









1.源码及框架分析
SGI-STL30版本源代码,map和set的源代码在map/set/stl_map.h/stl_set.h/stl_tree.h等⼏个头⽂件 中。
map和set的实现结构框架核⼼部分截取出来如下:
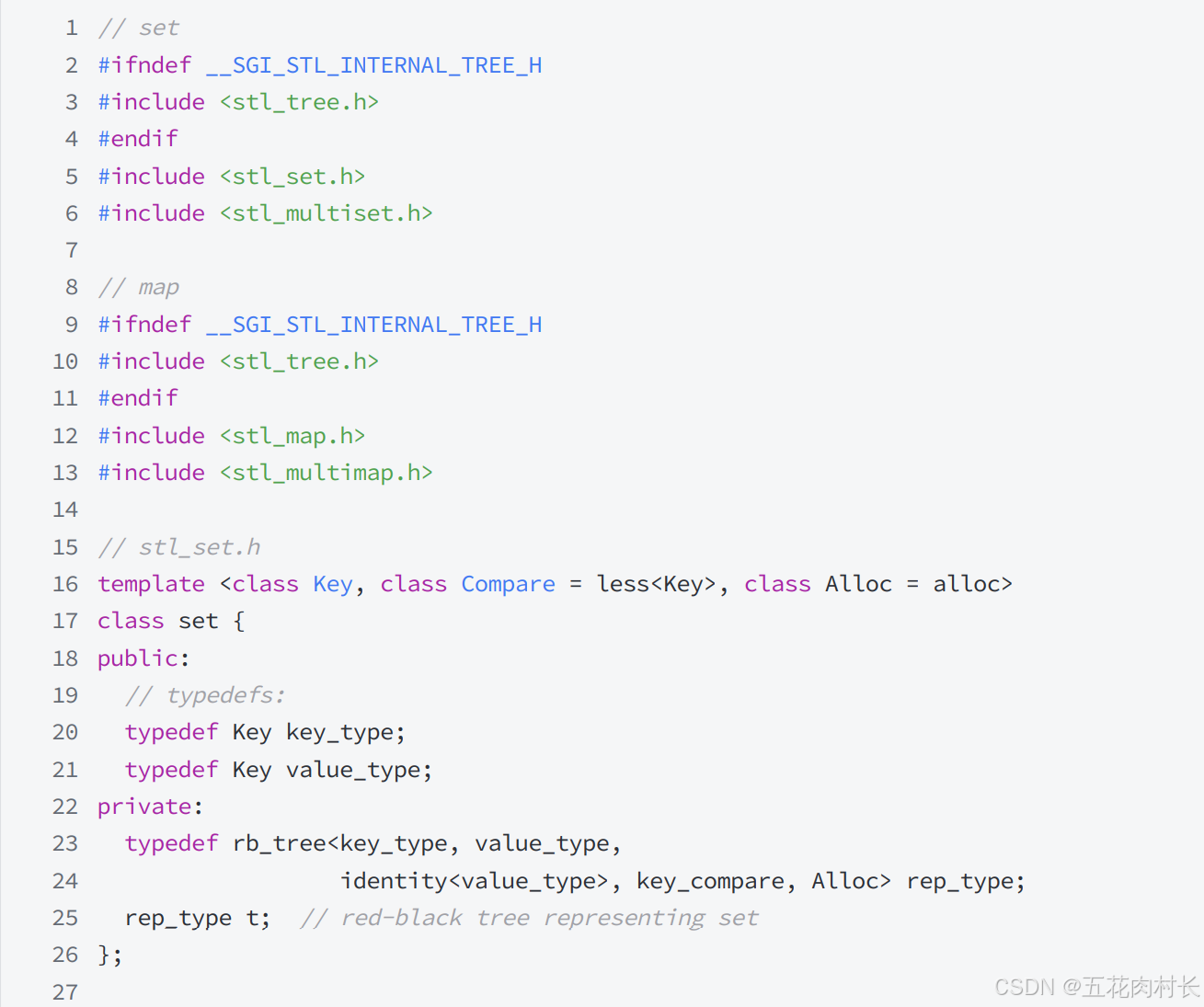
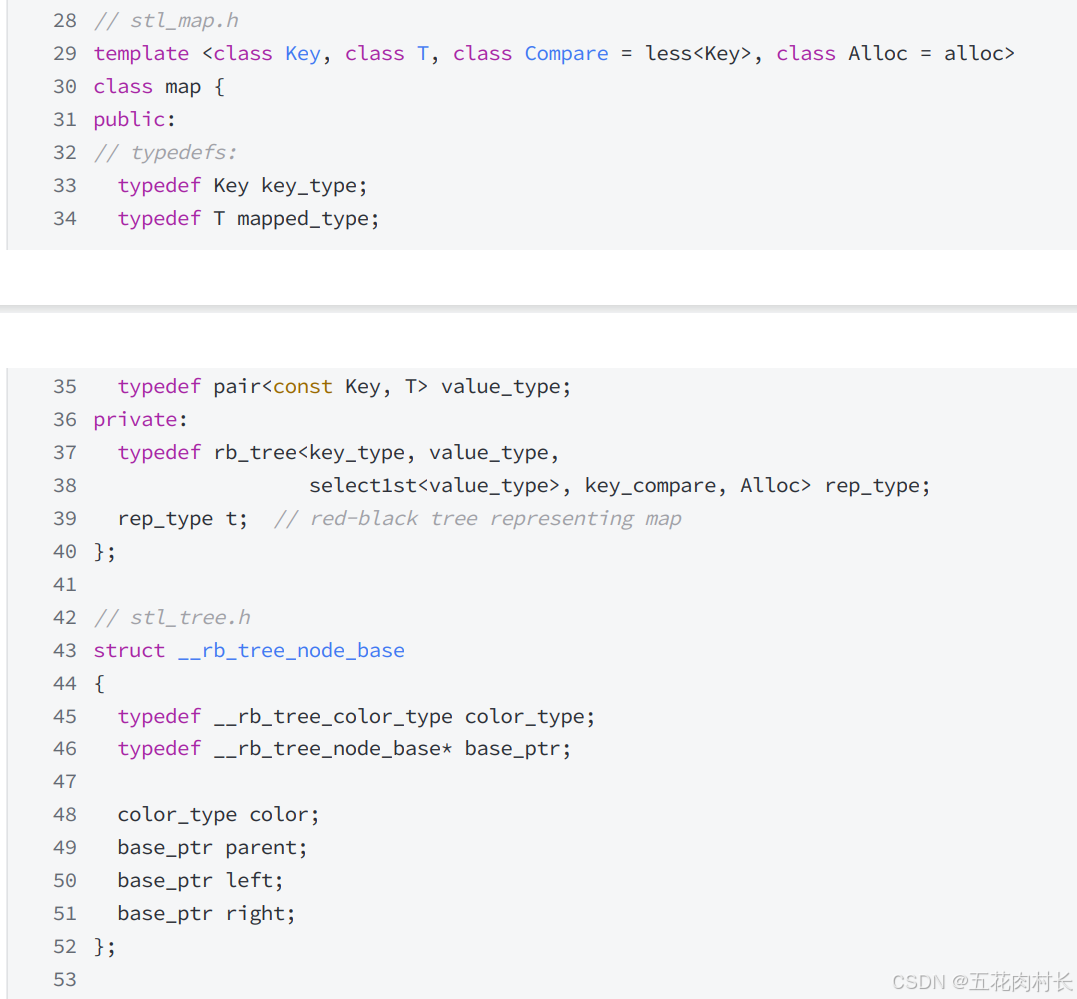

• 通过下图对框架的分析,我们可以看到源码中rb_tree⽤了⼀个巧妙的泛型思想实现,rb_tree是实 现key的搜索场景,还是key/value的搜索场景不是直接写死的,⽽是由第⼆个模板参数Value决定 _rb_tree_node中存储的数据类型。
