




CS285 持续更新
👉 GitHub仓库直达: https://github.com/CalebCheng819/cs285 (记得复制完整链接哦! )可以给个🌟吗
lecture 6
part1
我们定义state-action和state函数
Qπ(st,at)=∑t′=tTEπθ[r(st′,at′)∣st,at]Q^\pi\left(\mathbf{s}_t, \mathbf{a}_t\right)=\sum_{t^{\prime}=t}^T E_{\pi_\theta}\left[r\left(\mathbf{s}_{t^{\prime}}, \mathbf{a}_{t^{\prime}}\right) \mid \mathbf{s}_t, \mathbf{a}_t\right]Qπ(st,at)=∑t′=tTEπθ[r(st′,at′)∣st,at] : total reward from taking at\mathbf{a}_tat in st\mathbf{s}_tst
Vπ(st)=Eat∼πθ(at∣st)[Qπ(st,at)]:V^\pi\left(\mathbf{s}_t\right)=E_{\mathbf{a}_t \sim \pi_\theta\left(\mathbf{a}_t \mid \mathbf{s}_t\right)}\left[Q^\pi\left(\mathbf{s}_t, \mathbf{a}_t\right)\right]:Vπ(st)=Eat∼πθ(at∣st)[Qπ(st,at)]: total reward from st\mathbf{s}_tst
在此基础上,我们在定义一个advantage function
Aπ(st,at)=Qπ(st,at)−Vπ(st) : how much better at is
A^\pi\left(\mathbf{s}_t, \mathbf{a}_t\right)=Q^\pi\left(\mathbf{s}_t, \mathbf{a}_t\right)-V^\pi\left(\mathbf{s}_t\right) \text { : how much better } \mathbf{a}_t \text { is }
Aπ(st,at)=Qπ(st,at)−Vπ(st) : how much better at is
于是我们可以得到
Qπ(st,at)=r(st,at)+Est+1∼p(st+1∣st,at)[Vπ(st+1)]≈r(st,at)+Vπ(st+1)
Q^{\pi}(\mathbf{s}_{t},\mathbf{a}_{t})=r(\mathbf{s}_{t},\mathbf{a}_{t})+E_{\mathbf{s}_{t+1}\sim p(\mathbf{s}_{t+1}|\mathbf{s}_{t},\mathbf{a}_{t})}[V^{\pi}(\mathbf{s}_{t+1})]\approx r(\mathbf{s}_t,\mathbf{a}_t)+V^\pi(\mathbf{s}_{t+1})
Qπ(st,at)=r(st,at)+Est+1∼p(st+1∣st,at)[Vπ(st+1)]≈r(st,at)+Vπ(st+1)
Aπ(st,at)≈r(st,at)+Vπ(st+1)−Vπ(st) A^\pi(\mathbf{s}_t,\mathbf{a}_t)\approx r(\mathbf{s}_t,\mathbf{a}_t)+V^\pi(\mathbf{s}_{t+1})-V^\pi(\mathbf{s}_t) Aπ(st,at)≈r(st,at)+Vπ(st+1)−Vπ(st)
advantage function和state-action function都与action和state都有关系,而value function只与状态有关系
Monte Carlo policy function
对于单条轨迹来说
Vπ(st)≈∑t′=tTr(st′,at′)
V^\pi(\mathbf{s}_t)\approx\sum_{t^{\prime}=t}^Tr(\mathbf{s}_{t^{\prime}},\mathbf{a}_{t^{\prime}})
Vπ(st)≈t′=t∑Tr(st′,at′)
多轨迹采样
Vπ(st)≈1N∑i=1N∑t′=tTr(st′,at′)
V^\pi(\mathbf{s}_t)\approx\frac{1}{N}\sum_{i=1}^N\sum_{t^{\prime}=t}^Tr(\mathbf{s}_{t^{\prime}},\mathbf{a}_{t^{\prime}})
