




 文章介绍了模型自由的强化学习算法,特别是基于蒙特卡洛方法的策略评估和改进。MC-Basic算法是模型迭代的一种变体,用于估计动作值而不是状态值。ε-贪婪策略用于在探索和利用之间取得平衡,允许在不需探索起点的情况下进行有效的学习。通过多个例子,阐述了ε-贪婪策略如何影响学习过程和最优策略的发现,强调了在不同ε值下策略的优化性和探索性。
文章介绍了模型自由的强化学习算法,特别是基于蒙特卡洛方法的策略评估和改进。MC-Basic算法是模型迭代的一种变体,用于估计动作值而不是状态值。ε-贪婪策略用于在探索和利用之间取得平衡,允许在不需探索起点的情况下进行有效的学习。通过多个例子,阐述了ε-贪婪策略如何影响学习过程和最优策略的发现,强调了在不同ε值下策略的优化性和探索性。
强化学习数学方法:蒙特卡洛方法
将value iteration和policy iteration方法称为model-based reinforcement learning方法,这里的Monte Carlo方法称为model-free的方法。
举个例子
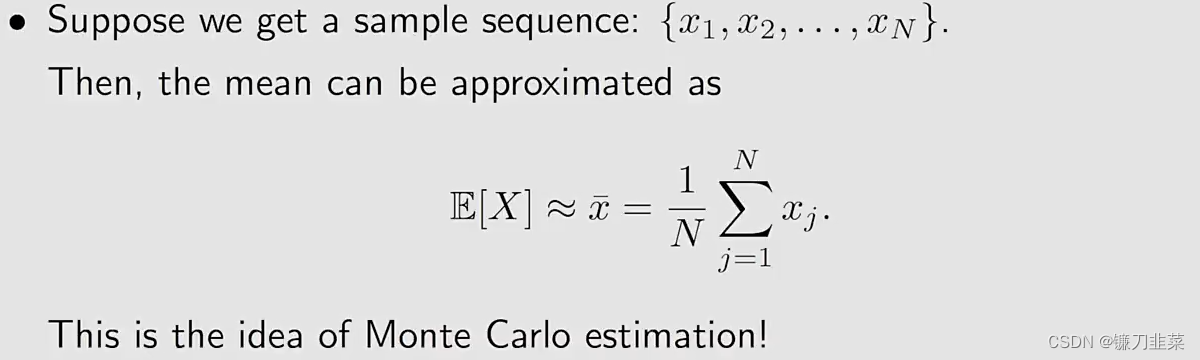
如何在没有模型的情况下估计某些事情?最简单的想法就是Monte Carlo estimation。
举个例子1:投掷硬币

