




hw2
review
variance reduction
reward to go
为了减少式子中的causality,我们使用t到T-1的reward
∇θJ(θ)≈1N∑i=1N∑t=0T−1∇θlogπθ(ait∣sit)(∑t′=tT−1r(sit′,ait′))
\nabla_\theta J(\theta) \approx \frac{1}{N} \sum_{i=1}^N \sum_{t=0}^{T-1} \nabla_\theta \log \pi_\theta\left(a_{i t} \mid s_{i t}\right)\left(\sum_{t^{\prime}=t}^{T-1} r\left(s_{i t^{\prime}}, a_{i t^{\prime}}\right)\right)
∇θJ(θ)≈N1i=1∑Nt=0∑T−1∇θlogπθ(ait∣sit)(t′=t∑T−1r(sit′,ait′))
discounting
我们有两种方式,一种是一种是把discount加到full trajectory
∇θJ(θ)≈1N∑i=1N(∑t=0T−1∇θlogπθ(ait∣sit))(∑t′=0T−1γt′−1r(sit′,ait′))
\nabla_\theta J(\theta) \approx \frac{1}{N} \sum_{i=1}^N\left(\sum_{t=0}^{T-1} \nabla_\theta \log \pi_\theta\left(a_{i t} \mid s_{i t}\right)\right)\left(\sum_{t^{\prime}=0}^{T-1} \gamma^{t^{\prime}-1} r\left(s_{i t^{\prime}}, a_{i t^{\prime}}\right)\right)
∇θJ(θ)≈N1i=1∑N(t=0∑T−1∇θlogπθ(ait∣sit))(t′=0∑T−1γt′−1r(sit′,ait′))
另一种是把discount加到reward to go(推荐)
∇θJ(θ)≈1N∑i=1N∑t=0T−1∇θlogπθ(ait∣sit)(∑t′=tT−1γt′−tr(sit′,ait′))
\nabla_\theta J(\theta) \approx \frac{1}{N} \sum_{i=1}^N \sum_{t=0}^{T-1} \nabla_\theta \log \pi_\theta\left(a_{i t} \mid s_{i t}\right)\left(\sum_{t^{\prime}=t}^{T-1} \gamma^{t^{\prime}-t} r\left(s_{i t^{\prime}}, a_{i t^{\prime}}\right)\right)
∇θJ(θ)≈N1i=1∑Nt=0∑T−1∇θlogπθ(ait∣sit)(t′=t∑T−1γt′−tr(sit′,ait′))
baseline
我们考虑用一个state-independent(unbiased)的value function作为baseline
Vϕπ(st)≈∑t′=tT−1Eπθ[r(st′,at′)∣st]
V_\phi^\pi\left(s_t\right) \approx \sum_{t^{\prime}=t}^{T-1} \mathbb{E}_{\pi_\theta}\left[r\left(s_{t^{\prime}}, a_{t^{\prime}}\right) \mid s_t\right]
Vϕπ(st)≈t′=t∑T−1Eπθ[r(st′,at′)∣st]
∇θJ(θ)≈1N∑i=1N∑t=0T−1∇θlogπθ(ait∣sit)((∑t′=tT−1γt′−tr(sit′,ait′))−Vϕπ(sit)) \nabla_\theta J(\theta) \approx \frac{1}{N} \sum_{i=1}^N \sum_{t=0}^{T-1} \nabla_\theta \log \pi_\theta\left(a_{i t} \mid s_{i t}\right)\left(\left(\sum_{t^{\prime}=t}^{T-1} \gamma^{t^{\prime}-t} r\left(s_{i t^{\prime}}, a_{i t^{\prime}}\right)\right)-V_\phi^\pi\left(s_{i t}\right)\right) ∇θJ(θ)≈N1i=1∑Nt=0∑T−1∇θlogπθ(ait∣sit)((t′=t∑T−1γt′−tr(sit′,ait′))−Vϕπ(sit))
GAE
我们可以把advantage function这么表示
Aπ(st,at)=Qπ(st,at)−Vπ(st)
A^\pi\left(s_t, a_t\right)=Q^\pi\left(s_t, a_t\right)-V^\pi\left(s_t\right)
Aπ(st,at)=Qπ(st,at)−Vπ(st)
其中Q是通过Monte Carlo估计的,V是通过已经学习到的VϕπV_\phi^\piVϕπ。我们可以进一步降低方差利用VϕπV_\phi^\piVϕπ去替代Monte Carlo估计的Q。于是得到
Aπ(st,at)≈δt=r(st,at)+γVϕπ(st+1)−Vϕπ(st)
A^\pi\left(s_t, a_t\right) \approx \delta_t=r\left(s_t, a_t\right)+\gamma V_\phi^\pi\left(s_{t+1}\right)-V_\phi^\pi\left(s_t\right)
Aπ(st,at)≈δt=r(st,at)+γVϕπ(st+1)−Vϕπ(st)
但是这样子会因为VϕπV_\phi^\piVϕπ错误的modeling而引入新的bias,于是我么可以考虑引入n-step
Anπ(st,at)=∑t′=tt+nγt′−tr(st′,at′)+γnVϕπ(st+n+1)−Vϕπ(st)
A_n^\pi\left(s_t, a_t\right)=\sum_{t^{\prime}=t}^{t+n} \gamma^{t^{\prime}-t} r\left(s_{t^{\prime}}, a_{t^{\prime}}\right)+\gamma^n V_\phi^\pi\left(s_{t+n+1}\right)-V_\phi^\pi\left(s_t\right)
Anπ(st,at)=t′=t∑t+nγt′−tr(st′,at′)+γnVϕπ(st+n+1)−Vϕπ(st)
接下来,我们引入λ\lambdaλ引入指数加权,其中λ\lambdaλ属于[0,1]
AGAEπ(st,at)=1−λT−t−11−λ∑n=1T−t−1λn−1Anπ(st,at)
A_{G A E}^\pi\left(s_t, a_t\right)=\frac{1-\lambda^{T-t-1}}{1-\lambda} \sum_{n=1}^{T-t-1} \lambda^{n-1} A_n^\pi\left(s_t, a_t\right)
AGAEπ(st,at)=1−λ1−λT−t−1n=1∑T−t−1λn−1Anπ(st,at)
注意求和上限是T-t-1,当T趋近于无穷时,有
AGAEπ(st,at)=11−λ∑n=1∞λn−1Anπ(st,at)=∑t′=t∞(γλ)t′−tδt′
\begin{aligned}
A_{G A E}^\pi\left(s_t, a_t\right) & =\frac{1}{1-\lambda} \sum_{n=1}^{\infty} \lambda^{n-1} A_n^\pi\left(s_t, a_t\right) \\
& =\sum_{t^{\prime}=t}^{\infty}(\gamma \lambda)^{t^{\prime}-t} \delta_{t^{\prime}}
\end{aligned}
AGAEπ(st,at)=1−λ1n=1∑∞λn−1Anπ(st,at)=t′=t∑∞(γλ)t′−tδt′
最后,我们对finite的情况化简一下
AGAEπ(st,at)=∑t′=tT−1(γλ)t′−tδt′
A_{G A E}^\pi\left(s_t, a_t\right)=\sum_{t^{\prime}=t}^{T-1}(\gamma \lambda)^{t^{\prime}-t} \delta_{t^{\prime}}
AGAEπ(st,at)=t′=t∑T−1(γλ)t′−tδt′
于是,接下来我们可以用递归形式(便与写代码)
AGAEπ(st,at)=δt+γλAGAEπ(st+1,at+1)
A_{G A E}^\pi\left(s_t, a_t\right)=\delta_t+\gamma \lambda A_{G A E}^\pi\left(s_{t+1}, a_{t+1}\right)
AGAEπ(st,at)=δt+γλAGAEπ(st+1,at+1)
code
在配置环境前,会出现
note: This error originates from a subprocess, and is likely not a problem with pip.
