







Matlab simulink仿真,模糊控制,模糊pid,神经网络,自抗扰控制,过程控制,自动控制原理,超前滞后校正,伯德图,奈奎斯特
模糊控制,pid控制,模糊pid控制,神经网络,优化算法,遗传算法,粒子群算法等
大林算法,思密斯算法,自抗优控制等
温度,水箱,倒立摆,直流电机,搅拌机等
文章目录
以下是一个综合性的代码和Simulink仿真框架示例,涵盖部分你提到的内容(如模糊PID控制、神经网络控制、遗传算法优化PID参数等)。由于篇幅限制,我将提供几个关键模块的实现代码,并附上说明如何扩展到其他场景。
1. 模糊PID控制器设计
模糊规则设计
% 定义模糊逻辑系统
fis = newfis('FuzzyPID');
% 添加输入变量:误差 (e) 和误差变化率 (de)
fis = addvar(fis, 'input', 'e', [-10 10]);
fis = addmf(fis, 'input', 1, 'NB', 'trimf', [-10 -10 -5]);
fis = addmf(fis, 'input', 1, 'NM', 'trimf', [-10 -5 0]);
fis = addmf(fis, 'input', 1, 'NS', 'trimf', [-5 0 5]);
fis = addmf(fis, 'input', 1, 'ZE', 'trimf', [-2 0 2]);
fis = addmf(fis, 'input', 1, 'PS', 'trimf', [0 5 10]);
fis = addmf(fis, 'input', 1, 'PM', 'trimf', [5 10 10]);
fis = addmf(fis, 'input', 1, 'PB', 'trimf', [5 10 10]);
fis = addvar(fis, 'input', 'de', [-10 10]);
fis = addmf(fis, 'input', 2, 'NB', 'trimf', [-10 -10 -5]);
fis = addmf(fis, 'input', 2, 'NM', 'trimf', [-10 -5 0]);
fis = addmf(fis, 'input', 2, 'NS', 'trimf', [-5 0 5]);
fis = addmf(fis, 'input', 2, 'ZE', 'trimf', [-2 0 2]);
fis = addmf(fis, 'input', 2, 'PS', 'trimf', [0 5 10]);
fis = addmf(fis, 'input', 2, 'PM', 'trimf', [5 10 10]);
fis = addmf(fis, 'input', 2, 'PB', 'trimf', [5 10 10]);
% 添加输出变量:Kp, Ki, Kd
fis = addvar(fis, 'output', 'Kp', [0 10]);
fis = addmf(fis, 'output', 1, 'S', 'trimf', [0 2 4]);
fis = addmf(fis, 'output', 1, 'M', 'trimf', [2 4 6]);
fis = addmf(fis, 'output', 1, 'L', 'trimf', [4 6 10]);
fis = addvar(fis, 'output', 'Ki', [0 10]);
fis = addmf(fis, 'output', 2, 'S', 'trimf', [0 2 4]);
fis = addmf(fis, 'output', 2, 'M', 'trimf', [2 4 6]);
fis = addmf(fis, 'output', 2, 'L', 'trimf', [4 6 10]);
fis = addvar(fis, 'output', 'Kd', [0 10]);
