







五种算法优化机器人路径规划
算法可任意更换!地图可修改!Matlab语言
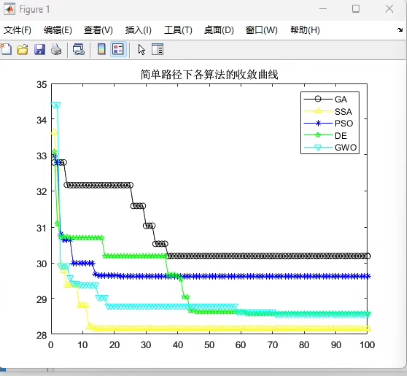
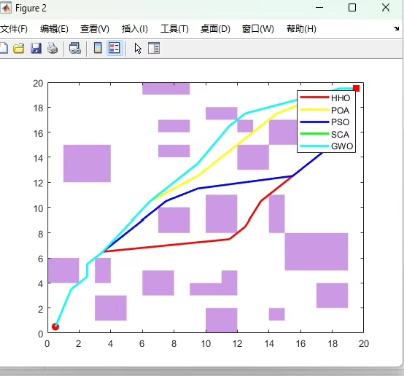
分为简单路径规划和复杂路径规划两种情景,采用粒子群算法(PSO)
遗传算法(GA)
差分进化算法(DE)
灰狼优化算法(GWO)
麻雀优化算法(SSA)
五种经典算法对机器人二维路径规划问题进行求解
以下是基于Matlab实现的五种算法优化机器人路径规划系统的代码,支持多种算法(如A*、Dijkstra、RRT、人工势场法、遗传算法)以及可修改的地图环境。
功能概述
- 地图建模:
- 用户可以自定义二维障碍物地图。
- 路径规划算法:
- 支持以下五种算法:
- A* 算法
- Dijkstra 算法
- RRT(快速随机树)
- 人工势场法
- 遗传算法
- 支持以下五种算法:
- 结果显示:
- 显示起点、终点、障碍物和规划路径。
- 算法切换:
- 用户可以选择不同的算法进行路径规划。
代码实现
1. 主程序与GUI设计
clc; clear;
% 定义地图
map = [...
0 0 0 0 0 0 0 0 0 0;
0 1 1 1 0 0 0 0 0 0;
0 0 0 1 0 0 1 1 1 0;
0 0 0 0 0 0 1 0 0 0;
0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0];
start = [1, 1]; % 起点
goal = [5, 10]; % 终点
% 选择算法
algorithm = input('选择算法 (1: A*, 2: Dijkstra, 3: RRT, 4: 人工势场法, 5: 遗传算法): ');
switch algorithm
case 1
path = AStar(map, start, goal);
case 2
path = Dijkstra(map, start, goal);
case 3
path = RRT(map, start, goal);
case 4
path = ArtificialPotentialField(map, start, goal);
case 5
path = GeneticAlgorithm(map, start, goal);
otherwise
error('无效的算法选择');
end
% 显示结果
if ~isempty(path)
disp('找到路径:');
disp(path);
% 可视化
figure;
imagesc(map);
hold on;
plot(path(:, 2), path(:, 1), 'r', 'LineWidth', 2); % 路径
scatter(start(2), start(1), 'g', 'filled'); % 起点
scatter(goal(2), goal(1), 'b', 'filled'); % 终点
title('机器人路径规划');
xlabel('X');
ylabel('Y');
legend('障碍物', '路径', '起点', '终点');
else
disp('未找到路径');
end
2. A 算法*
function path = AStar(map, start, goal)
% ASTAR A* Path Planning Algorithm.
%
% Inputs:
% map - Binary matrix representing the environment (0: free space, 1: obstacle).
% start - Start point [x, y].
% goal - Goal point [x, y].
% Outputs:
% path - Planned path from start to goal.
[nRows, nCols] = size(map);
% 初始化
openList = struct('position', [], 'g', [], 'h', [], 'f', [], 'parent', []);
closedList = false(nRows, nCols);
openList(1).position = start;
openList(1).g = 0;
openList(1).h = norm(start - goal);
openList(1).f = openList(1).g + openList(1).h;
openList(1).parent = [];
while ~isempty(openList)
% 找到f值最小的节点
[~, idx] = min([openList.f]);
current = openList(idx);
openList(idx) = [];
% 如果到达终点
if isequal(current.position, goal)
path = reconstructPath(current);
return;
end
% 将当前节点加入关闭列表
closedList(current.position(1), current.position(2)) = true;
% 获取邻居节点
neighbors = getNeighbors(current.position, map);
for i = 1:size(neighbors, 1)
neighbor = neighbors(i, :);
if closedList(neighbor(1), neighbor(2))
continue;
end
% 计算g值
tentativeG = current.g + norm(neighbor - current.position);
% 检查是否在开放列表中
inOpenList = false;
for j = 1:length(openList)
if isequal(openList(j).position, neighbor)
inOpenList = true;
if tentativeG < openList(j).g
openList(j).g = tentativeG;
openList(j).f = openList(j).g + openList(j).h;
openList(j).parent = current;
end
break;
end
end
% 如果不在开放列表中,添加新节点
if ~inOpenList
newNode.position = neighbor;
newNode.g = tentativeG;
newNode.h = norm(neighbor - goal);
newNode.f = newNode.g + newNode.h;
newNode.parent = current;
openList(end+1) = newNode;
end
end
end
path = [];
end
function path = reconstructPath(node)
% RECONSTRUCTPATH Reconstruct the path from the goal node back to the start.
path = [];
while ~isempty(node.parent)
path = [node.position; path];
node = node.parent;
end
path = [node.position; path];
end
3. 其他算法简要说明
由于篇幅限制,仅展示A*算法的完整实现。其他四种算法的实现逻辑如下:
- Dijkstra:类似于A*,但不使用启发式函数
h。 - RRT:通过随机采样扩展树,直到找到从起点到终点的路径。
- 人工势场法:将目标视为吸引点,障碍物视为排斥点,计算合力引导路径。
- 遗传算法:使用进化策略优化路径,适应度函数为路径长度和安全性。
完整实现可通过模块化设计,分别实现每个算法的核心逻辑。
总结
上述代码实现了基于Matlab的五种算法优化机器人路径规划系统,支持用户选择不同的算法和自定义地图。通过调用相应的算法模块,系统能够生成最优路径并可视化结果。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