ERROR: Failed building wheel for box2d-py
Running setup.py clean for box2d-py
Failed to build box2d-py
ERROR: Failed to build installable wheels for some pyproject.toml based projects (box2d-py)
后尝试先pip install swig后再pip install -r requirements.txt成功解决
在进行编译的时候还出现了
RuntimeError: module compiled against ABI version 0x1000009 but this version of numpy is 0x2000000
RuntimeError: module compiled against ABI version 0x1000009 but this version of numpy is 0x2000000
Traceback (most recent call last):
File "/home/robot/cjt_cs/cs285/cs285/code/homework_fall2023/hw2/cs285/scripts/run_hw2.py", line 14, in <module>
from cs285.infrastructure import utils
File "/home/robot/cjt_cs/cs285/cs285/code/homework_fall2023/hw2/cs285/infrastructure/utils.py", line 6, in <module>
import cv2
ImportError: numpy.core.multiarray failed to import
后先手动删除旧版本pip uninstall numpy opencv-python opencv-python-headless -y,再重新安装目前最稳定的兼容版本pip install numpy==1.24.4 opencv-python==4.7.0.72得以解决
当然在安装环境依赖的时候,也可以考虑使用清华镜像源pip install -r requirements.txt -i https://pypi.tuna.tsinghua.edu.cn/simple
networks
policies.py
在MLPPolicy中我们应该写forward和get_action这些函数,update应该更新到子类中,因为不同的policy会有不同的算法
_distribution
定义了如何根据输入的观测(observation)生成一个概率分布,用于从中采样动作。
def _distribution(self, obs: torch.FloatTensor) -> distributions.Distribution:
"""Returns a distribution over actions given an observation."""
if self.discrete:
logits = self.logits_net(obs)
return distributions.Categorical(logits=logits)
else:
mean = self.mean_net(obs)
std = torch.exp(self.logstd)
return distributions.Normal(mean, std)
-
如果环境的动作是离散的(例如:上下左右,0/1等),我们通常使用
Categorical分布。self.logits_net是一个神经网络,它接受观测obs并输出每个可能动作的logits(未归一化的对数概率)。 -
如果动作是连续的(例如:力的大小、角度等),我们使用正态分布
Normal。self.mean_net: 神经网络,输入观测obs,输出每个动作维度的均值。self.logstd: 是一个可学习的张量,表示对数标准差(log std),通过exp还原出标准差。
update
def update(
self,
obs: np.ndarray,
actions: np.ndarray,
advantages: np.ndarray,
) -> dict:
"""Implements the policy gradient actor update."""
obs = ptu.from_numpy(obs)
actions = ptu.from_numpy(actions)
advantages = ptu.from_numpy(advantages)
# TODO: implement the policy gradient actor update.
self.optimizer.zero_grad()
dist=self(obs)
logp=dist.log_prob(actions)#dist的性质计算对数概率
if logp.dim()>1:
logp=logp.sum(-1)
loss=-(logp*advantages).sum()#含有advantage不建议mean
loss.backward()
self.optimizer.step()
return {
"Actor Loss": ptu.to_numpy(loss),
}
update() 是每一步 actor 更新的过程,每一次更新都需要执行:
- 清空上一次的梯度(
zero_grad()); - 计算新一批数据的 loss(基于当前 obs, actions, advantages);
- 反向传播新 loss 的梯度;
- 更新网络参数(step)
其中因为 MLPPolicyPG 继承自 MLPPolicy,而 MLPPolicy 又继承自 nn.Module,这是 PyTorch 的神经网络模块的基类。在 nn.Module 中,已经实现了:
pythonCopyEditdef __call__(self, *input, **kwargs):
return self.forward(*input, **kwargs)
也就是说,当你调用 self(obs) 时,其实内部就是在调用 self.forward(obs)。
critics.py
forward
给定一个 batch 的 observation obs,返回网络预测的 V(s)V(s)V(s) 值。
def forward(self, obs: torch.Tensor) -> torch.Tensor:#
# TODO: implement the forward pass of the critic network
return self.network(obs).squeeze(-1) # Remove the last dimension
# This should return a tensor of shape (batch_size,) where each element corresponds to the
# value of the observation in the batch.
# If you want to keep the output as a 2D tensor with shape (batch_size, 1), you can remove the .squeeze(-1) part.
- 注意
squeeze(-1)是把形状(batch_size, 1)转成(batch_size,),以匹配后续计算。
update
def update(self, obs: np.ndarray, q_values: np.ndarray) -> dict:
obs = ptu.from_numpy(obs)
q_values = ptu.from_numpy(q_values)
# TODO: update the critic using the observations and q_values
self.optimizer.zero_grad()
predictions = self(obs)
loss = F.mse_loss(predictions, q_values)
loss.backward()
self.optimizer.step()
# The loss is the mean squared error between the predicted values and the target q_values.
# The target q_values are the expected returns for the given observations.
return {
"Baseline Loss": ptu.to_numpy(loss),
}
- loss计算也可以通过
loss = torch.square(self(obs) - q_values).mean()但更加推荐F.mse_loss(predictions, q_values)这个方法
agents
pg_agent
_calculate_q_vals
计算动作价值函数,关键特性:
- 同时依赖状态 和动作
- 包含即时奖励
def _calculate_q_vals(self, rewards: Sequence[np.ndarray]) -> Sequence[np.ndarray]:#Q相对于V多包含了一个即使奖励,返回的是一个列表
"""Monte Carlo estimation of the Q function."""
if not self.use_reward_to_go:
# Case 1: in trajectory-based PG, we ignore the timestep and instead use the discounted return for the entire
# trajectory at each point.
# In other words: Q(s_t, a_t) = sum_{t'=0}^T gamma^t' r_{t'}
# TODO: use the helper function self._discounted_return to calculate the Q-values
q_values = [np.array(self._discounted_return(r),dtype=np.float32) for r in rewards]
else:
# Case 2: in reward-to-go PG, we only use the rewards after timestep t to estimate the Q-value for (s_t, a_t).
# In other words: Q(s_t, a_t) = sum_{t'=t}^T gamma^(t'-t) * r_{t'}
# TODO: use the helper function self._discounted_reward_to_go to calculate the Q-values
q_values = [np.array(self._discounted_reward_to_go(r),dtype=np.float32) for r in rewards]
return q_values
-
额外引入一个_calculate_q_vals便于将多条轨迹的rewards拆分后处理
-
对于
q_values = [np.array(self._discounted_return(r),dtype=np.float32) for r in rewards]:假设你收集了一批
n条 trajectory,每条 trajectory 是一个长度为T_i的 reward 序列r_i,我们想对每条都计算它的 discounted return
_discounted_return
Return =∑t′=0Tγt′rt′ \text { Return }=\sum_{t^{\prime}=0}^T \gamma^{t^{\prime}} r_{t^{\prime}} Return =t′=0∑Tγt′rt′
返回一个具有相同total_return的列表
def _discounted_return(self, rewards: Sequence[float]) -> Sequence[float]:
"""
Helper function which takes a list of rewards {r_0, r_1, ..., r_t', ... r_T} and returns
a list where each index t contains sum_{t'=0}^T gamma^t' r_{t'}
Note that all entries of the output list should be the exact same because each sum is from 0 to T (and doesn't
involve t)!
"""
total_return = 0.0
for t, r in enumerate(rewards):
total_return += self.gamma ** t * r
return [total_return] * len(rewards) # Return the same value for each
# index, since the return is the same for all timesteps in the trajectory.
# This is because the return is calculated from the start of the trajectory to the end,
# and does not depend on the specific timestep t.
for t, r in ...:将每一对(index, value)解包为t(时间步索引)和r(该时间步的奖励值)。
_discounted_reward_to_go
Q(st,at)=∑t′=tTγt′−t⋅rt′ Q\left(s_t, a_t\right)=\sum_{t^{\prime}=t}^T \gamma^{t^{\prime}-t} \cdot r_{t^{\prime}} Q(st,at)=t′=t∑Tγt′−t⋅rt′
计算每一个时间步 t 对应的 Reward-to-Go 值,也就是从当前时间步开始,到轨迹终止为止的累计折扣回报,返回的是一个具有不同值的列表
def _discounted_reward_to_go(self, rewards: Sequence[float]) -> Sequence[float]:
"""
Helper function which takes a list of rewards {r_0, r_1, ..., r_t', ... r_T} and returns a list where the entry
in each index t' is sum_{t'=t}^T gamma^(t'-t) * r_{t'}.