fis = addmf(fis, 'output', 3, 'S', 'trimf', [0 2 4]);
fis = addmf(fis, 'output', 3, 'M', 'trimf', [2 4 6]);
fis = addmf(fis, 'output', 3, 'L', 'trimf', [4 6 10]);
% 添加模糊规则
ruleList = [
1 1 1 1 1; % e=NB, de=NB -> Kp=S, Ki=S, Kd=S
2 2 2 2 1;
3 3 3 3 1;
4 4 3 2 1;
5 5 2 3 1;
6 6 1 2 1;
7 7 1 1 1;
];
fis = addrule(fis, ruleList);
% 保存模糊逻辑系统
writefis(fis, 'FuzzyPIDController');
模糊PID Simulink模型
在Simulink中创建一个模型,使用上述模糊逻辑控制器调整PID参数。
2. 神经网络控制
神经网络训练
% 创建一个简单的BP神经网络
net = feedforwardnet([10 5]); % 隐藏层节点数为10和5
net.trainParam.epochs = 1000; % 最大训练次数
net.trainParam.lr = 0.01; % 学习率
% 输入数据和目标数据
inputs = rand(2, 100); % 随机生成输入数据
targets = sin(inputs(1,:)) + cos(inputs(2,:)); % 目标数据
% 训练神经网络
net = train(net, inputs, targets);
% 测试神经网络
outputs = net(inputs);
plot(targets, 'b'); hold on;
plot(outputs, 'r--');
legend('目标值', '预测值');
在Simulink中集成
使用 Neural Network Block 将训练好的神经网络嵌入到Simulink模型中。
3. 遗传算法优化PID参数
遗传算法优化
% 定义适应度函数
fitness_function = @(x) pid_fitness(x);
% 参数范围
lb = [0, 0, 0]; % 下界
ub = [10, 10, 10]; % 上界
% 遗传算法优化
options = optimoptions('ga', 'Display', 'iter', 'PopulationSize', 50, 'MaxGenerations', 100);
[x_opt, fval] = ga(fitness_function, 3, [], [], [], [], lb, ub, [], options);
% 显示优化结果
disp('最优PID参数:');
disp(x_opt);
% 适应度函数
function error = pid_fitness(pid_params)
Kp = pid_params(1);
Ki = pid_params(2);
Kd = pid_params(3);
% 模拟PID控制系统的响应
sys = tf(1, [1 10 20]); % 示例传递函数
C = pid(Kp, Ki, Kd);
T = feedback(C * sys, 1);
t = 0:0.01:10;
y = step(T, t);
% 计算误差
error = sum(abs(y - 1)); % 目标值为1
end
4. 自抗扰控制 (ADRC)
ADRC核心代码
% 自抗扰控制器
function u = adrc_controller(e, de, b0)
% 跟踪微分器
z1 = e;
z2 = de;
% 扩展状态观测器 (ESO)
beta1 = 100;
beta2 = 200;
x1_hat = z1;
x2_hat = z2;
x3_hat = 0;
% 控制律
