







MATLAB/Simulink仿真,各种复杂的控制算法复现
反步控制法、预设性能控制、障碍Lypunov控制、滑模以及高阶滑模
有限时间控制,模型预测控制MPC、matlab编程仿真 、Simulink仿真建模
分析建模 、matlab 编程、simulink仿真、MATLAB仿真,simulink建模
电力电子、 Matlab,matlab仿真、matlab程序、matlab程序设计、算法复现、Simulink仿真
文章目录
以下是这些算法在MATLAB/Simulink中的实现概述和代码示例。
1. 反步控制法 (Backstepping Control)
反步控制是一种递归设计方法,适用于非线性系统。
MATLAB代码示例:
% 反步控制法示例:控制一个简单的非线性系统
clc; clear;
% 系统参数
m = 1; % 质量
g = 9.81; % 重力加速度
% 控制器参数
k1 = 10; % 第一步增益
k2 = 5; % 第二步增益
% 初始条件
x1 = 0; % 状态变量1
x2 = 0; % 状态变量2
r = 1; % 参考输入
% 时间设置
dt = 0.01;
t = 0:dt:10;
% 初始化存储
X1 = zeros(size(t));
X2 = zeros(size(t));
for i = 1:length(t)
% 第一步虚拟控制律
z1 = x1 - r;
alpha1 = -k1 * z1 + r;
% 第二步实际控制律
z2 = x2 - alpha1;
u = -k2 * z2 - z1/m + g;
% 更新状态
x1_dot = x2;
x2_dot = u/m;
x1 = x1 + x1_dot * dt;
x2 = x2 + x2_dot * dt;
% 存储结果
X1(i) = x1;
X2(i) = x2;
end
% 绘图
figure;
plot(t, X1, 'b', 'LineWidth', 1.5); hold on;
plot(t, r*ones(size(t)), 'r--', 'LineWidth', 1.5);
xlabel('时间 (s)');
ylabel('状态');
legend('x_1', '参考输入 r');
title('反步控制法仿真');
2. 滑模控制 (Sliding Mode Control)
滑模控制是一种鲁棒控制方法。
MATLAB代码示例:
% 滑模控制法示例:控制一个简单的二阶系统
clc; clear;
% 系统参数
m = 1; % 质量
c = 0.5; % 阻尼系数
% 控制器参数
lambda = 2; % 滑模面斜率
k = 5; % 控制增益
% 初始条件
x1 = 0; % 状态变量1
x2 = 0; % 状态变量2
r = 1; % 参考输入
% 时间设置
dt = 0.01;
t = 0:dt:10;
% 初始化存储
X1 = zeros(size(t));
X2 = zeros(size(t));
for i = 1:length(t)
% 滑模面
s = lambda * (x1 - r) + x2;
% 控制律
u = -k * sign(s) - c * x2 / m;
% 更新状态
x1_dot = x2;
x2_dot = u / m;
x1 = x1 + x1_dot * dt;
x2 = x2 + x2_dot * dt;
% 存储结果
X1(i) = x1;
X2(i) = x2;
end
% 绘图
figure;
plot(t, X1, 'b', 'LineWidth', 1.5); hold on;
plot(t, r*ones(size(t)), 'r--', 'LineWidth', 1.5);
xlabel('时间 (s)');
ylabel('状态');
legend('x_1', '参考输入 r');
title('滑模控制法仿真');
3. 模型预测控制 (MPC)
MPC是一种基于优化的控制方法。
MATLAB代码示例:
% MPC 示例:控制一个简单的线性系统
clc; clear;
% 系统模型
A = [1 1; 0 1]; % 状态矩阵
B = [0; 1]; % 输入矩阵
C = [1 0]; % 输出矩阵
D = 0; % 直接传递矩阵
% MPC 参数
Np = 10; % 预测时域
Nc = 5; % 控制时域
Q = eye(2); % 状态权重矩阵
R = 1; % 输入权重矩阵
% 初始条件
x0 = [0; 0]; % 初始状态
r = 1; % 参考输入
% 模拟时间