"""
# batch_size = len(rewards)
# q_values = np.zeros(batch_size)
# for t in range(batch_size):
# for t_prime in range(t, batch_size):
# q_values[t] += (self.gamma ** (t_prime - t)) * rewards[t_prime]
# return q_values
returns,current_return = [], 0.0
for r in reversed(rewards):
current_return = r + self.gamma * current_return
returns.append(current_return)
returns.reverse()
return returns
# This function calculates the discounted reward-to-go for each timestep in the trajectory.
# It starts from the end of the trajectory and works backwards, accumulating the rewards while applying
# the discount factor. The result is a list where each entry corresponds to the total discounted
# reward from that timestep to the end of the trajectory.
- 在原始方式中,回报 GtG_tGt 是从当前时间步 ttt 开始,到episode结束所有奖励的加权和:
Gt=rt+γrt+1+γ2rt+2+⋯+γT−trT G_t = r_t + \gamma r_{t+1} + \gamma^2 r_{t+2} + \dots + \gamma^{T-t} r_T Gt=rt+γrt+1+γ2rt+2+⋯+γT−trT
这会导致一个嵌套循环。为了优化,可以使用 向后累加(reverse accumulation) 的单循环版本。
_estimate_advantage
策略梯度的目标是用:
∇θlogπθ(at∣st)⋅At
\nabla_\theta \log \pi_\theta(a_t | s_t) \cdot A_t
∇θlogπθ(at∣st)⋅At
其中 At=Q(st,at)−V(st)A_t = Q(s_t, a_t) - V(s_t)At=Q(st,at)−V(st)
def _estimate_advantage(
self,
obs: np.ndarray,
rewards: np.ndarray,
q_values: np.ndarray,
terminals: np.ndarray,
) -> np.ndarray:
"""Computes advantages by (possibly) subtracting a value baseline from the estimated Q-values.
Operates on flat 1D NumPy arrays.
"""
if self.critic is None:
# TODO: if no baseline, then what are the advantages?
advantages = q_values
else:
# TODO: run the critic and use it as a baseline
with torch.no_grad():
obs_tensor = ptu.from_numpy(obs)
values = self.critic(obs_tensor).cpu().numpy()
assert values.shape == q_values.shape
if self.gae_lambda is None:
# TODO: if using a baseline, but not GAE, what are the advantages?
advantages = q_values - values
else:
# TODO: implement GAE
batch_size = obs.shape[0]
# HINT: append a dummy T+1 value for simpler recursive calculation,方便递归
values = np.append(values, [0])
advantages = np.zeros(batch_size + 1)
for i in reversed(range(batch_size)):
# TODO: recursively compute advantage estimates starting from timestep T.
# HINT: use terminals to handle edge cases. terminals[i] is 1 if the state is the last in its
# trajectory, and 0 otherwise.
delta = rewards[i] + self.gamma * values[i + 1] * (1 - terminals[i]) - values[i]#在计算value函数时,考虑了gamma和终止状态
advantages[i] = delta + self.gamma * self.gae_lambda * advantages[i + 1] * (1 - terminals[i])#往回递归在外面加一个dummy
# remove dummy advantage
advantages = advantages[:-1]
# TODO: normalize the advantages to have a mean of zero and a standard deviation of one within the batch
if self.normalize_advantages:
advantages = (advantages - np.mean(advantages)) / (np.std(advantages) + 1e-8)
# This normalization helps stabilize training by ensuring that the advantages have a consistent scale.
# It prevents large advantages from disproportionately influencing the policy updates, which can lead to
# instability in the learning process.
return advantages
-
如果没有
baseline(即 critic),那就用 At=Q(st,at)A_t = Q(s_t, a_t)At=Q(st,at) -
有 baseline,可以减少方差,用 At=Q(st,at)−V(st)A_t = Q(s_t, a_t) - V(s_t)At=Q(st,at)−V(st),在计算value的时候,记得
with torch.no_grad(): -
terminals就是一个布尔列表:每一个元素
terminals[t]表示第t步是否为终止状态(True表示终止,False表示还在进行中);如果你使用如
OpenAI Gym或CS285框架,terminals通常是由env.step()的done字段得到的。 -
delta(TD error) 是:
δt=rt+γV(st+1)−V(st) \delta_t = r_t + \gamma V(s_{t+1}) - V(s_t) δt=rt+γV(st+1)−V(st)
如果terminals[i] == 1(即 episode 结束),那么 δt=rt−V(st)\delta_t = r_t - V(s_t)δt=rt−V(st)。 -
append dummy 值为了在循环中方便地处理 V(st+1)V(s_{t+1})V(st+1),防止越界。
-
归一化 (
normalize_advantages):- 这一步是为了提升训练稳定性。
- 处理后的 advantage 有零均值和单位标准差,有助于减小梯度爆炸/消失的风险。
update
整个函数的流程图
采样的多个 trajectory
└── obs, actions, rewards, terminals
└──➡ _calculate_q_vals(rewards)
└── q_values (list)
└──➡ flatten 成 batch
└── obs, actions, q_values, rewards, terminals
└──➡ _estimate_advantage()
└── advantages
└──➡ actor.update()
└── info dict
└──(optional) critic.update()
└── 更新 info dict
def update(
self,
obs: Sequence[np.ndarray],
actions: Sequence[np.ndarray],
rewards: Sequence[np.ndarray],
terminals: Sequence[np.ndarray],
) -> dict:
"""The train step for PG involves updating its actor using the given observations/actions and the calculated
qvals/advantages that come from the seen rewards.
Each input is a list of NumPy arrays, where each array corresponds to a single trajectory. The batch size is the
total number of samples across all trajectories (i.e. the sum of the lengths of all the arrays).
"""
# obs = np.concatenate(obs, axis=0) # shape (batch_size, ob_dim)
# actions = np.concatenate(actions, axis=0) # shape (batch_size, ac_dim)
# terminals = np.concatenate(terminals, axis=0) # shape (batch_size,
# step 1: calculate Q values of each (s_t, a_t) point, using rewards (r_0, ..., r_t, ..., r_T)
q_values: Sequence[np.ndarray] = self._calculate_q_vals(rewards)
# q_values should be a list of NumPy arrays, where each array corresponds to a single trajectory.
# this line flattens it into a single NumPy array.
# q_values = np.concatenate(q_values, axis=0) # shape (batch_size,)
# TODO: flatten the lists of arrays into single arrays, so that the rest of the code can be written in a vectorized
# way. obs, actions, rewards, terminals, and q_values should all be arrays with a leading dimension of `batch_size`
# beyond this point.
obs = self.safe_concatenate("obs", obs) # shape (batch_size, ob_dim)
actions = self.safe_concatenate("actions", actions) # shape (batch_size, ac_dim)
rewards = self.safe_concatenate("rewards", rewards) # shape (batch_size,)
q_values = self.safe_concatenate("q_values", q_values) # shape (batch_size,)
terminals = self.safe_concatenate("terminals", terminals) # shape (batch_size,)
# step 2: calculate advantages from Q values
advantages: np.ndarray = self._estimate_advantage(
obs, rewards, q_values, terminals
)
# step 3: use all datapoints (s_t, a_t, adv_t) to update the PG actor/policy
# TODO: update the PG actor/policy network once using the advantages
info: dict = self.actor.update(obs, actions, advantages)
# step 4: if needed, use all datapoints (s_t, a_t, q_t) to update the PG critic/baseline
if self.critic is not None:
# TODO: perform `self.baseline_gradient_steps` updates to the critic/baseline network
for _ in range(self.baseline_gradient_steps):
critic_info: dict = self.critic.update(obs, q_values)