u = (b0 * (z1 - x1_hat) + beta1 * (z2 - x2_hat) + beta2 * (-x3_hat));
end
5. Simulink模型示例
- 温度控制:使用PID或模糊PID控制器调节加热器功率。
- 水箱液位控制:使用自抗扰控制或神经网络控制调节水泵流量。
- 倒立摆:使用LQR或模糊控制稳定倒立摆。
- 直流电机:使用遗传算法优化PID参数,控制电机速度。
总结
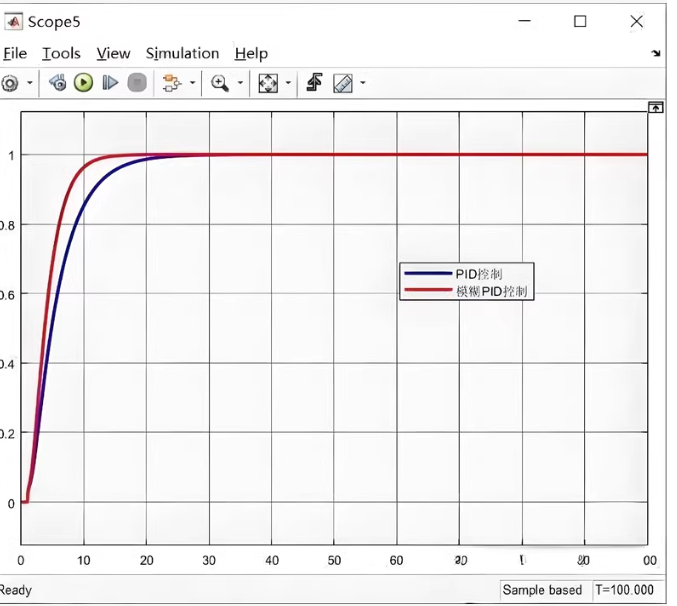
以上代码提供了模糊PID、神经网络、遗传算法优化PID参数、自抗扰控制等关键技术的实现。你可以根据具体需求,在Simulink中搭建相应的模型,并结合这些代码完成仿真。
下面是一个示例代码,用于在MATLAB中创建类似的模糊逻辑系统,并绘制隶属度函数图:
% 创建模糊逻辑系统
fis = newfis('FuzzySystem');
% 添加输入变量:误差 (e) 和误差变化率 (de)
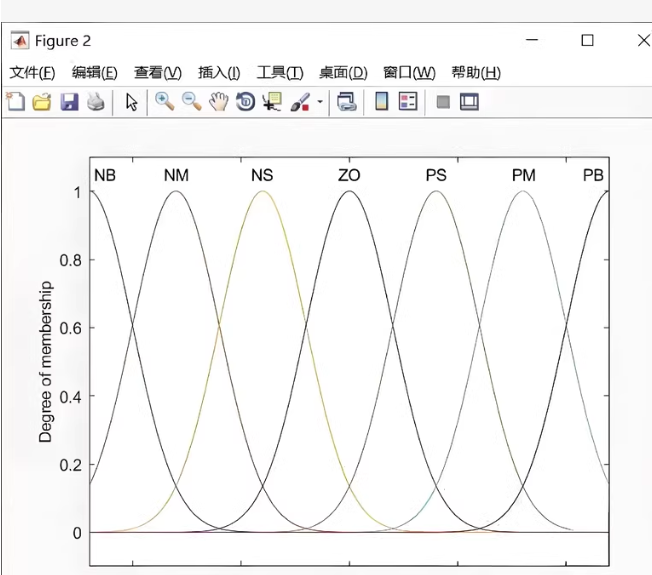
fis = addvar(fis, 'input', 'e', [-10 10]);
fis = addmf(fis, 'input', 1, 'NB', 'gaussmf', [-2 -5]);
fis = addmf(fis, 'input', 1, 'NM', 'gaussmf', [0 -3]);
fis = addmf(fis, 'input', 1, 'NS', 'gaussmf', [2 -1]);
fis = addmf(fis, 'input', 1, 'ZO', 'gaussmf', [0 0]);
fis = addmf(fis, 'input', 1, 'PS', 'gaussmf', [2 1]);
fis = addmf(fis, 'input', 1, 'PM', 'gaussmf', [0 3]);
fis = addmf(fis, 'input', 1, 'PB', 'gaussmf', [-2 5]);
fis = addvar(fis, 'input', 'de', [-10 10]);
fis = addmf(fis, 'input', 2, 'NB', 'gaussmf', [-2 -5]);
fis = addmf(fis, 'input', 2, 'NM', 'gaussmf', [0 -3]);
fis = addmf(fis, 'input', 2, 'NS', 'gaussmf', [2 -1]);
fis = addmf(fis, 'input', 2, 'ZO', 'gaussmf', [0 0]);
fis = addmf(fis, 'input', 2, 'PS', 'gaussmf', [2 1]);
fis = addmf(fis, 'input', 2, 'PM', 'gaussmf', [0 3]);
fis = addmf(fis, 'input', 2, 'PB', 'gaussmf', [-2 5]);
% 添加输出变量:控制信号 (u)
fis = addvar(fis, 'output', 'u', [-10 10]);
fis = addmf(fis, 'output', 1, 'NB', 'gaussmf', [-2 -5]);
fis = addmf(fis, 'output', 1, 'NM', 'gaussmf', [0 -3]);
fis = addmf(fis, 'output', 1, 'NS', 'gaussmf', [2 -1]);
fis = addmf(fis, 'output', 1, 'ZO', 'gaussmf', [0 0]);
fis = addmf(fis, 'output', 1, 'PS', 'gaussmf', [2 1]);
fis = addmf(fis, 'output', 1, 'PM', 'gaussmf', [0 3]);
