




 本文介绍如何利用Matlab实现基于DH参数的机器人正运动学求解过程,包括DH表的建立及其改进方法,通过循环计算各连杆的齐次变换矩阵,并最终得到末端执行器相对于基座的位置。
本文介绍如何利用Matlab实现基于DH参数的机器人正运动学求解过程,包括DH表的建立及其改进方法,通过循环计算各连杆的齐次变换矩阵,并最终得到末端执行器相对于基座的位置。
目录
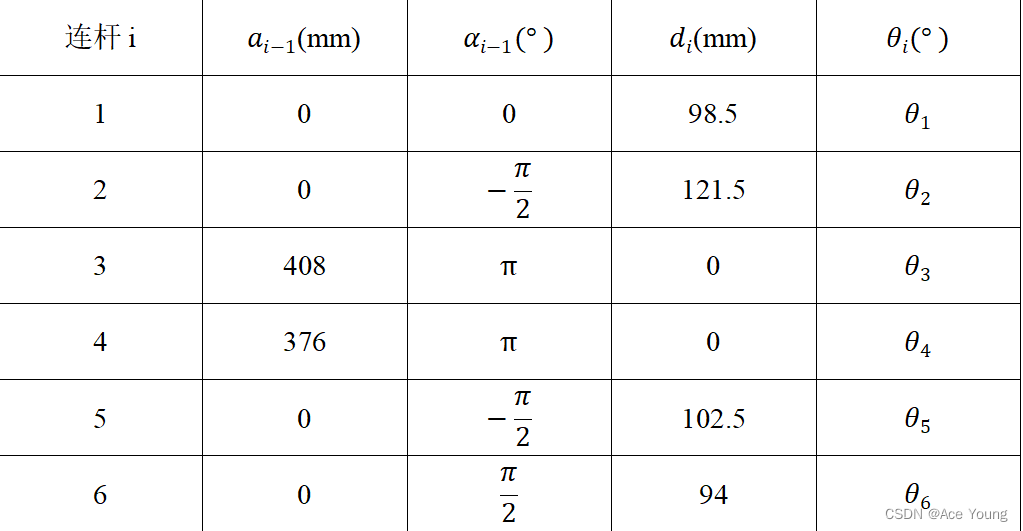
1.DH表建立
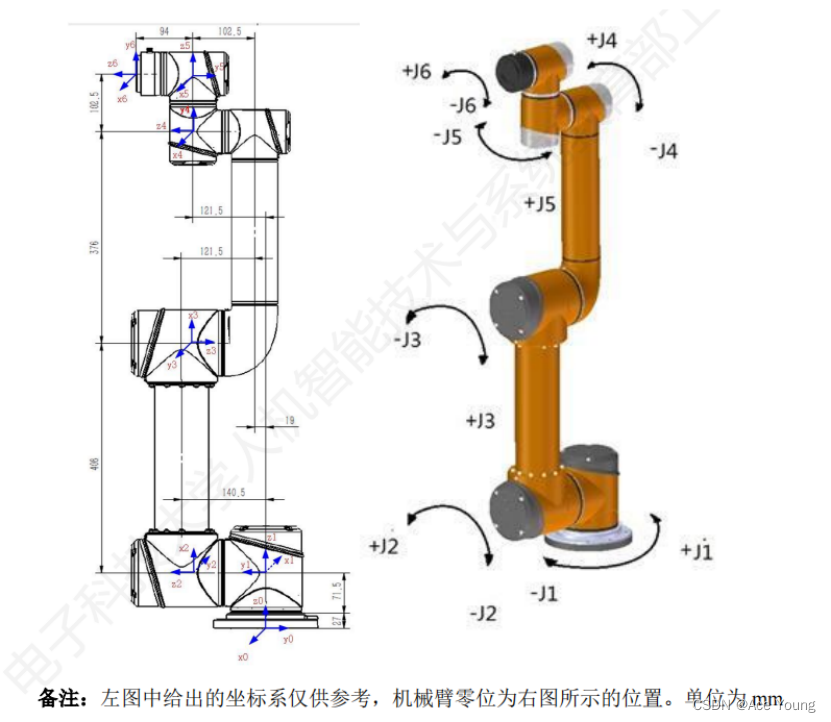
注:使用改进DH表建立的
根据公式求出相邻连杆的变换矩阵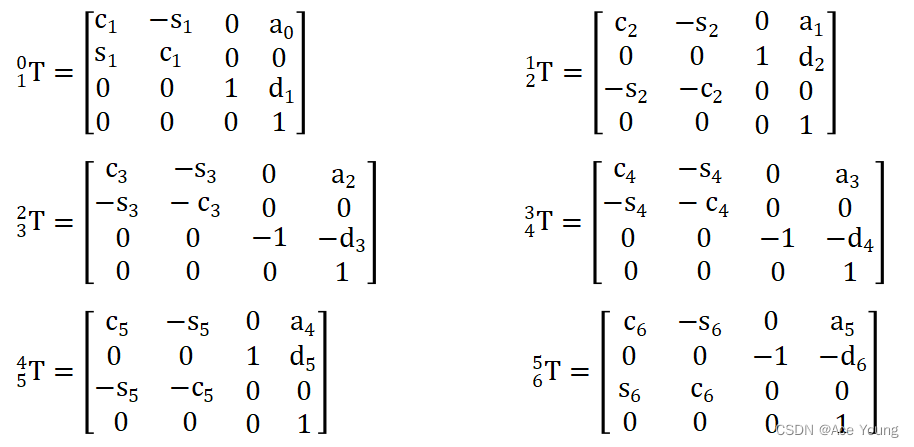
2.Matlab实现正运动学求解
function [H, H_i] = aubo_fkin(DHtable,q)
% H 为输出,末端到基座的 4X4 齐次变换矩阵;
% H_i 为输出,相邻连杆的 4X4 齐次变换矩阵,由于有 n 个连杆,因此 H_i 应该为包含 n 个元素的 cell;
% DHtable 为输入,是一个 nX4 的矩阵,满足 DH 改进约定的 DH 表
% q 为输入,是一个 1xN 的向量,表示关节坐标
%%%!!!!注:机械臂零位的角度应先加到q中,而DH表不含有零位角度!!!!!!!%%
%%相邻连杆的 4X4 齐次变换矩阵%%
first=1;
last=size(DHtable,1);%%计算出有多少个连杆
for i=first:last
theta=q(i);
d= 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 887
887









 到【灌水乐园】发言
到【灌水乐园】发言