Vπ(st)≈N1i=1∑Nt′=t∑Tr(st′,at′)
虽然单轨迹时候效果不如多轨迹,但仍然pretty good,在数据有限的时候仍然可以使用
bootstrapped
yi,t=∑t′=tTEπθ[r(st′,at′)∣si,t]≈r(si,t,ai,t)+Vπ(si,t+1)≈r(si,t,ai,t)+V^ϕπ(si,t+1) y_{i,t}=\sum_{t^{\prime}=t}^TE_{\pi_\theta}\left[r(\mathbf{s}_{t^{\prime}},\mathbf{a}_{t^{\prime}})|\mathbf{s}_{i,t}\right]\approx r(\mathbf{s}_{i,t},\mathbf{a}_{i,t})+V^\pi(\mathbf{s}_{i,t+1})\approx r(\mathbf{s}_{i,t},\mathbf{a}_{i,t})+\hat{V}_\phi^\pi(\mathbf{s}_{i,t+1}) yi,t=t′=t∑TEπθ[r(st′,at′)∣si,t]≈r(si,t,ai,t)+Vπ(si,t+1)≈r(si,t,ai,t)+V^ϕπ(si,t+1)
这时候的训练数据就变成了
{(si,t,r(si,t,ai,t)+V^ϕπ(si,t+1))}
\left\{\left(\mathbf{s}_{i,t},r(\mathbf{s}_{i,t},\mathbf{a}_{i,t})+\hat{V}_{\phi}^{\pi}(\mathbf{s}_{i,t+1})\right)\right\}
{(si,t,r(si,t,ai,t)+V^ϕπ(si,t+1))}
相比蒙特卡洛方法,这种方法通常方差更小但可能更有偏差
part2
discount factors
对于episode length为无穷的,V^ϕπ\hat{V}_\phi^\piV^ϕπ会变得非常大,所以我们这里引入一个simple trick——discount factor
yi,t≈r(si,t,ai,t)+γV^ϕπ(si,t+1)
y_{i,t}\approx r(\mathbf{s}_{i,t},\mathbf{a}_{i,t})+\gamma\hat{V}_\phi^\pi(\mathbf{s}_{i,t+1})
yi,t≈r(si,t,ai,t)+γV^ϕπ(si,t+1)
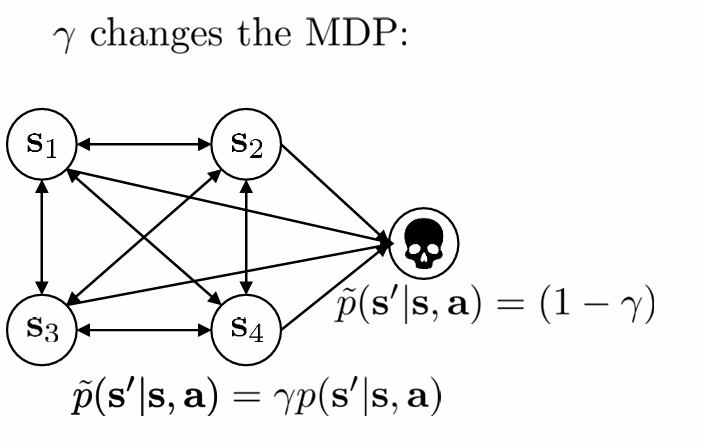
其中γ∈[0,1]\gamma\in[0,1]γ∈[0,1],0.99works well,γ\gammaγ会改变MDP的结构,对于每个时间步来说有1−γ1-\gamma1−γ的概率终止episode
对于actor-critic来说,我们可以引入discount factor写成
∇θJ(θ)≈1N∑i=1N∑t=1T∇θlogπθ(ai,t∣si,t)(r(si,t,ai,t)+γV^ϕπ(si,t+1)−V^ϕπ(si,t)⏞)
\begin{aligned}
&\nabla_\theta J(\theta) \approx \frac{1}{N} \sum_{i=1}^N \sum_{t=1}^T \nabla_\theta \log \pi_\theta\left(\mathbf{a}_{i, t} \mid \mathbf{s}_{i, t}\right)(\overbrace{r\left(\mathbf{s}_{i, t}, \mathbf{a}_{i, t}\right)+\gamma \hat{V}_\phi^\pi\left(\mathbf{s}_{i, t+1}\right)-\hat{V}_\phi^\pi\left(\mathbf{s}_{i, t}\right)})
\end{aligned}
∇θJ(θ)≈N1i=1∑Nt=1∑T∇θlogπθ(ai,t∣si,t)(r(si,t,ai,t)+γV^ϕπ(si,t+1)−V^ϕπ(si,t))
那么,对于Monte Carlo来说,有以下option,只用其中两个是正确的
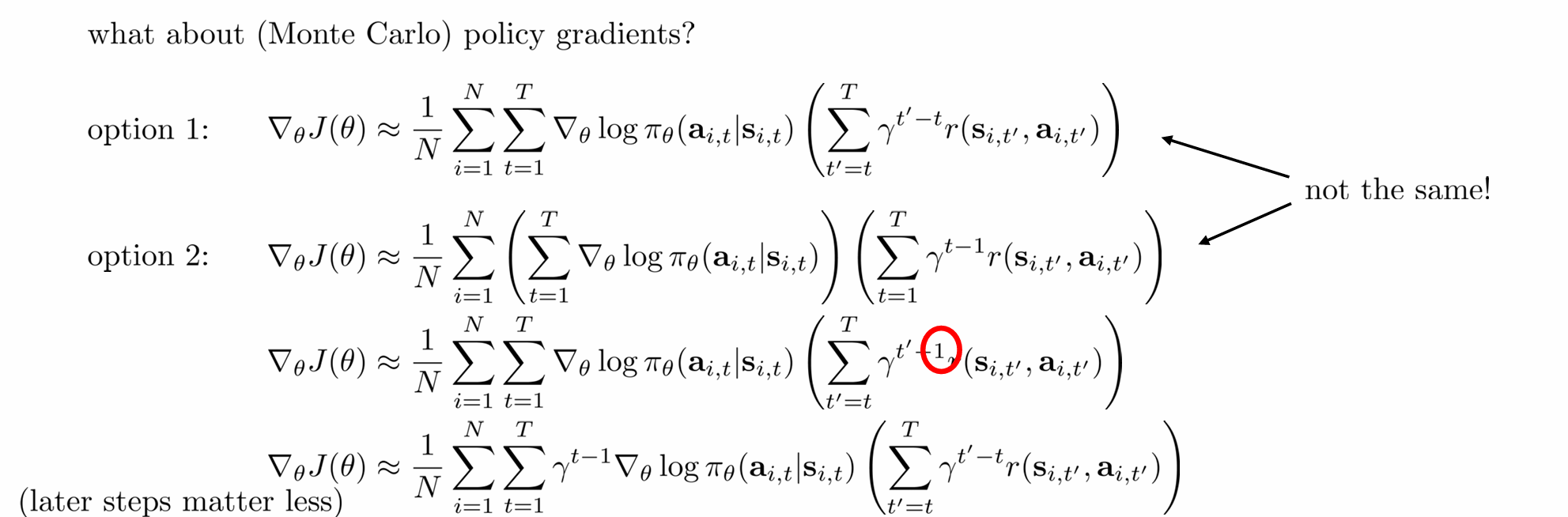
其中option2中的第一个它不是逐步计算,而是整体地计算策略对所有动作的 log-prob,再乘一个全局回报加权,这样的梯度是错误的估计
option2中的第二个,把 reward-to-go 部分的权重换成 γt−1\gamma^{t-1}γt−1,就错了!因为折扣应该是相对当前 ttt 的未来奖励,而不是绝对时间
但是,在实际使用中我们会使用option1,因为我们需要的一个一直好下去的动作,而不是只关注早期的行为
