



转速环里面包含有电流环在内,当外面给定转速时,系统通过控制iq来控制电磁转矩,从而电机开始转动。电机在转动的过程,传感器检测到机械角度会改变,也就是说电角度也会改变,由电角度在单位时间的变化,就可以求出电角速度,从而就可以得到反馈回来转速参与转速决策,最终可以控制转速稳定。
1、电磁转矩方程与运动方程的传递函数
网上的结构框图如下:
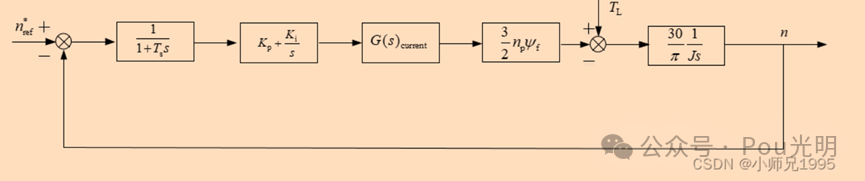
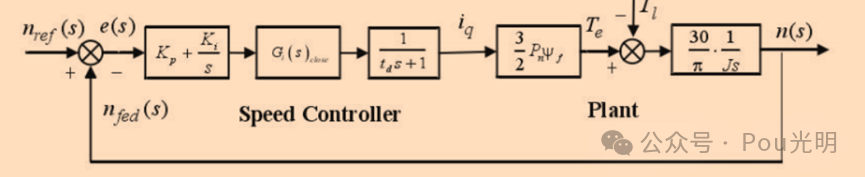
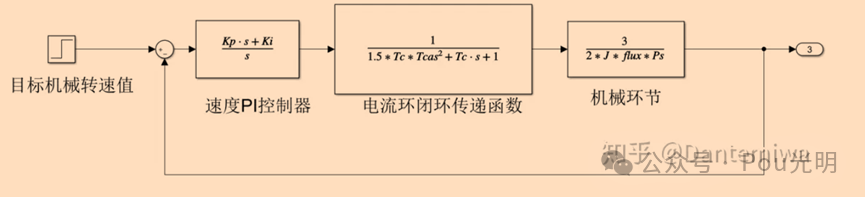
通过之前的学习,上面三种框图组成部分可分为速度环PI控制器、系统延迟、电流环、PMSM电磁转矩方程、PMSM运动方程。
①电磁转矩方程
这里面有提到,对于表贴式,Ld=Lq=Ls;若为了实现为了实现最大扭矩控制,就会采用 𝑖𝑑=0 控制(后续再整理),则:
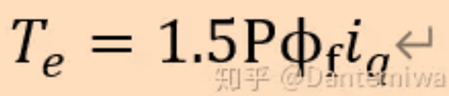
在框图中,iq来自之前的电流环。
① 运动方程
GPT:
1.1基本方程
首先,从电磁转矩 TeT_eTe和转子速度 ωr 的关系出发。
1>电磁转矩
PMSM的电磁转矩Te表达式为:
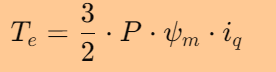
其中:
P是电机的极对数
ψm是永磁体的磁链
iq是q轴电流分量
2>机械运动方程
机械运动方程描述了电磁转矩 Te与转子速度ωr之间的关系:
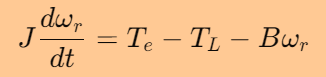
其中:
J是转动惯量
TL是负载转矩
B是粘性阻尼系数
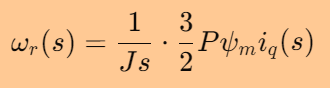
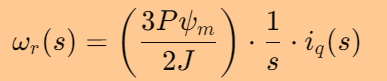
在频域中,上述方程可以表示为:

将电磁转矩 Te的表达式代入上式,可以得到:

3>简化粘性阻尼项
通常假设阻尼项 B较小或可以忽略,这样机械运动方程进一步简化为:
2传递函数推导
假设在控制设计中,负载转矩 TLT_LTL 是已知且恒定值,因此可以考虑在推导过程中忽略它的动态变化。此时,传递函数仅由电流到转速的关系决定。
将电磁转矩与电流的关系代入,得到:
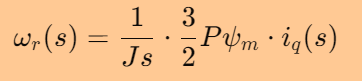
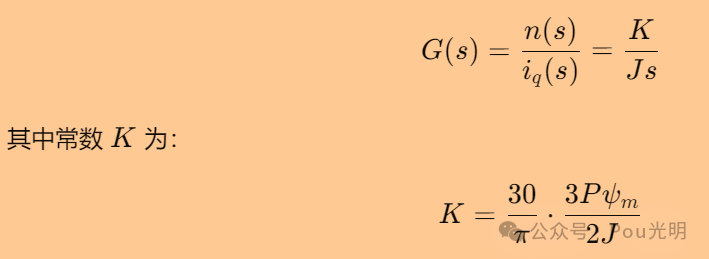
将上式中的常数项提取出来
3确定传递函数中的常数项
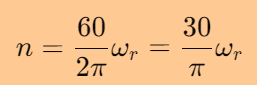
对于具体的传递函数,通常通过引入相应的常数因子将转速的单位从机械角速度(弧度/秒)转换为转速(RPM)。
机械角速度 ωr 和电机转速 n (单位: RPM) 之间的关系为:
因此,上述传递函数可以表示为:
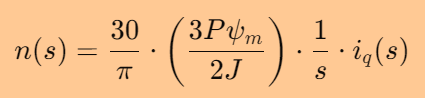
即:
4结论
最终,PMSM在FOC控制中的传递函数,表示为输入电流 iq(s)和输出转速n(s)的关系:
欢迎关注:

















 610
610

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