目标是计算 E [ X ] \mathbb{E}[X] E[X]。有两种方法:
Method 1: Model-based
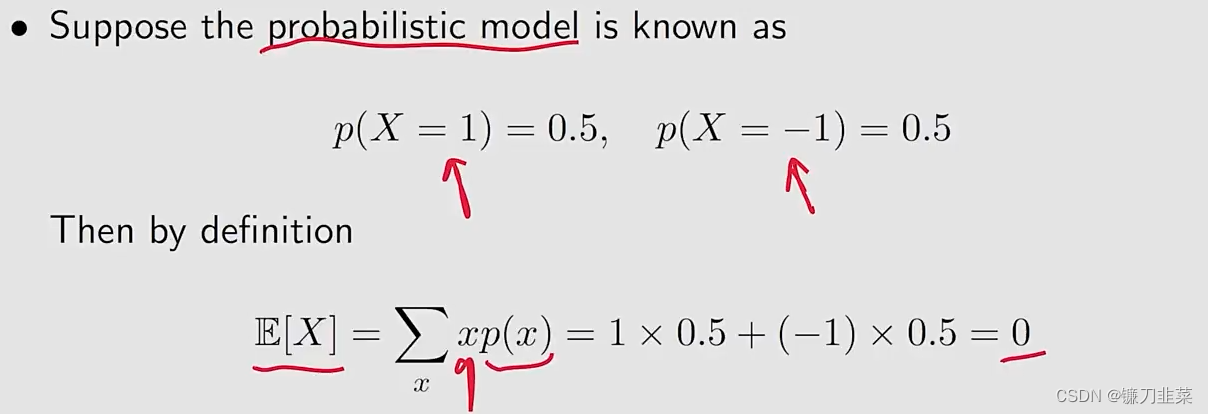
这个方法虽然简单,但是问题是它不太可能知道precise distribution。
Method 2: Model-free
该方法的思想是将硬币投掷很多次,然后计算结果的平均数。
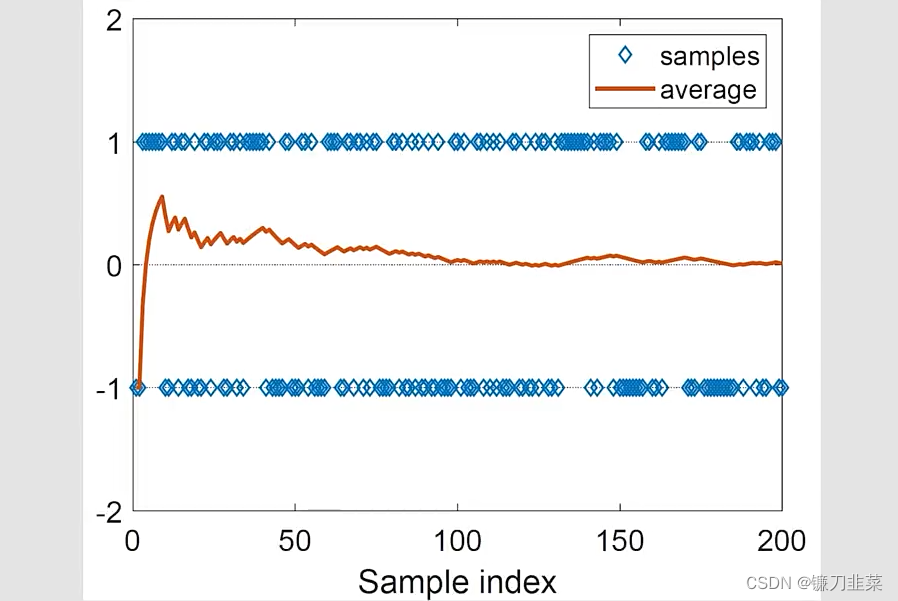
问题:Monte Carlo估计是精确的吗?
- 当N是非常小的时候,估计是不精确的
- 随着N的增大,估计变得越来越精确
大数定理(Law of Large Numbers):
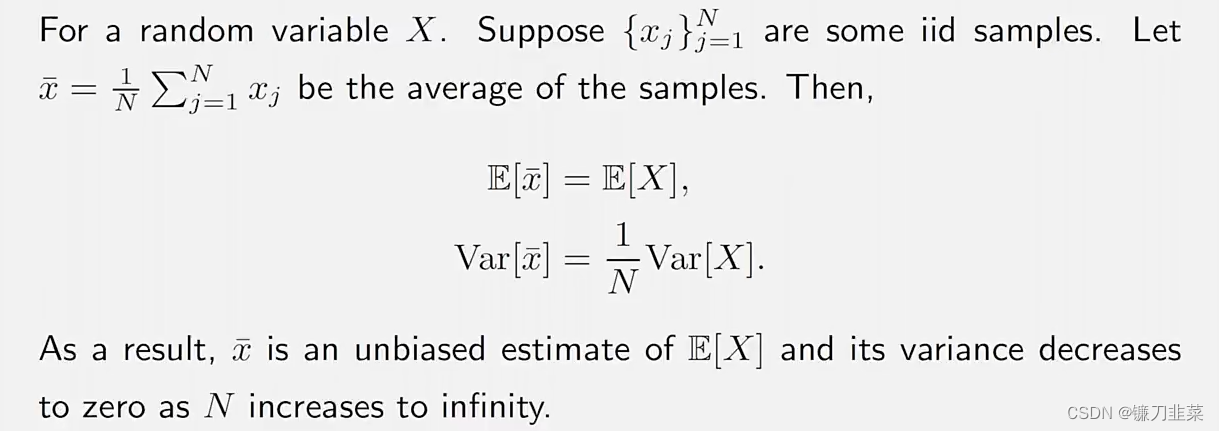
注意:样本必须是独立同分布的(iid, independent and identically distributed)
小结一下:
- Monte Carlo estimation refers to a broad class of techniques that rely on repeated random sampling to solve appriximation problems.
- Why we care about Monte Carlo estimation? Because it does not require the model!
- Why we care about mean estimation? Because state value and action value are defined as expectations of random variables!
The simplest MC-based RL algorithm
Algorithm: MC Basic
理解该算法的关键是理解how to convert the policy iteration algorithm to be model-free
Convert policy iteration to be model-free
首先,策略迭代算法在每次迭代中分为两步:

其中policy improvement step的elementwise form如下:

这里的关键是 q π k ( s , a ) q_{\pi_k}(s, a) qπk(s,a)!计算 q π k ( s , a ) q_{\pi_k}(s, a) qπk(s,a)有两种算法:
Expression 1 requires the model:

Expression 2 does not require the model:

上面的式子针对实现model-free的RL的启发是:可以使用式子2,根据数据(samples或者experiences)去计算 q π k ( s , a ) q_{\pi_k}(s, a) qπk(s,a)。那具体是怎么做的呢?
The procedure of Monte Carlo estimation of action values:
- 首先,从一个组合 ( s , a ) (s,a) (s,a)出发,按照一个策略 π k \pi_k πk,生成一个episode;
- 计算这个episode,return是 g ( s , a ) g(s, a) g(s,a)
- g ( s , a ) g(s,a) g(s,a)是在下式中 G t G_t Gt的一个采样: q π k ( s , a ) = E [ G t ∣ S t = s , A t = a ] q_{\pi_k}(s,a)=\mathbb{E}[G_t|S_t=s, A_t=a] qπk(s,a)=E[Gt∣St=s,At=a]
- 假设我们有一组episodes和hence { g ( j ) ( s , a ) } \{g^{(j)}(s,a)\} { g(j)(s,a)},那么 q π k ( s , a ) = E [ G t ∣ S t = s , A t = a ] ≈ 1 N ∑ i = 1 N g ( i ) ( s , a ) q_{\pi_k}(s,a)=\mathbb{E}[G_t|S_t=s, A_t=a]\approx \frac{1}{N}\sum_{i=1}^Ng^{(i)}(s, a) qπk(s,a)=E[Gt∣St=s,At=a]≈N1
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 1025
1025

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