∇θJ(θ)≈1N∑i=1N∑t=1T∇θlogπθ(ai,t∣si,t)(∑t′=tTγt′−tr(si,t′,ai,t′))
\nabla_\theta J(\theta)\approx\frac{1}{N}\sum_{i=1}^N\sum_{t=1}^T\nabla_\theta\log\pi_\theta(\mathbf{a}_{i,t}|\mathbf{s}_{i,t})\left(\sum_{t^{\prime}=t}^T\gamma^{t^{\prime}-t}r(\mathbf{s}_{i,t^{\prime}},\mathbf{a}_{i,t^{\prime}})\right)
∇θJ(θ)≈N1i=1∑Nt=1∑T∇θlogπθ(ai,t∣si,t)(t′=t∑Tγt′−tr(si,t′,ai,t′))
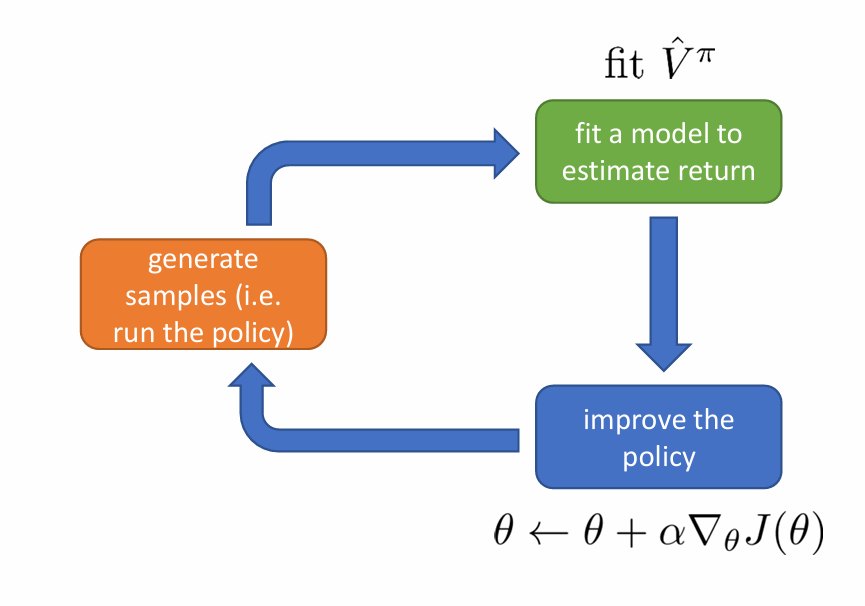
actor-critic algorithm
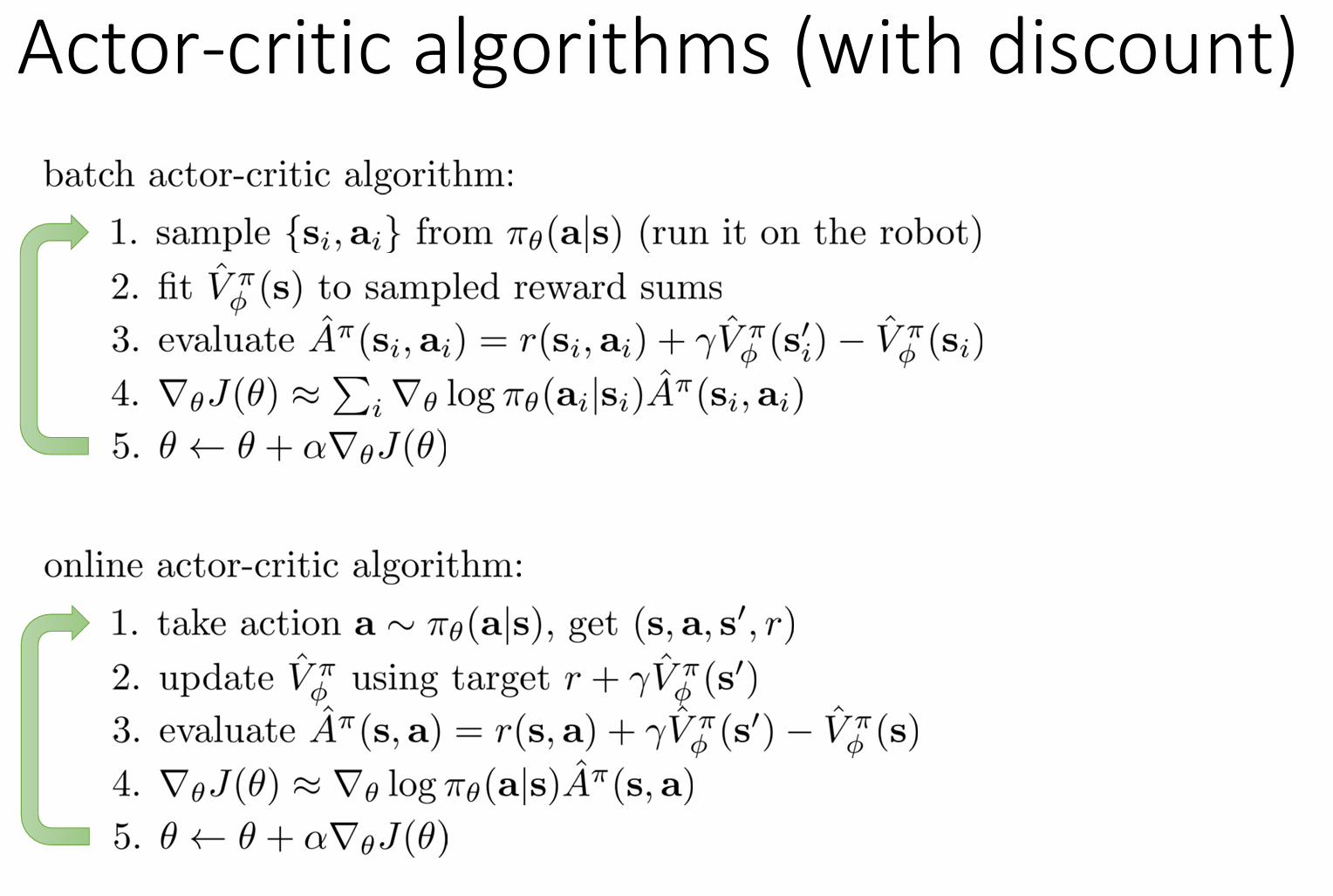
actor负责策略πθ\pi_\thetaπθ,选择动作。critic负责评估状态价值,引入advantage function计算策略梯度
| 对比维度 | Batch Actor-Critic | Online Actor-Critic |
|---|---|---|
| 数据收集方式 | 先收集一批数据(batch),再更新策略 | 单步交互后立即更新 |
| 计算效率 | 计算开销较大(需存储整个batch) | 计算开销较小(单步更新) |
| 样本相关性 | 数据相关性高(同一批数据多次使用) | 数据相关性低(单步数据) |
| 训练稳定性 | 更稳定(梯度基于大量数据计算) | 波动较大(单步数据噪声大) |
| 适用场景 | 适用于离线学习、仿真环境 | 适用于实时学习、机器人控制 |
| 探索能力 | 依赖batch数据,探索可能不足 | 可实时调整策略,探索性更强 |
| 实现复杂度 | 需要存储和管理batch数据 | 实现更简单,无需存储历史数据 |
part3
architecture design
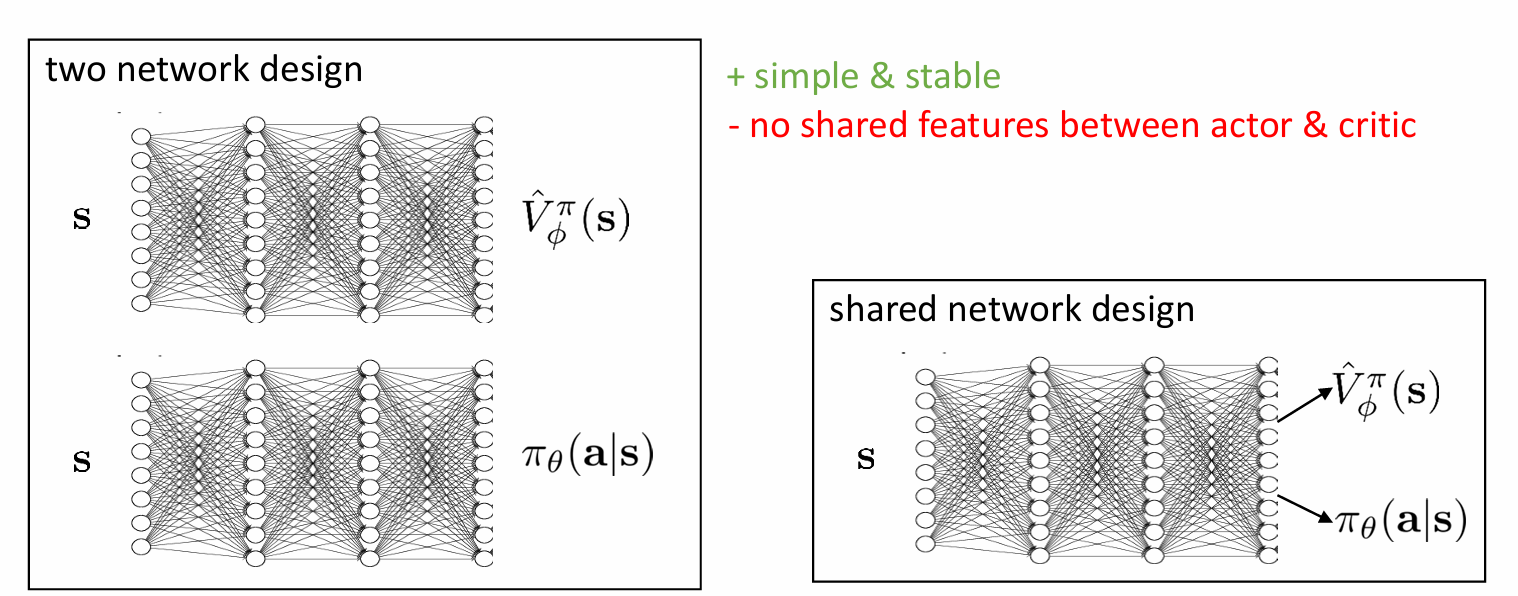
使用两个网络的优势是容易训练且稳定,缺点是没有共享feature,导致参数量增大,计算量也增大。而使用一个网络解决了两个网络的优势,但是有可能会出现两个部分冲突的问题。
并行化(Parallel Workers)
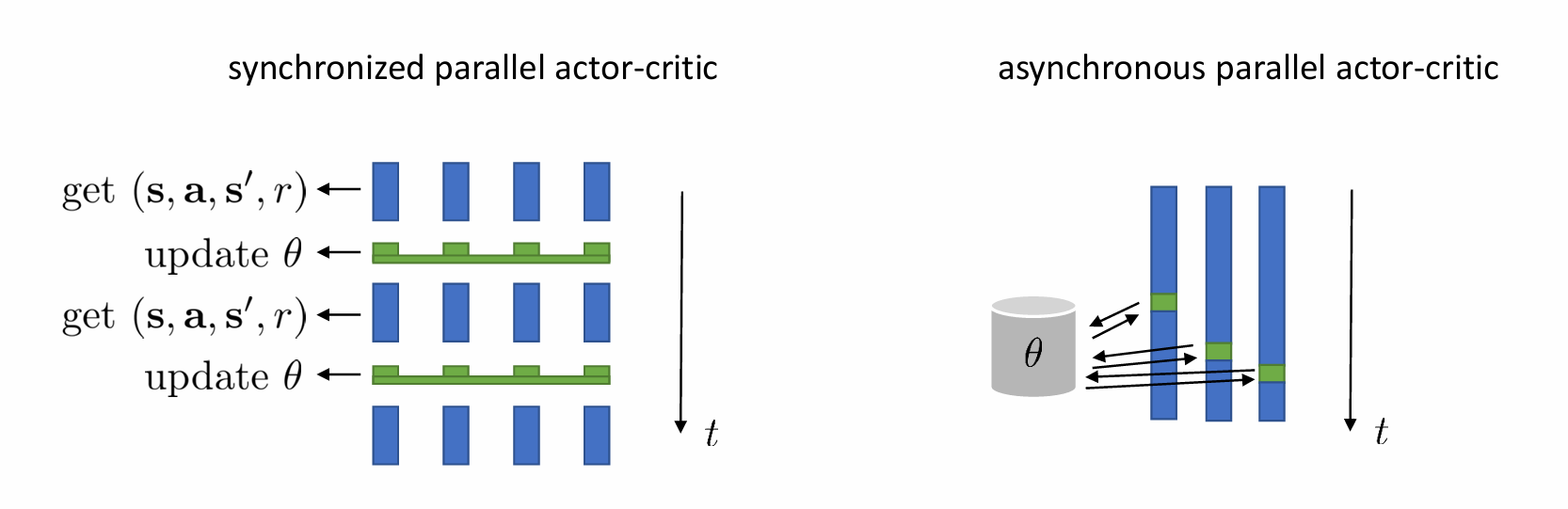
- 同步并行 Actor-Critic(Synchronized Parallel)
- 多个 Worker 同时与环境交互,收集数据。
- 同步更新:所有 Worker 完成一批数据后,统一计算梯度并更新策略。
- 优点:训练稳定,适用于分布式计算(如 A3C 的同步版本)。
- 缺点:速度受最慢 Worker 限制。
- 异步并行 Actor-Critic(Asynchronous Parallel, A3C)
- 每个 Worker 独立与环境交互,并 异步更新 全局策略。
- 优点:更快(无需等待所有 Worker),适用于多 CPU/GPU。
- 缺点:可能因异步更新导致策略震荡(需调整学习率)。
online actor-critic
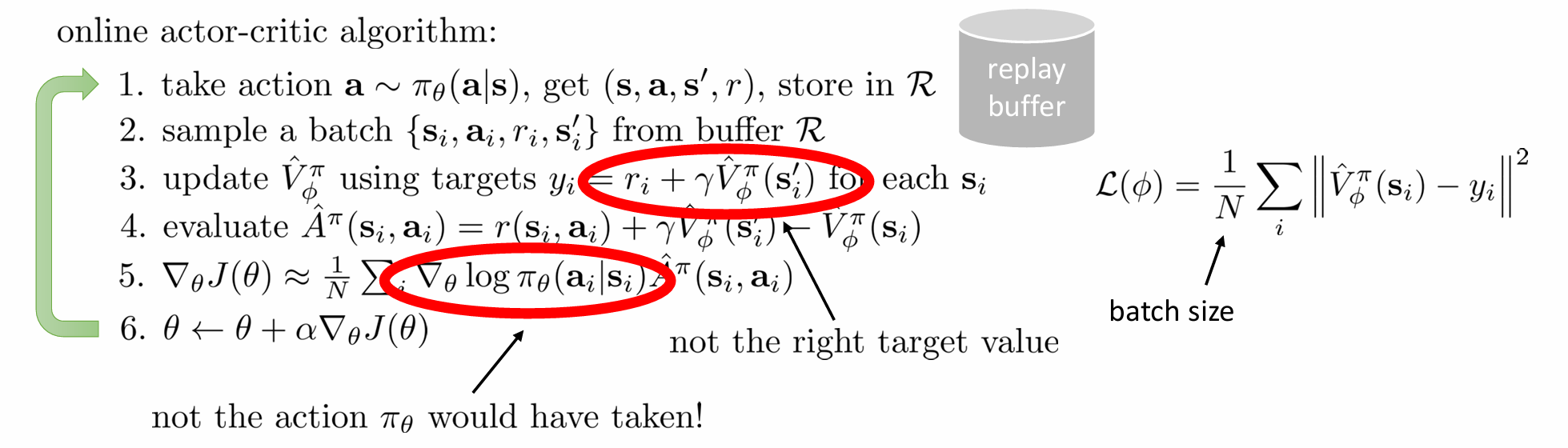
上述算法流程图中存在两个问题:
-
这是 on-policy 算法(如 A2C、PPO),要求数据必须来自当前策略 πθ,所以针对当前动作,我们应该采取state-action function,即修改
yi=ri+γQ^ϕπ(si′,ai′),ai′∼πθ(ai′∣si′) y_i=r_i+\gamma \hat{Q}_\phi^\pi\left(s_i^{\prime}, a_i^{\prime}\right), \quad a_i^{\prime} \sim \pi_\theta\left(a_i^{\prime} \mid s_i^{\prime}\right) yi=ri+γQ^ϕπ(si′,ai′),ai′∼πθ(ai′∣si′)
然后最小化均方误差(也是用Q function)
L(ϕ)=12∑i∥Q^ϕπ(si,ai)−yi∥2 \mathcal{L}(\phi)=\frac{1}{2} \sum_i\left\|\hat{Q}_\phi^\pi\left(s_i, a_i\right)-y_i\right\|^2 L(ϕ)=21i∑Q^ϕπ(si,ai)−yi2 -