# critic_info should contain the loss and any other metrics you want to log.
# You can use critic_info to log the critic's performance.
info.update(critic_info)
# critic_info should contain the loss and any other metrics you want to log.
# You can use critic_info to log the critic's performance.
return info
-
首先计算q值,在计算q值的时候,rewards是一个含有多条轨迹的列表
-
然后把这些数据“打平”为一个批次(
batch_size = 所有时间步总和),才能做向量化训练。 -
因为_estimate_advantage传入的参数是已经被打平的numpy,所以在计算advantage前需要展平
def _estimate_advantage( self, obs: np.ndarray, rewards: np.ndarray, q_values: np.ndarray, terminals: np.ndarray, ) -> np.ndarray: -
如果使用了基线(baseline),就要训练一个 critic 网络去拟合
q_values。执行若干次 critic 更新,并将 critic 的日志信息更新到
info中。
scripts
run_hw2.py
run_training_loop
# add action noise, if needed
if args.action_noise_std > 0:
assert not discrete, f"Cannot use --action_noise_std for discrete environment {args.env_name}"
env = ActionNoiseWrapper(env, args.seed, args.action_noise_std)
在连续动作空间的环境中,添加动作噪声(action noise)以增强策略探索能力。
for itr in range(args.n_iter):
print(f"\n********** Iteration {itr} ************")
# TODO: sample `args.batch_size` transitions using utils.sample_trajectories
# make sure to use `max_ep_len`
trajs, envsteps_this_batch = utils.sample_trajectories(env,agent.actor,args.batch_size,max_ep_len) # TODO
total_envsteps += envsteps_this_batch
-
在这里面的sample_trajectories,参数应该是agent.actor和args.batch_size