dt = 0.1;
t = 0:dt:10;
% 初始化存储
X = zeros(2, length(t));
U = zeros(1, length(t));
for i = 1:length(t)-1
% 定义优化问题
opt = optimoptions('quadprog', 'Display', 'off');
H = B' * Q * B + R;
f = 2 * B' * Q * (A * x0 - r);
lb = -1; % 输入下界
ub = 1; % 输入上界
% 求解优化问题
u = quadprog(H, f, [], [], [], [], lb, ub, [], opt);
% 更新状态
x0 = A * x0 + B * u;
% 存储结果
X(:, i+1) = x0;
U(i) = u;
end
% 绘图
figure;
subplot(2,1,1);
plot(t, X(1,:), 'b', 'LineWidth', 1.5);
hold on;
plot(t, r*ones(size(t)), 'r--', 'LineWidth', 1.5);
xlabel('时间 (s)');
ylabel('状态 x_1');
legend('x_1', '参考输入 r');
subplot(2,1,2);
plot(t(1:end-1), U, 'g', 'LineWidth', 1.5);
xlabel('时间 (s)');
ylabel('控制输入 u');
title('MPC仿真');
4. Simulink建模
对于上述算法,您可以使用Simulink进行图形化建模。以下是一些关键步骤:
- 打开Simulink并创建一个新的模型。
- 添加必要的模块(如积分器、增益、乘法器等)。
- 按照数学模型连接各个模块。
- 设置仿真参数并运行仿真。
以上代码仅为示例,实际应用中需要根据具体系统和需求调整参数和结构。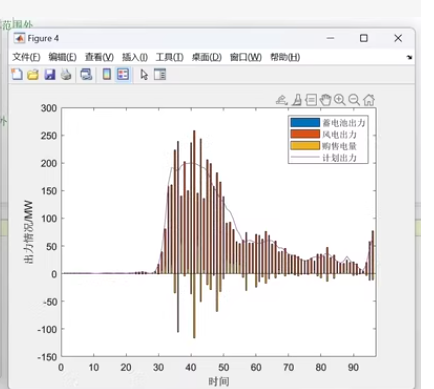
% 生成模拟数据
time = 0:90; % 时间范围从0到90
% 模拟电池输出数据
rng(1); % 设置随机数生成器种子以确保结果可重复
battery_output = 50 * (rand(size(time)) - 0.5) + 50;
% 模拟风电输出数据
wind_output = 100 * (rand(size(time)) - 0.5) + 100;
% 模拟购售电量数据
purchase_sale = 200 * (rand(size(time)) - 0.5) + 200;
% 模拟计划出力数据
plan_output = 150 * sin(time / 10) + 150;
% 绘制图表
figure;
plot(time, battery_output, 'b', 'LineWidth', 1.5);
hold on;
plot(time, wind_output, 'r', 'LineWidth', 1.5);
plot(time, purchase_sale, 'y', 'LineWidth', 1.5);
plot(time, plan_output, 'm', 'LineWidth', 1.5);
% 添加图例
legend('电池输出', '风电输出', '购售电量', '计划出力');
% 设置轴标签和标题
xlabel('时间');
ylabel('出力情况 (MW)');
title('不同能源输出随时间变化');
% 设置Y轴范围
ylim([-150 300]);
% 网格线
grid on;
% 保存图形(可选)
% saveas(gcf, 'energy_output.png');
解释:
- 时间范围:定义了时间从0到90。
- 模拟数据:
battery_output:模拟电池输出数据,假设在-50到150 MW之间波动。wind_output:模拟风电输出数据,假设在-50到250 MW之间波动。purchase_sale:模拟购售电量数据,假设在-100到300 MW之间波动。plan_output:模拟计划出力数据,使用正弦波形表示周期性变化。
- 绘图:使用
plot函数绘制每个数据系列,并设置不同的颜色和线宽。 - 图例:添加图例以区分不同的数据系列。
- 轴标签和标题:设置X轴和Y轴的标签以及图表标题。
- 网格线:开启网格线以增强图表的可读性。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