回放缓冲区 RR 中的动作 aia_iai来自历史策略,但梯度计算假设它们来自当前策略 πθ\pi_\thetaπθ(即 未修正策略差异)。
当然,我么可以考虑从当前策略πθ\pi_\thetaπθ重新采样,但需额外采样,计算成本高。
所以在实际操作中,可以考虑直接用Q function近似处理,依赖Q函数的准确性(具体到动作)
∇θJ(θ)≈1N∑i∇θlogπθ(aiπ∣si)Q^π(si,aiπ) \nabla_\theta J(\theta) \approx \frac{1}{N} \sum_i \nabla_\theta \log \pi_\theta\left(\mathbf{a}_i^\pi \mid \mathbf{s}_i\right) \hat{Q}^\pi\left(\mathbf{s}_i, \mathbf{a}_i^\pi\right) ∇θJ(θ)≈N1i∑∇θlogπθ(aiπ∣si)Q^π(si,aiπ)
虽然这么操作会导致high variance,但是可以通过通常依赖大量采样平均。
当然除了上面两个明显的问题以外,仍然存在一定问题。
理想情况下,这个 sis_isi 应该来自于当前策略 πθ\pi_\thetaπθ 所诱导的状态分布 pθ(s)p_\theta(s)pθ(s)。
也就是说,pθ(s)p_\theta(s)pθ(s) 是“我们当前策略运行时会遇到的状态分布”。
但实际中,这些 sis_isi 是从经验池 R\mathcal{R}R 中采样的,可能来自:
- 旧版本策略 πθold\pi_{\theta_{old}}πθold;
- 各种 exploration noise;
- 甚至是 warm-up 初始策略。
这导致了一个重要的问题:
我们训练出来的策略 πθ\pi_\thetaπθ 不是在 pθ(s)p_\theta(s)pθ(s) 上最优的,而是在一个更宽泛(broader)的状态分布上最优。
强化学习的目标是:
maxθEs∼pθ(s),a∼πθ(a∣s)[r(s,a)]
\max_\theta \mathbb{E}_{s \sim p_\theta(s), a \sim \pi_\theta(a|s)} [r(s, a)]
θmaxEs∼pθ(s),a∼πθ(a∣s)[r(s,a)]
但我们实际优化的是:
Es∼R,a∼πθ(a∣s)[r(s,a)]
\mathbb{E}_{s \sim \mathcal{R}, a \sim \pi_\theta(a|s)} [r(s, a)]
Es∼R,a∼πθ(a∣s)[r(s,a)]
但,我们并无法解决,因为状态是不可控的 —— 我们不能直接从 pθ(s)p_\theta(s)pθ(s) 中采样;实际上我们甚至都不知道 pθ(s)p_\theta(s)pθ(s) 是什么;
在接下来的课程我们会讨论一些:
可以把随机采样 a∼πθ(a∣s)a \sim \pi_\theta(a|s)a∼πθ(a∣s) 变成“可导”的形式:
a=fθ(ϵ;s),ϵ∼N(0,1) a = f_\theta(\epsilon; s), \quad \epsilon \sim \mathcal{N}(0, 1) a=fθ(ϵ;s),ϵ∼N(0,1)
- 这样可以直接对 aaa 求导数,而不是用 log-derivative trick。
- 例如在 Soft Actor-Critic (SAC) 中使用了这个技巧。
也会学习用 确定性策略(如 DDPG、TD3)来替代当前的随机策略 πθ(a∣s)\pi_\theta(a|s)πθ(a∣s),它们不需要从策略中采样动作,而是直接输出一个 deterministic action:a=μθ(s)a = \mu_\theta(s)a=μθ(s)。
part4
critics as baseline
state dependent baseline
截至目前,我们学习了actor-critic
∇θJ(θ)≈1N∑i=1N∑t=1T∇θlogπθ(ai,t∣si,t)(r(si,t,ai,t)+γV^ϕπ(si,t+1)−V^ϕπ(si,t))
\nabla_\theta J(\theta)\approx\frac{1}{N}\sum_{i=1}^N\sum_{t=1}^T\nabla_\theta\log\pi_\theta(\mathbf{a}_{i,t}|\mathbf{s}_{i,t})\left(r(\mathbf{s}_{i,t},\mathbf{a}_{i,t})+\gamma\hat{V}_\phi^\pi(\mathbf{s}_{i,t+1})-\hat{V}_\phi^\pi(\mathbf{s}_{i,t})\right)