-
在 CS285 框架中,一个
agent往往是一个类(比如PGAgent),里面包含了多个模块,例如:pythonCopyEditclass PGAgent: def __init__(self): self.actor = MLPPolicy(...) self.replay_buffer = ... self.critic = ...其中,
actor是负责给定状态 sss 产生动作 aaa 的策略(policy),是我们真正要在环境中 roll out 的“智能体”。所以,
agent.actor表示从这个 agent 里 拿出策略网络(policy),用于采样轨迹(trajectory)。 -
args.batch_size在 CS285 的代码框架中,实际上是表示“每个策略更新批次中总共收集多少个时间步(timesteps)”,而不是传统意义上神经网络中的“样本个数”的 batch size。
-
trajs_dict = {k: [traj[k] for traj in trajs] for k in trajs[0]}
# TODO: train the agent using the sampled trajectories and the agent's update function
train_info: dict = agent.update(
obs=trajs_dict["observation"],
actions=trajs_dict["action"],
rewards=trajs_dict["reward"],
terminals=trajs_dict["terminal"],
)
-
外层字典推导式:
{k: ... for k in trajs[0]}- 遍历第一个 trajectory 的所有键(如
'observation','action','reward') - 也就是说:对于每种 key,我们要收集所有轨迹中的对应值
内层列表推导式:
[traj[k] for traj in trajs]- 对于每一条轨迹
traj,提取当前 key(例如'reward')对应的值 - 最终生成一个列表:这个 key 在所有 trajectory 中的值的集合
- 遍历第一个 trajectory 的所有键(如
experiments
reward to go&&normalize_advantages
python cs285/scripts/run_hw2.py --env_name CartPole-v0 -n 100 -b 1000 \
--exp_name cartpole
python cs285/scripts/run_hw2.py --env_name CartPole-v0 -n 100 -b 1000 \
-rtg --exp_name cartpole_rtg
python cs285/scripts/run_hw2.py --env_name CartPole-v0 -n 100 -b 1000 \
-na --exp_name cartpole_na
