




既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上大数据知识点,真正体系化!
由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、讲解视频,并且后续会持续更新
传感器数据包:sensor_msgs,找到消息类型:LaserScan
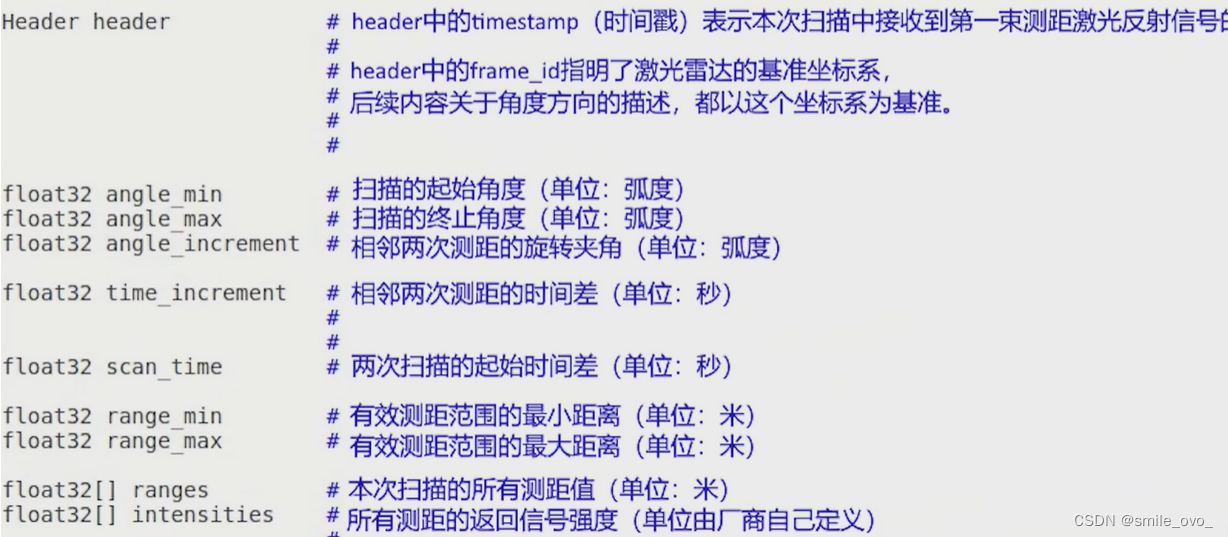
在运行仿真和可视化工具的前提下,显示scan话题里面的消息。
rostopic echo /scan --noarr #把数组折叠起来
既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上大数据知识点,真正体系化!
由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、讲解视频,并且后续会持续更新
传感器数据包:sensor_msgs,找到消息类型:LaserScan
在运行仿真和可视化工具的前提下,显示scan话题里面的消息。
rostopic echo /scan --noarr #把数组折叠起来
 3060
5443
9695
6941
693
3060
5443
9695
6941
693

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