∇θJ(θ)≈N1i=1∑Nt=1∑T∇θlogπθ(ai,t∣si,t)(r(si,t,ai,t)+γV^ϕπ(si,t+1)−V^ϕπ(si,t))
以及policy gradient
∇θJ(θ)≈1N∑i=1N∑t=1T∇θlogπθ(ai,t∣si,t)((∑t′=tTγt′−tr(si,t′,ai,t′))−b)
\nabla_{\theta}J(\theta)\approx\frac{1}{N}\sum_{i=1}^{N}\sum_{t=1}^{T}\nabla_{\theta}\log\pi_{\theta}(\mathbf{a}_{i,t}|\mathbf{s}_{i,t})\left(\left(\sum_{t^{\prime}=t}^{T}\gamma^{t^{\prime}-t}r(\mathbf{s}_{i,t^{\prime}},\mathbf{a}_{i,t^{\prime}})\right)-b\right)
∇θJ(θ)≈N1i=1∑Nt=1∑T∇θlogπθ(ai,t∣si,t)((t′=t∑Tγt′−tr(si,t′,ai,t′))−b)
其中actor-critic具有lower variance但可能有偏(如果critic is not perfect),policy gradient具有no bias,但是higher variance(single-sample estimate)
于是我们提出两者结合的无偏状态基线
∇θJ(θ)≈1N∑i=1N∑t=1T∇θlogπθ(ai,t∣si,t)((∑t′=tTγt′−trt′)⏟蒙特卡洛回报−V^ϕπ(si,t)⏟状态相关基线)
\nabla_\theta J(\theta)\approx\frac{1}{N}\sum_{i=1}^N\sum_{t=1}^T\nabla_\theta\log\pi_\theta(\mathbf{a}_{i,t}|\mathbf{s}_{i,t})\left(\underbrace{\left(\sum_{t^{\prime}=t}^T\gamma^{t^{\prime}-t}r_{t^{\prime}}\right)}_{\text{蒙特卡洛回报}}-\underbrace{\hat{V}_\phi^\pi(\mathbf{s}_{i,t})}_{\text{状态相关基线}}\right)
∇θJ(θ)≈N1i=1∑Nt=1∑T∇θlogπθ(ai,t∣si,t)蒙特卡洛回报(t′=t∑Tγt′−trt′)−状态相关基线V^ϕπ(si,t)
这样子不仅无偏,且lower variance
action dependent baseline
首先引入一个控制变量的核心思想:
- 设 XXX 是我们想要估计的随机变量(高方差)
- 设 YYY 是与 XXX 相关的另一个随机变量(已知期望 E[Y]\mathbb{E}[Y]E[Y] )
- 构造新估计量:
Z=X−c(Y−E[Y]) Z=X-c(Y-\mathbb{E}[Y]) Z=X−c(Y−E[Y])
其中 ccc 是待优化的系数
关键性质:
- 无偏性: E[Z]=E[X]\mathbb{E}[Z]=\mathbb{E}[X]E[Z]=E[X](因为 E[Y−E[Y]]=0\mathbb{E}[Y-\mathbb{E}[Y]]=0E[Y−E[Y]]=0 )
- 方差缩减:当 XXX 和 YYY 高度相关时, Var(Z)<Var(X)\operatorname{Var}(Z)<\operatorname{Var}(X)Var(Z)<Var(X)
- 最优系数:c∗=Cov(X,Y)Var(Y)c^*=\frac{\operatorname{Cov}(X, Y)}{\operatorname{Var}(Y)}c∗=Var(Y)Cov(X,Y) 时方差最小

Q-Prop 提出了一种无偏的梯度估计器:
∇θJ(θ)≈1N∑i=1N∑t=1T∇θlogπθ(ai,t∣si,t)(Q^i,t−Qϕπ(si,t,ai,t))⏟带控制变量的蒙特卡洛估计 +1N∑i=1N∑t=1T∇θEat∼πθ[Qϕπ(si,t,at)]⏟基于 Critic 的策略梯度
\begin{aligned}
\nabla_\theta J(\theta) & \approx \underbrace{\frac{1}{N} \sum_{i=1}^N \sum_{t=1}^T \nabla_\theta \log \pi_\theta\left(a_{i, t} \mid s_{i, t}\right)\left(\hat{Q}_{i, t}-Q_\phi^\pi\left(s_{i, t}, a_{i, t}\right)\right)}_{\text {带控制变量的蒙特卡洛估计 }} \\
