θlnπ(A∣s,θt)∣∣2并且选择次优的baseline: b ( s ) = E A ∼ π [ q ( s , A ) ] = v π ( s ) b(s)=\mathbb{E}_{A\sim \pi}[q(s,A)]=v_\pi(s) b(s)=EA∼π[q(s,A)]=vπ(s)这是s的state value!
The algorithm of advantage actor-critic
当 b ( s ) = v π ( s ) b(s)=v_\pi(s) b(s)=vπ(s),
- the gradient-ascent algorithm是:

其中 δ π ( S , A ) ≐ q π ( S , A ) − v π ( S ) \delta_\pi(S,A)\doteq q_\pi(S,A)-v_\pi(S) δπ(S,A)≐qπ(S,A)−vπ(S)被称为advantage function(为什么称为advantage?其实它描述的是 q π q_\pi qπ和 v π v_\pi vπ之间的差,而 v π v_\pi vπ是 q π q_\pi qπ在某一个状态下它的一个平均值,那么如
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 2049
2049

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