python cs285/scripts/run_hw2.py --env_name CartPole-v0 -n 100 -b 1000 \
-rtg -na --exp_name cartpole_rtg_na
python cs285/scripts/run_hw2.py --env_name CartPole-v0 -n 100 -b 4000 \
--exp_name cartpole_lb
python cs285/scripts/run_hw2.py --env_name CartPole-v0 -n 100 -b 4000 \
-rtg --exp_name cartpole_lb_rtg
python cs285/scripts/run_hw2.py --env_name CartPole-v0 -n 100 -b 4000 \
-na --exp_name cartpole_lb_na
python cs285/scripts/run_hw2.py --env_name CartPole-v0 -n 100 -b 4000 \
-rtg -na --exp_name cartpole_lb_rtg_na
相应文件位置:
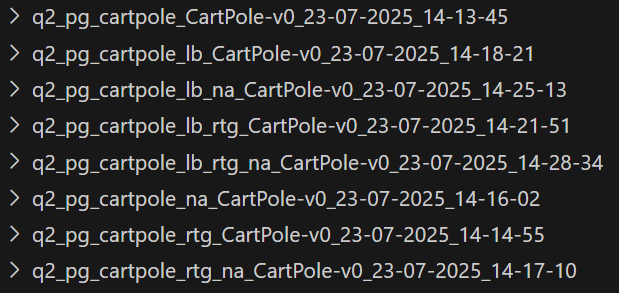
小batch_size:
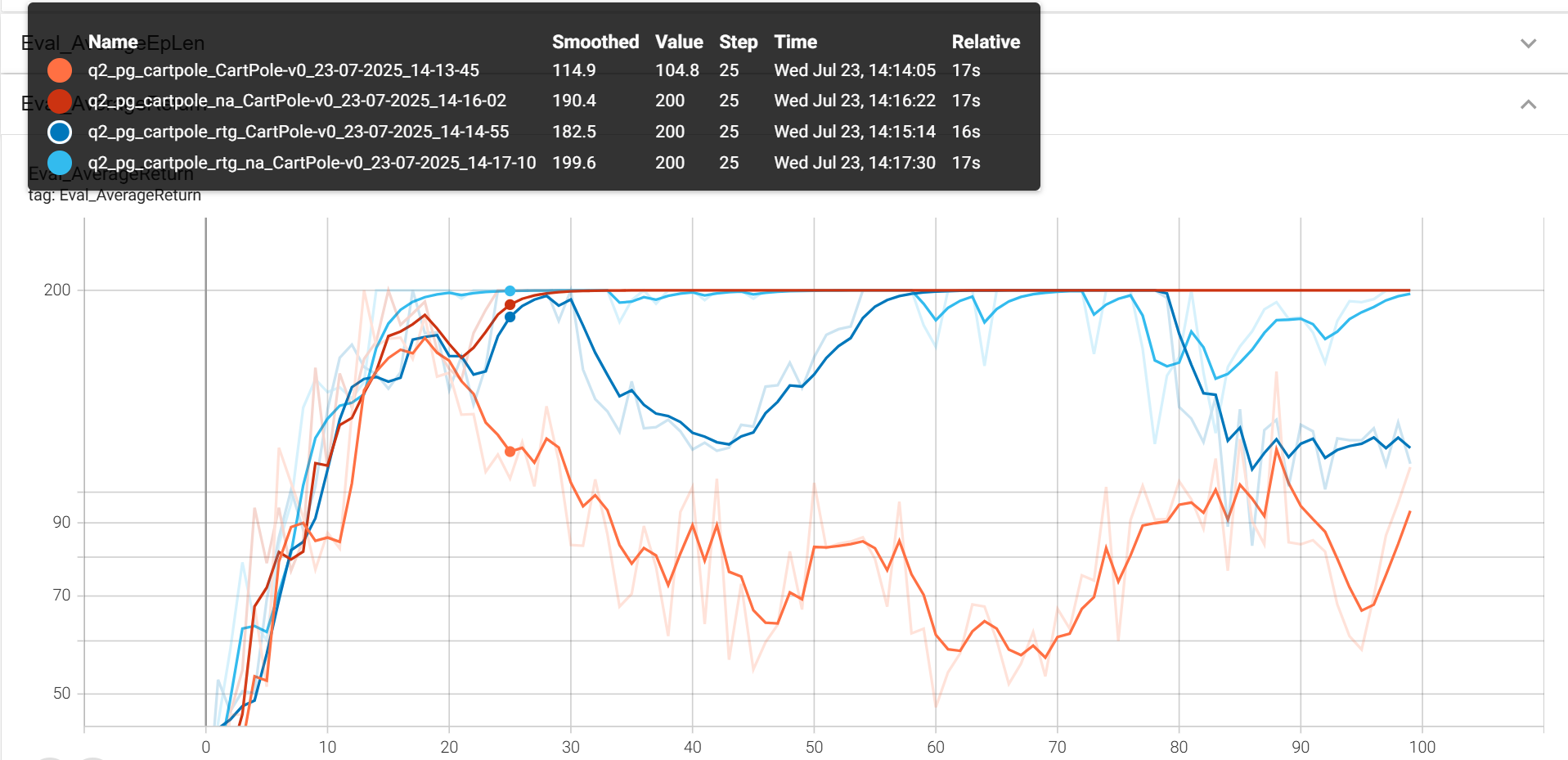
大batch_size
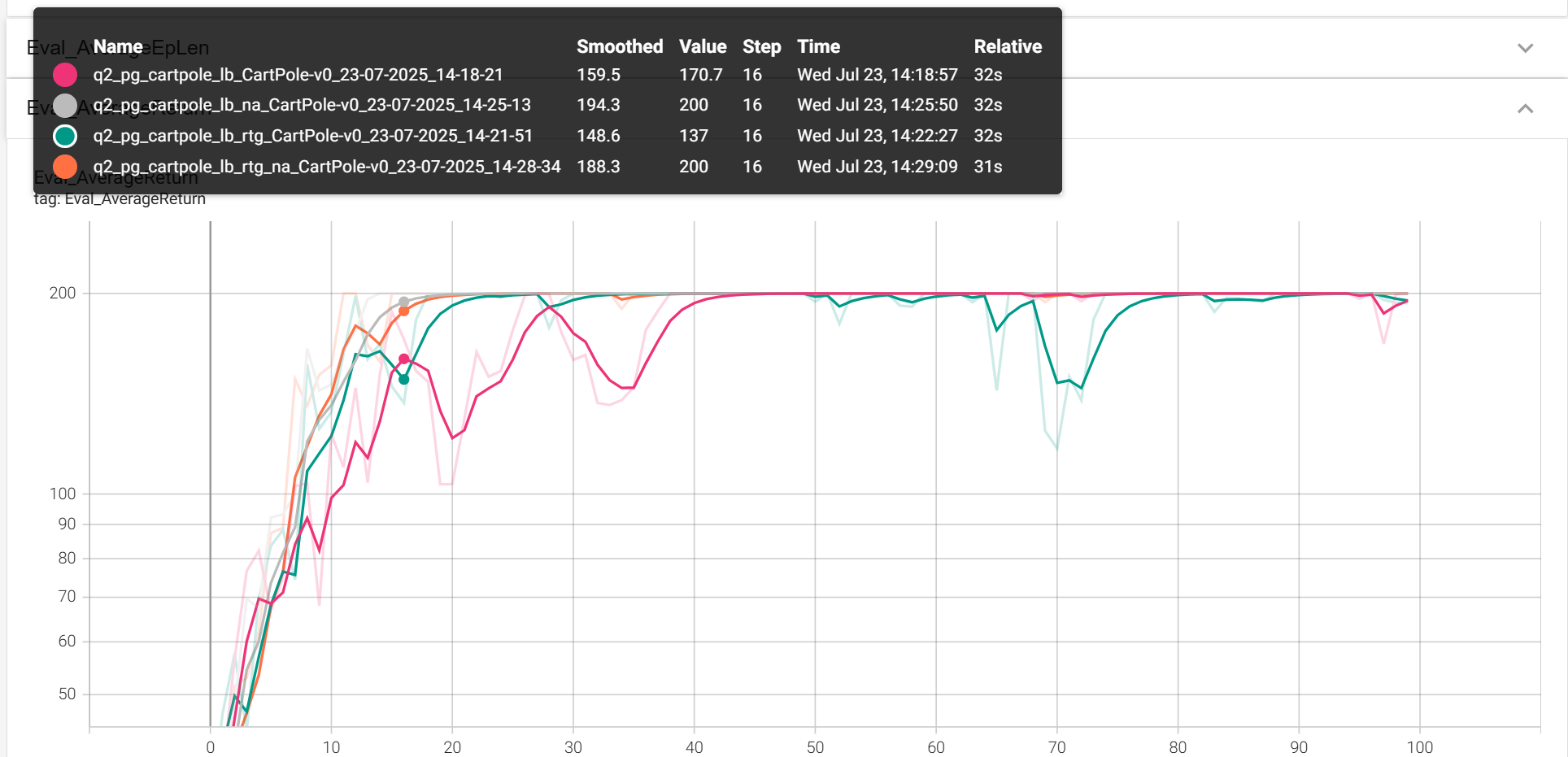
baseline
# No baseline
python cs285/scripts/run_hw2.py --env_name HalfCheetah-v4 \
-n 100 -b 5000 -rtg --discount 0.95 -lr 0.01 \
--exp_name cheetah
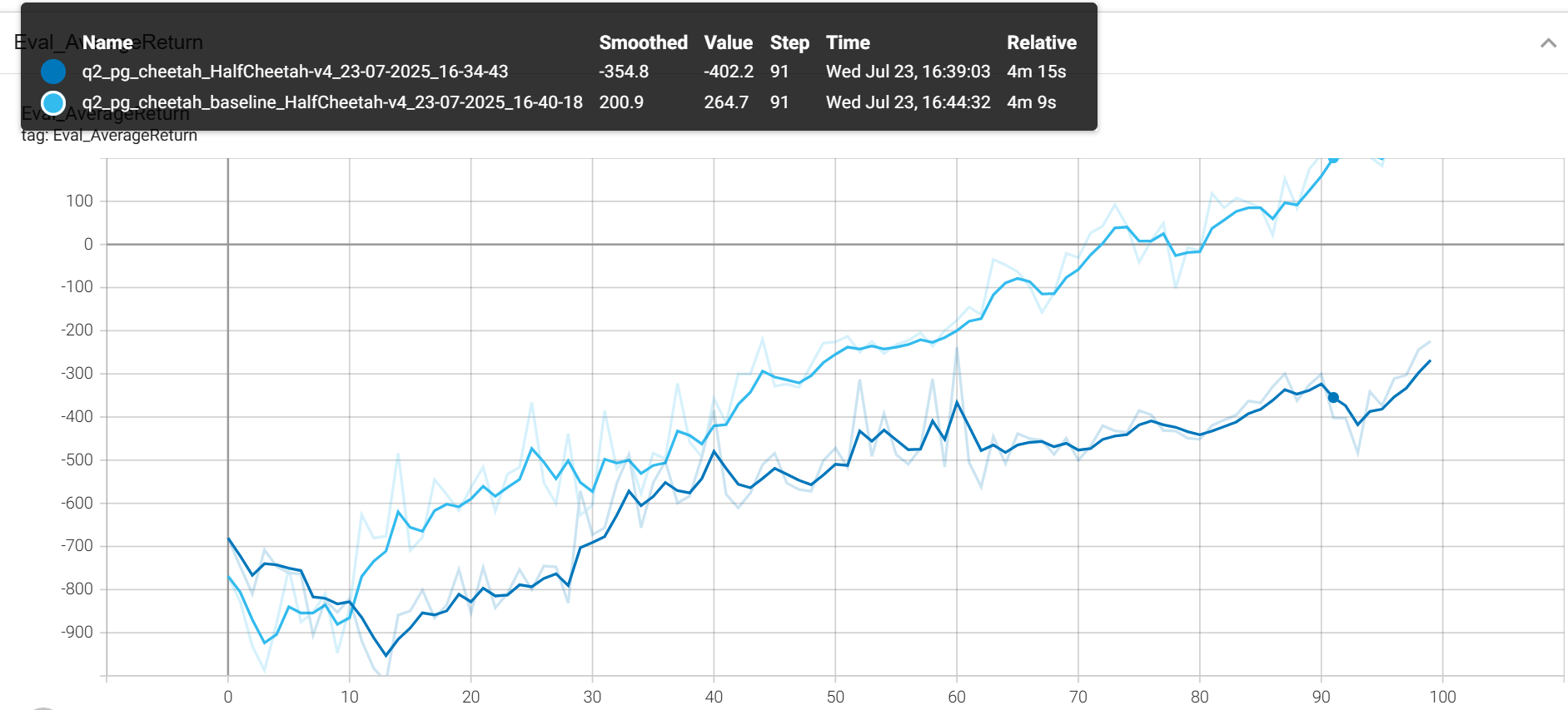
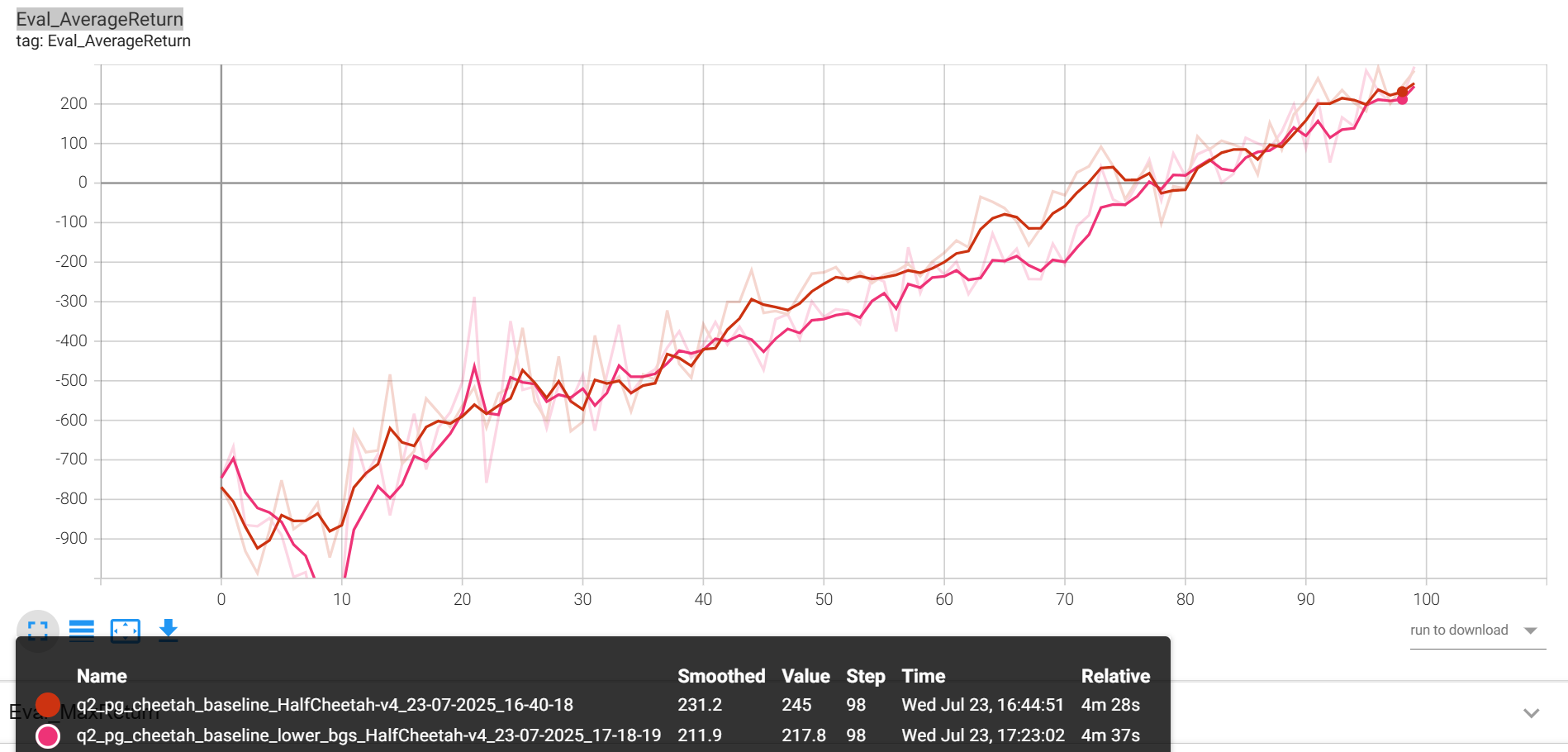
# Baseline
python cs285/scripts/run_hw2.py --env_name HalfCheetah-v4 \
-n 100 -b 5000 -rtg --discount 0.95 -lr 0.01 \
--use_baseline -blr 0.01 -bgs 5 --exp_name cheetah_baseline
文件存储位置

baseline loss
Eval_AverageReturn
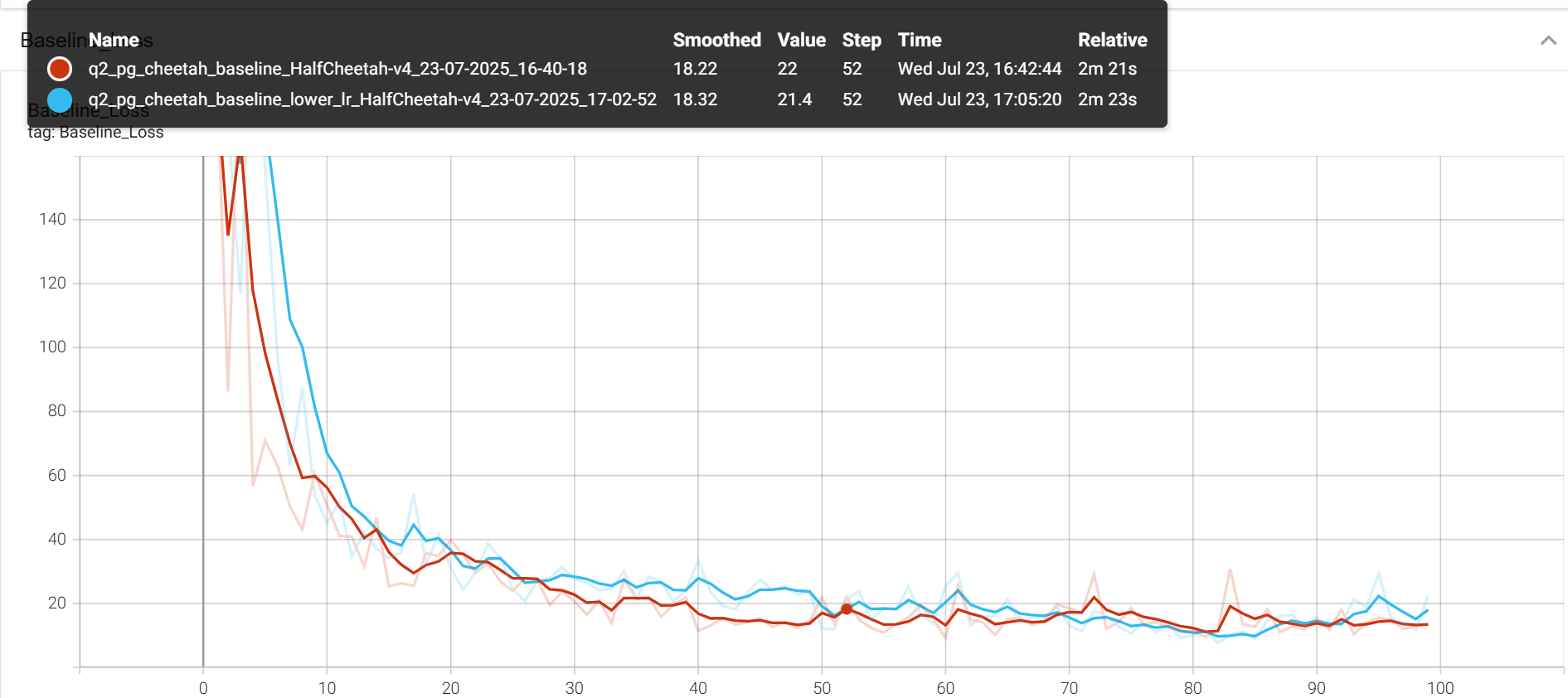
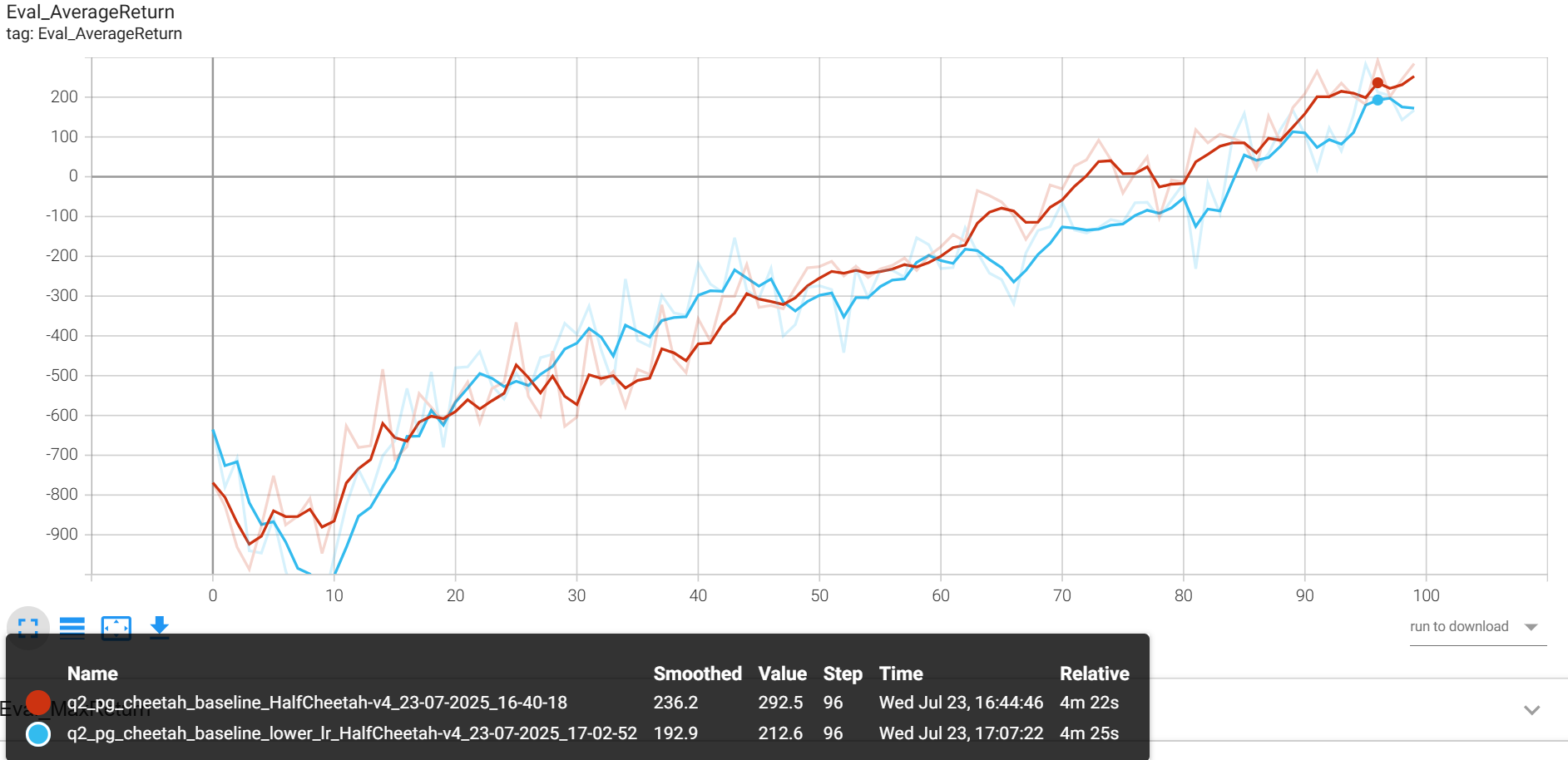
更小的blr
python cs285/scripts/run_hw2.py --env_name HalfCheetah-v4 \
-n 100 -b 5000 -rtg --discount 0.95 -lr 0.01 \
--use_baseline -blr 0.005 -bgs 5 --exp_name cheetah_baseline_lower_lr