& +\underbrace{\frac{1}{N} \sum_{i=1}^N \sum_{t=1}^T \nabla_\theta \mathbb{E}_{a_t \sim \pi_\theta}\left[Q_\phi^\pi\left(s_{i, t}, a_t\right)\right]}_{\text {基于 Critic 的策略梯度 }}
\end{aligned}
∇θJ(θ)≈带控制变量的蒙特卡洛估计 N1i=1∑Nt=1∑T∇θlogπθ(ai,t∣si,t)(Q^i,t−Qϕπ(si,t,ai,t))+基于 Critic 的策略梯度 N1i=1∑Nt=1∑T∇θEat∼πθ[Qϕπ(si,t,at)]
其中:
−Q^i,t-\hat{Q}_{i, t}−Q^i,t 是蒙特卡洛估计的动作价值(即从时刻 t 到轨迹结束的累积奖励)。
−Qϕπ(si,t,ai,t)-Q_\phi^\pi\left(s_{i, t}, a_{i, t}\right)−Qϕπ(si,t,ai,t) 是Critic对动作价值的估计。
根据控制变量的核心思想,Q-Prop 的梯度估计器可重写为:
∇θJ=E[∇θlogπθ⋅(Q^−Qϕπ)]⏟控制变量项 +E[∇θEa[Qϕπ]]⏟Critic 主导项
\nabla_\theta J=\underbrace{\mathbb{E}\left[\nabla_\theta \log \pi_\theta \cdot\left(\hat{Q}-Q_\phi^\pi\right)\right]}_{\text {控制变量项 }}+\underbrace{\mathbb{E}\left[\nabla_\theta \mathbb{E}_a\left[Q_\phi^\pi\right]\right]}_{\text {Critic 主导项 }}
∇θJ=控制变量项 E[∇θlogπθ⋅(Q^−Qϕπ)]+Critic 主导项 E[∇θEa[Qϕπ]]
- 当 Critic 完美时 (Qϕπ=Qπ)\left(Q_\phi^\pi=Q^\pi\right)(Qϕπ=Qπ) ,第一项方差为零
- 当 Critic 较差时,第一项仍提供无偏的蒙特卡洛估计
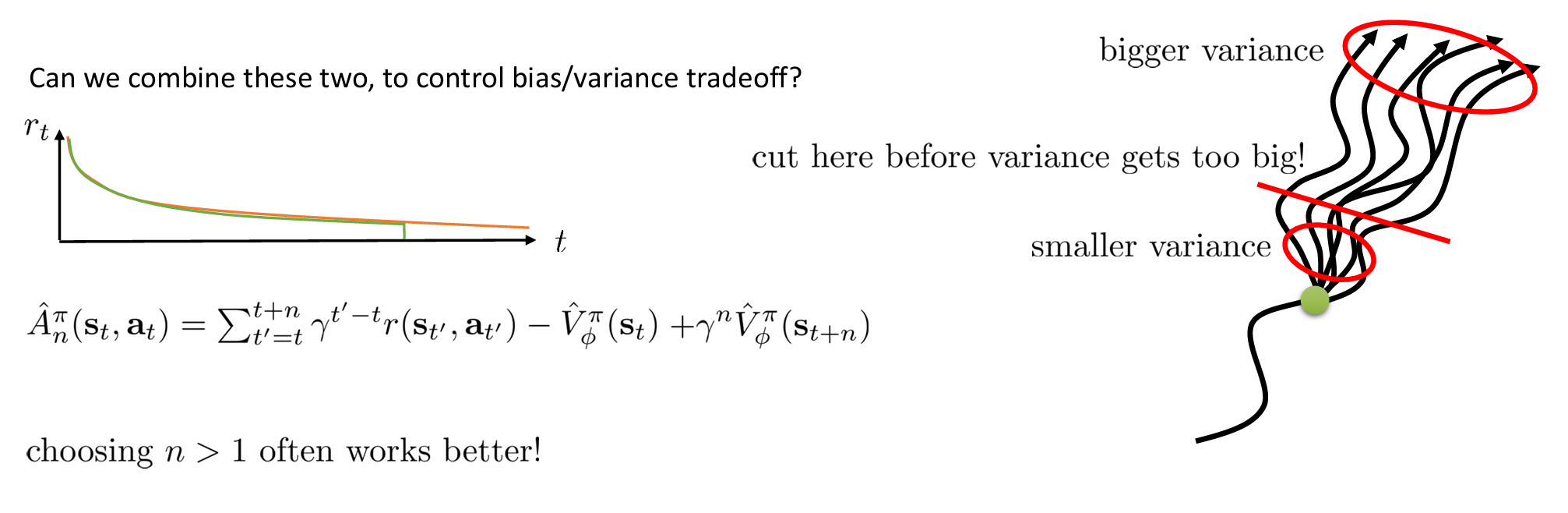
eligibility traces&n-step returns

n 步优势函数估计是强化学习中平衡偏差-方差权衡的核心技术
A^nπ(st,at)=∑t′=tt+nγt′−tr(st′,at′)−V^ϕπ(st)+γnV^ϕπ(st+n)
\hat{A}_n^\pi(\mathbf{s}_t,\mathbf{a}_t)=\sum_{t^{\prime}=t}^{t+n}\gamma^{t^{\prime}-t}r(\mathbf{s}_{t^{\prime}},\mathbf{a}_{t^{\prime}})-\hat{V}_\phi^\pi(\mathbf{s}_t)+\gamma^n\hat{V}_\phi^\pi(\mathbf{s}_{t+n})
A^nπ(st,at)=t′=t∑t+nγt′−tr(st′,at′)−V^ϕπ(st)+γnV^ϕπ(st+n)
| 项 | 数学表达式 | 物理意义 | 特性 |
|---|---|---|---|
| 实际奖励项 | ∑k=0n−1γkrt+k\sum_{k=0}^{n-1} \gamma^k r_{t+k}∑k=0n−1γkrt+k | 前 n 步的真实环境奖励 | 无偏但高方差 |
| 价值预测项 | γnV^ϕπ(st+n)\gamma^n \hat{V}_\phi^\pi\left(s_{t+n}\right)γnV^ϕπ(st+n) | Critic 对 n 步后状态的估值 | 低方差但可能有偏 |
| 基线项 | −V^ϕπ(st)-\hat{V}_\phi^\pi\left(s_t\right)−V^ϕπ(st) | 当前状态价值基准 | 降低方差,保持中心化 |
广义优势估计 (GAE) 是强化学习中用于平衡偏差-方差权衡的革命性技术它通过指数加权(可以视作discount factor)融合不同时间尺度的优势估计,解决了传统 n 步方法需要手动选择步长的痛点。
首先,我们给出state-action,state,advantage function的parameterγ\gammaγ形式
Vπ,γ(st):=Est+1:∞,at:∞,[∑l=0∞γlrt+l]Qπ,γ(st,at):=Est+1:∞,at+1:∞[∑l=0∞γlrt+l]Aπ,γ(st,at):=Qπ,γ(st,at)−Vπ,γ(st).
