






厚度:5mm
船的后面:7mm
高:3+6+1mm
长:250mm
增量放样
减量放样
背部小孔:距水平轴30mm,孔的半径5mm
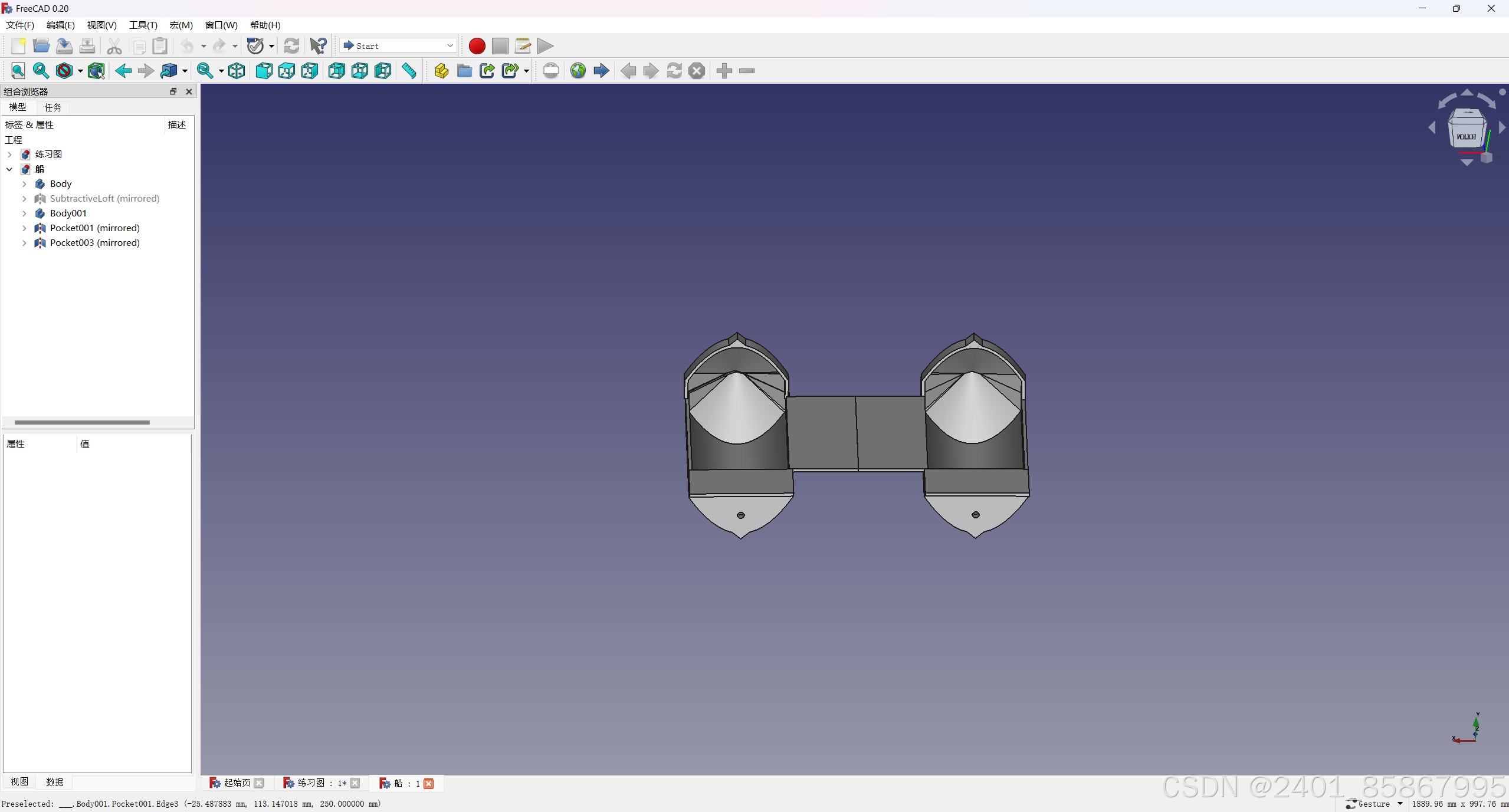
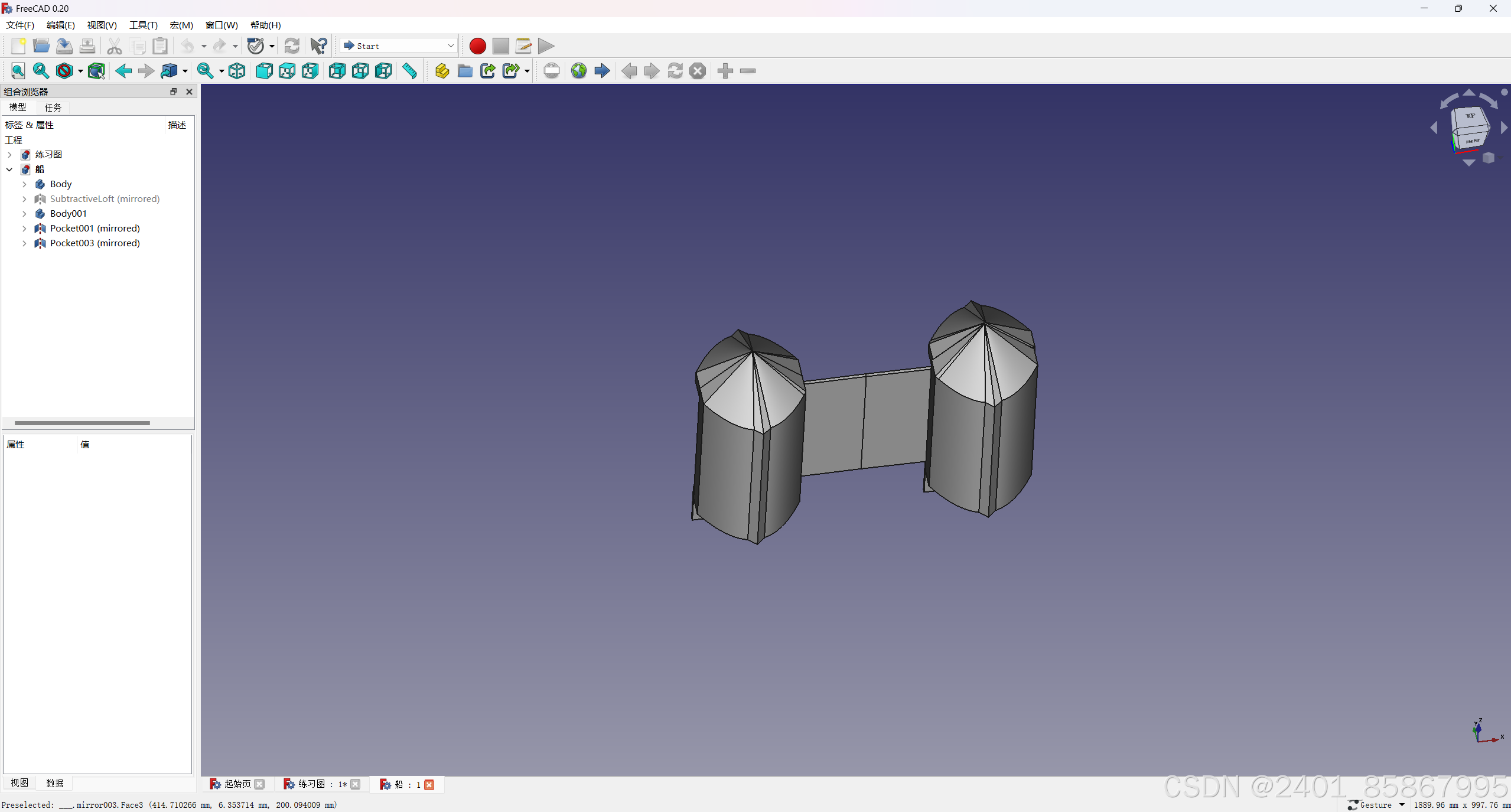
总体思路是为了增大船的浮力,设计两个小船,先设计右边部分,然后通过镜像弄出左边部分
具体画法:首先画一个长方形,抛物线,三角形组成一个闭合面,然后拉伸,拉伸后再建立草图,在刚才闭合面的基础上缩减5mm,然后关闭草图进行贯穿处理,之后在把之前的那个闭合面画出来,在画一个无限小的圆面,关闭草图后,点击增量放样,重复上一步操作,点击减量放样,这样就得到了船前面的部分,然后选中前面的部分,在Draft模式下选择镜像,这样就将船前面的下部分镜像上去了(这部分主要是防水作用),然后在船的背面打一个小孔,可以让电机的轴伸出来,在船的左侧设计一个板子,目的是放置题目一中设计的最小系统板stm32f103,之后切换到Draft界面,将右边部分镜像一下,得到最终的3D图形

















 511
511

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