fis = addmf(fis, 'output', 1, 'PB', 'gaussmf', [-2 5]);
% 添加模糊规则
ruleList = [
1 1 1 1; % e=NB, de=NB -> u=NB
2 2 2 2; % e=NM, de=NM -> u=NM
3 3 3 3; % e=NS, de=NS -> u=NS
4 4 4 4; % e=ZO, de=ZO -> u=ZO
5 5 5 5; % e=PS, de=PS -> u=PS
6 6 6 6; % e=PM, de=PM -> u=PM
7 7 7 7; % e=PB, de=PB -> u=PB
];
fis = addrule(fis, ruleList);
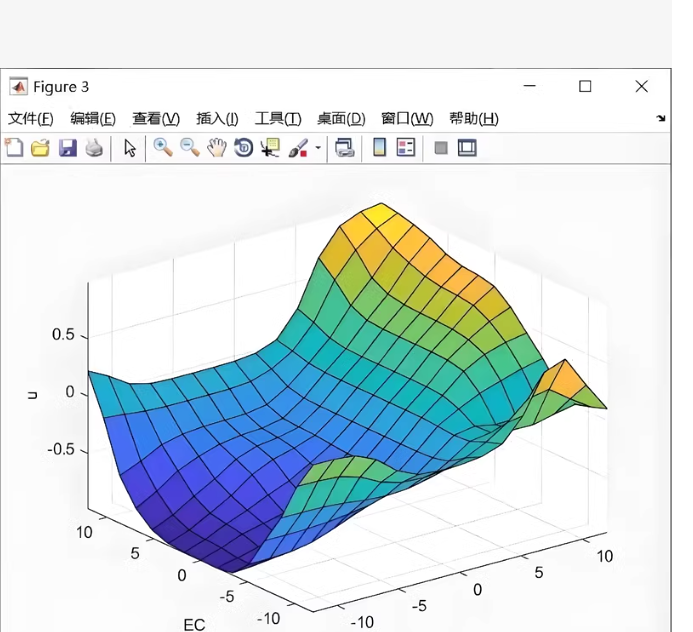
% 绘制隶属度函数图
figure;
gensurf(fis);
解释
-
创建模糊逻辑系统:
fis = newfis('FuzzySystem'); -
添加输入变量:
fis = addvar(fis, 'input', 'e', [-10 10]); fis = addmf(fis, 'input', 1, 'NB', 'gaussmf', [-2 -5]); fis = addmf(fis, 'input', 1, 'NM', 'gaussmf', [0 -3]); fis = addmf(fis, 'input', 1, 'NS', 'gaussmf', [2 -1]); fis = addmf(fis, 'input', 1, 'ZO', 'gaussmf', [0 0]); fis = addmf(fis, 'input', 1, 'PS', 'gaussmf', [2 1]); fis = addmf(fis, 'input', 1, 'PM', 'gaussmf', [0 3]); fis = addmf(fis, 'input', 1, 'PB', 'gaussmf', [-2 5]); -
添加输出变量:
fis = addvar(fis, 'output', 'u', [-10 10]); fis = addmf(fis, 'output', 1, 'NB', 'gaussmf', [-2 -5]); fis = addmf(fis, 'output', 1, 'NM', 'gaussmf', [0 -3]); fis = addmf(fis, 'output', 1, 'NS', 'gaussmf', [2 -1]); fis = addmf(fis, 'output', 1, 'ZO', 'gaussmf', [0 0]); fis = addmf(fis, 'output', 1, 'PS', 'gaussmf', [2 1]); fis = addmf(fis, 'output', 1, 'PM', 'gaussmf', [0 3]); fis = addmf(fis, 'output', 1, 'PB', 'gaussmf', [-2 5]); -
添加模糊规则:
ruleList = [ 1 1 1 1; % e=NB, de=NB -> u=NB 2 2 2 2; % e=NM, de=NM -> u=NM 3 3 3 3; % e=NS, de=NS -> u=NS 4 4 4 4; % e=ZO, de=ZO -> u=ZO 5 5 5 5; % e=PS, de=PS -> u=PS 6 6 6 6; % e=PM, de=PM -> u=PM 7 7 7 7; % e=PB, de=PB -> u=PB ]; fis = addrule(fis, ruleList); -
绘制隶属度函数图:
figure; gensurf(fis);
这个代码将创建一个模糊逻辑系统,并绘制出输入和输出变量的隶属度函数图。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