baseline_loss:
Eval_AverageReturn:
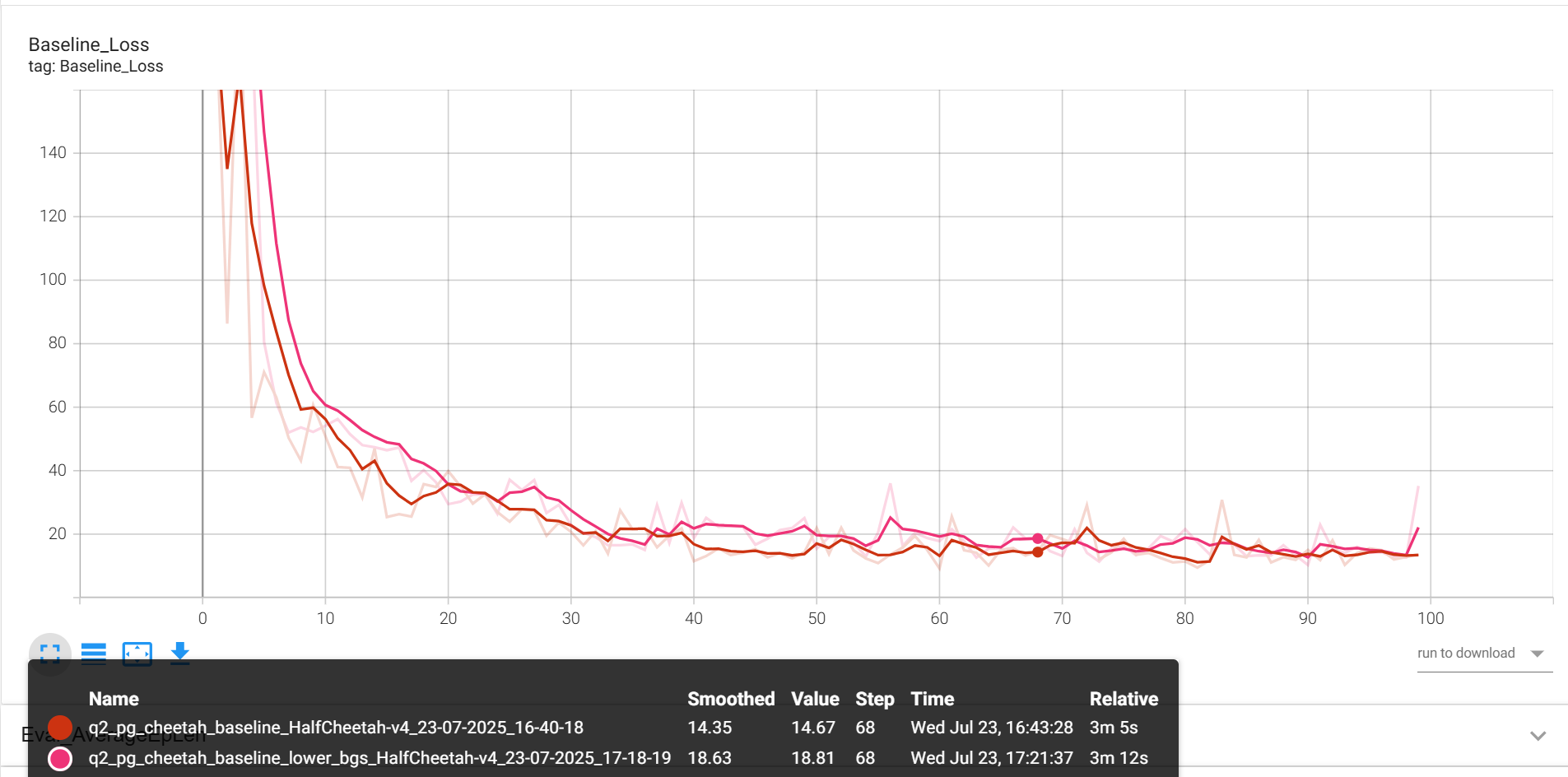
更小的bgs
python cs285/scripts/run_hw2.py --env_name HalfCheetah-v4 \
-n 100 -b 5000 -rtg --discount 0.95 -lr 0.01 \
--use_baseline -blr 0.01 -bgs 3 --exp_name cheetah_baseline_lower_lr
baseline_loss
Eval_AverageReturn
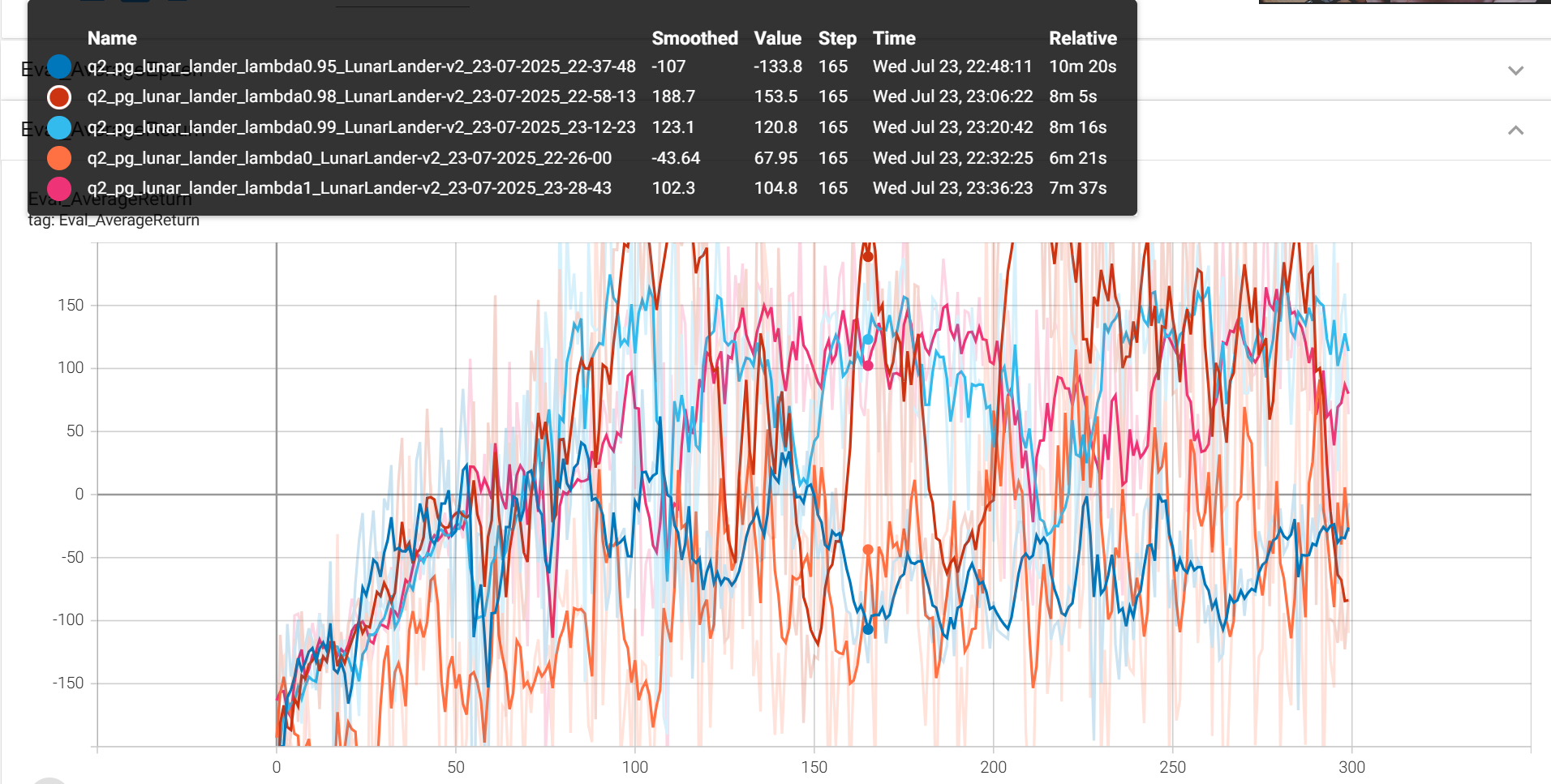
GAE的参数
python cs285/scripts/run_hw2.py \
--env_name LunarLander-v2 --ep_len 1000 \
--discount 0.99 -n 300 -l 3 -s 128 -b 2000 -lr 0.001 \
--use_reward_to_go --use_baseline --gae_lambda 0 \
--exp_name lunar_lander_lambda0
python cs285/scripts/run_hw2.py \
--env_name LunarLander-v2 --ep_len 1000 \
--discount 0.99 -n 300 -l 3 -s 128 -b 2000 -lr 0.001 \
--use_reward_to_go --use_baseline --gae_lambda 0.95 \
--exp_name lunar_lander_lambda0.95
python cs285/scripts/run_hw2.py \
--env_name LunarLander-v2 --ep_len 1000 \
--discount 0.99 -n 300 -l 3 -s 128 -b 2000 -lr 0.001 \
--use_reward_to_go --use_baseline --gae_lambda 0.98 \
--exp_name lunar_lander_lambda0.98
python cs285/scripts/run_hw2.py \
--env_name LunarLander-v2 --ep_len 1000 \
--discount 0.99 -n 300 -l 3 -s 128 -b 2000 -lr 0.001 \
--use_reward_to_go --use_baseline --gae_lambda 0.99 \
--exp_name lunar_lander_lambda0.99
python cs285/scripts/run_hw2.py \
--env_name LunarLander-v2 --ep_len 1000 \
--discount 0.99 -n 300 -l 3 -s 128 -b 2000 -lr 0.001 \