\begin{aligned}
V^{\pi, \gamma}\left(s_t\right) & :=\mathbb{E}_{\substack{s_{t+1: \infty}, a_{t: \infty}}},\left[\sum_{l=0}^{\infty} \gamma^l r_{t+l}\right] \quad Q^{\pi, \gamma}\left(s_t, a_t\right):=\mathbb{E}_{\substack{s_{t+1: \infty}, a_{t+1: \infty}}}\left[\sum_{l=0}^{\infty} \gamma^l r_{t+l}\right] \\
A^{\pi, \gamma}\left(s_t, a_t\right) & :=Q^{\pi, \gamma}\left(s_t, a_t\right)-V^{\pi, \gamma}\left(s_t\right) .
\end{aligned}
Vπ,γ(st)Aπ,γ(st,at):=Est+1:∞,at:∞,[l=0∑∞γlrt+l]Qπ,γ(st,at):=Est+1:∞,at+1:∞[l=0∑∞γlrt+l]:=Qπ,γ(st,at)−Vπ,γ(st).
引用原论文中的一个定义
Definition 1. The estimator A^t\hat{A}_tA^t is γ\gammaγ-just if
Es0:∞a0:∞[A^t(s0:∞,a0:∞)∇θlogπθ(at∣st)]=Es0:∞a0:∞[Aπ,γ(st,at)∇θlogπθ(at∣st)] \mathbb{E}_{\substack{s_{0: \infty} \\ a_{0: \infty}}}\left[\hat{A}_t\left(s_{0: \infty}, a_{0: \infty}\right) \nabla_\theta \log \pi_\theta\left(a_t \mid s_t\right)\right]=\mathbb{E}_{\substack{s_{0: \infty} \\ a_{0: \infty}}}\left[A^{\pi, \gamma}\left(s_t, a_t\right) \nabla_\theta \log \pi_\theta\left(a_t \mid s_t\right)\right] Es0:∞a0:∞[A^t(s0:∞,a0:∞)∇θlogπθ(at∣st)]=Es0:∞a0:∞[Aπ,γ(st,at)∇θlogπθ(at∣st)]
核心任务是对折扣优势函数 Aπ,γ(st,at)A^{\pi, \gamma}\left(s_t, a_t\right)Aπ,γ(st,at) 进行准确估计,得到 A^t\hat{A}_tA^t ,并将其用于构建策略梯度估计器,具体内容如下:
g^=1N∑n=1N∑t=0∞A^tn∇θlogπθ(atn∣stn)
\hat{g}=\frac{1}{N} \sum_{n=1}^N \sum_{t=0}^{\infty} \hat{A}_t^n \nabla_\theta \log \pi_\theta\left(a_t^n \mid s_t^n\right)
g^=N1n=1∑Nt=0∑∞A^tn∇θlogπθ(atn∣stn)
定义 带折扣因子的TD时序差分残差(Temporal Difference Error):
δtV=rt+γV^t+1−V^t
\delta_t^V=r_t+\gamma \hat{V}_{t+1}-\hat{V}_t
δtV=rt+γV^t+1−V^t
TD 残差 δtV\delta_t^VδtV 可被视为动作 ata_tat 的优势估计。实际上,当价值函数 VVV 完全准确(即 V=Vπ,γV=V^{\pi, \gamma}V=Vπ,γ ,与策略 π\piπ 和折扣 γ\gammaγ 对应的真实状态值函数一致)时,δtV\delta_t^VδtV 是一个 γ\gammaγ-just 优势估计器,并且是 Aπ,γA^{\pi, \gamma}Aπ,γ 的无偏估计器,证明如下:
Est+1[δtVπ,γ]=Est+1[rt+γVπ,γ(st+1)−Vπ,γ(st)]=Est+1[Qπ,γ(st,at)−Vπ,γ(st)]=Aπ,γ(st,at).
\begin{aligned}
\mathbb{E}_{s_{t+1}}\left[\delta_t^{V^{\pi, \gamma}}\right] & =\mathbb{E}_{s_{t+1}}\left[r_t+\gamma V^{\pi, \gamma}\left(s_{t+1}\right)-V^{\pi, \gamma}\left(s_t\right)\right] \\
& =\mathbb{E}_{s_{t+1}}\left[Q^{\pi, \gamma}\left(s_t, a_t\right)-V^{\pi, \gamma}\left(s_t\right)\right]=A^{\pi, \gamma}\left(s_t, a_t\right) .
\end{aligned}
Est+1[δtVπ,γ]=Est+1[rt+γVπ,γ(st+1)−Vπ,γ(st)]=Est+1[Qπ,γ(st,at)−Vπ,γ(st)]=Aπ,γ(st,at).