--use_reward_to_go --use_baseline --gae_lambda 1 \
--exp_name lunar_lander_lambda1
humanoid
显卡配置是A6000,在安装完以下渲染的系统依赖库(mesa依赖)
sudo apt update
sudo apt install libosmesa6-dev libgl1-mesa-glx libglfw3
仍然无法显示,尝试了使用虚拟显示,代码能正常运行,但结束后渲染出来的image为黑屏
Xvfb :99 -screen 0 1024x768x24 &
export DISPLAY=:99
注意在使用虚拟显示结束后关闭其进程pkill -f "Xvfb :99"
后尝试关闭虚拟现实,根据installation.md里面的操作export MUJOCO_GL=egl,仍然报错
ImportError: Cannot initialize a EGL device display. This likely means that your EGL driver does not support the PLATFORM_DEVICE extension, which is required for creating a headless rendering context.
–use_reward_to_go --use_baseline --gae_lambda 1
–exp_name lunar_lander_lambda1
[外链图片转存中...(img-8TlHf299-1753346249788)]
### humanoid
显卡配置是A6000,在安装完以下渲染的系统依赖库(mesa依赖)
```python
sudo apt update
sudo apt install libosmesa6-dev libgl1-mesa-glx libglfw3
仍然无法显示,尝试了使用虚拟显示,代码能正常运行,但结束后渲染出来的image为黑屏
Xvfb :99 -screen 0 1024x768x24 &
export DISPLAY=:99
注意在使用虚拟显示结束后关闭其进程pkill -f "Xvfb :99"
后尝试关闭虚拟现实,根据installation.md里面的操作export MUJOCO_GL=egl,仍然报错
ImportError: Cannot initialize a EGL device display. This likely means that your EGL driver does not support the PLATFORM_DEVICE extension, which is required for creating a headless rendering context.
后在run_hw2.py的前面加入os.environ["MUJOCO_GL"] = "osmesa"得以正常渲染


















 1844
1844

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