接下来,我们考率将δ\deltaδ全部相加,以此估计A^t(k)\hat{A}_t^{(k)}A^t(k)
A^t(1):=δtV=−V(st)+rt+γV(st+1)A^t(2):=δtV+γδt+1V=−V(st)+rt+γrt+1+γ2V(st+2)A^t(3):=δtV+γδt+1V+γ2δt+2V=−V(st)+rt+γrt+1+γ2rt+2+γ3V(st+3)A^t(k):=∑l=0k−1γlδt+lV=−V(st)+rt+γrt+1+⋯+γk−1rt+k−1+γkV(st+k)
\begin{aligned}
&\begin{array}{ll}
\hat{A}_t^{(1)}:=\delta_t^V & =-V\left(s_t\right)+r_t+\gamma V\left(s_{t+1}\right) \\
\hat{A}_t^{(2)}:=\delta_t^V+\gamma \delta_{t+1}^V & =-V\left(s_t\right)+r_t+\gamma r_{t+1}+\gamma^2 V\left(s_{t+2}\right) \\
\hat{A}_t^{(3)}:=\delta_t^V+\gamma \delta_{t+1}^V+\gamma^2 \delta_{t+2}^V & =-V\left(s_t\right)+r_t+\gamma r_{t+1}+\gamma^2 r_{t+2}+\gamma^3 V\left(s_{t+3}\right)
\end{array}\\
&\hat{A}_t^{(k)}:=\sum_{l=0}^{k-1} \gamma^l \delta_{t+l}^V=-V\left(s_t\right)+r_t+\gamma r_{t+1}+\cdots+\gamma^{k-1} r_{t+k-1}+\gamma^k V\left(s_{t+k}\right)
\end{aligned}
A^t(1):=δtVA^t(2):=δtV+γδt+1VA^t(3):=δtV+γδt+1V+γ2δt+2V=−V(st)+rt+γV(st+1)=−V(st)+rt+γrt+1+γ2V(st+2)=−V(st)+rt+γrt+1+γ2rt+2+γ3V(st+3)A^t(k):=l=0∑k−1γlδt+lV=−V(st)+rt+γrt+1+⋯+γk−1rt+k−1+γkV(st+k)
根据上述式子,我们很容易想到当k趋近于无穷时,有
A^t(∞)=∑l=0∞γlδt+lV=−V(st)+∑l=0∞γlrt+l
\hat{A}_t^{(\infty)}=\sum_{l=0}^{\infty} \gamma^l \delta_{t+l}^V=-V\left(s_t\right)+\sum_{l=0}^{\infty} \gamma^l r_{t+l}
A^t(∞)=l=0∑∞γlδt+lV=−V(st)+l=0∑∞γlrt+l
于是我们接下来定义generalized advantage estimator(GAE),如下
A^tGAE(γ,λ):=(1−λ)(A^t(1)+λA^t(2)+λ2A^t(3)+…)=(1−λ)(δtV+λ(δtV+γδt+1V)+λ2(δtV+γδt+1V+γ2δt+2V)+…)=(1−λ)(δtV(1+λ+λ2+…)+γδt+1V(λ+λ2+λ3+…)+γ2δt+2V(λ2+λ3+λ4+…)+…)=(1−λ)(δtV(11−λ)+γδt+1V(λ1−λ)+γ2δt+2V(λ21−λ)+…)=∑l=0∞(γλ)lδt+lV
\begin{aligned}
\hat{A}_t^{\mathrm{GAE}(\gamma, \lambda)} & :=(1-\lambda)\left(\hat{A}_t^{(1)}+\lambda \hat{A}_t^{(2)}+\lambda^2 \hat{A}_t^{(3)}+\ldots\right) \\
& =(1-\lambda)\left(\delta_t^V+\lambda\left(\delta_t^V+\gamma \delta_{t+1}^V\right)+\lambda^2\left(\delta_t^V+\gamma \delta_{t+1}^V+\gamma^2 \delta_{t+2}^V\right)+\ldots\right) \\
& =(1-\lambda)\left(\delta_t^V\left(1+\lambda+\lambda^2+\ldots\right)+\gamma \delta_{t+1}^V\left(\lambda+\lambda^2+\lambda^3+\ldots\right)\right. \\
& \left.\quad \quad+\gamma^2 \delta_{t+2}^V\left(\lambda^2+\lambda^3+\lambda^4+\ldots\right)+\ldots\right) \\
& =(1-\lambda)\left(\delta_t^V\left(\frac{1}{1-\lambda}\right)+\gamma \delta_{t+1}^V\left(\frac{\lambda}{1-\lambda}\right)+\gamma^2 \delta_{t+2}^V\left(\frac{\lambda^2}{1-\lambda}\right)+\ldots\right) \\
& =\sum_{l=0}^{\infty}(\gamma \lambda)^l \delta_{t+l}^V
\end{aligned}
A^tGAE(γ,λ):=(1−λ)(A^t(1)+λA^t(2)+λ2A^t(3)+…)=(1−λ)(δtV+λ(δtV+γδt+1V)+λ2(δtV+γδt+1V+γ2δt+2V)+…)=(1−λ)(δtV(1+λ+λ2+…)+γδt+1V(λ+λ2+λ3+…)+γ2δt+2V(λ2+λ3+λ4+…)+…)=(1−λ)(δtV(1−λ1)+γδt+1V(1−λλ)+γ2δt+2V(1−λλ2)+…)=l=0∑∞(γλ)lδt+lV
于是,我们定义the discounted policy gradient为
gγ≈E[∑t=0∞∇θlogπθ(at∣st)A^tGAE(γ,λ)]=E[∑t=0∞∇θlogπθ(at∣st)∑l=0∞(γλ)lδt+lV]
g^\gamma \approx \mathbb{E}\left[\sum_{t=0}^{\infty} \nabla_\theta \log \pi_\theta\left(a_t \mid s_t\right) \hat{A}_t^{\mathrm{GAE}(\gamma, \lambda)}\right]=\mathbb{E}\left[\sum_{t=0}^{\infty} \nabla_\theta \log \pi_\theta\left(a_t \mid s_t\right) \sum_{l=0}^{\infty}(\gamma \lambda)^l \delta_{t+l}^V\right]
gγ≈E[t=0∑∞∇θlogπθ(at∣st)A^tGAE(γ,λ)]=E[t=0∑∞∇θlogπθ(at∣st)l=0∑∞(γλ)lδt+lV]
adient为
gγ≈E[∑t=0∞∇θlogπθ(at∣st)A^tGAE(γ,λ)]=E[∑t=0∞∇θlogπθ(at∣st)∑l=0∞(γλ)lδt+lV]
g^\gamma \approx \mathbb{E}\left[\sum_{t=0}^{\infty} \nabla_\theta \log \pi_\theta\left(a_t \mid s_t\right) \hat{A}_t^{\mathrm{GAE}(\gamma, \lambda)}\right]=\mathbb{E}\left[\sum_{t=0}^{\infty} \nabla_\theta \log \pi_\theta\left(a_t \mid s_t\right) \sum_{l=0}^{\infty}(\gamma \lambda)^l \delta_{t+l}^V\right]
gγ≈E[t=0∑∞∇θlogπθ(at∣st)A^tGAE(γ,λ)]=E[t=0∑∞∇θlogπθ(at∣st)l=0∑∞(γλ)lδt+lV]


















 1249
1249

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