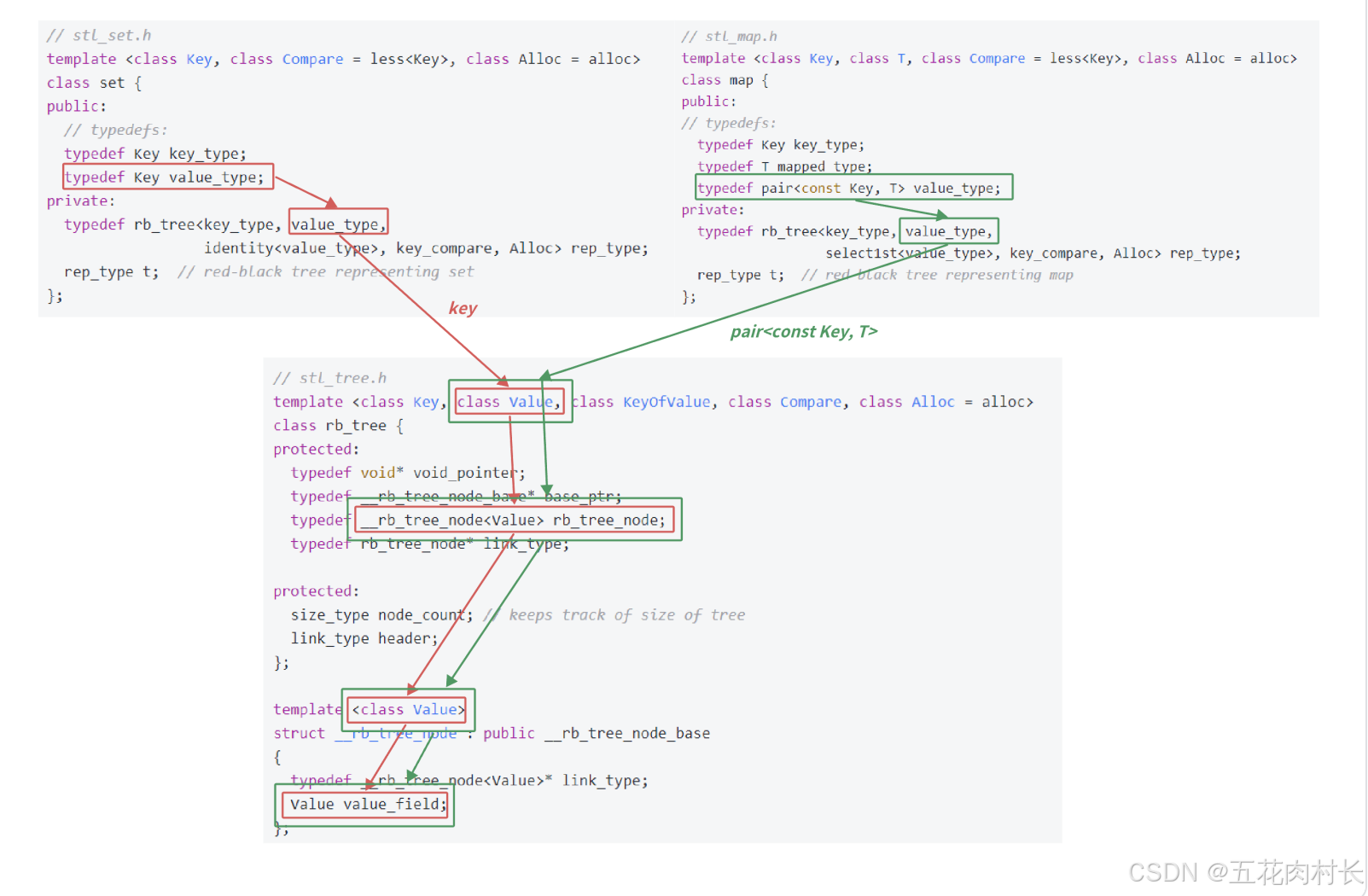
• set实例化rb_tree时第⼆个模板参数给的是key,map实例化rb_tree时第⼆个模板参数给的是 pair,这样⼀颗红⿊树既可以实现key搜索场景的set,也可以实现key/value搜索场 景的map。
• 要注意⼀下,源码⾥⾯模板参数是⽤T代表value,⽽内部写的value_type不是我们我们⽇常 key/value场景中说的value,源码中的value_type反⽽是红⿊树结点中存储的真实的数据的类型。
• rb_tree第⼆个模板参数Value已经控制了红⿊树结点中存储的数据类型,为什么还要传第⼀个模板 参数Key呢?尤其是set,两个模板参数是⼀样的,这是很多同学这时的⼀个疑问。要注意的是对于 map和set,find/erase时的函数参数都是Key,所以第⼀个模板参数是传给find/erase等函数做形 参的类型的。对于set⽽⾔两个参数是⼀样的,但是对于map⽽⾔就完全不⼀样了,map insert的 是pair对象,但是find和ease的是Key对象。
• 吐槽⼀下,这⾥源码命名⻛格⽐较乱,set模板参数⽤的Key命名,map⽤的是Key和T命名,⽽ rb_tree⽤的⼜是Key和Value,可⻅⼤佬有时写代码也不规范,乱弹琴。
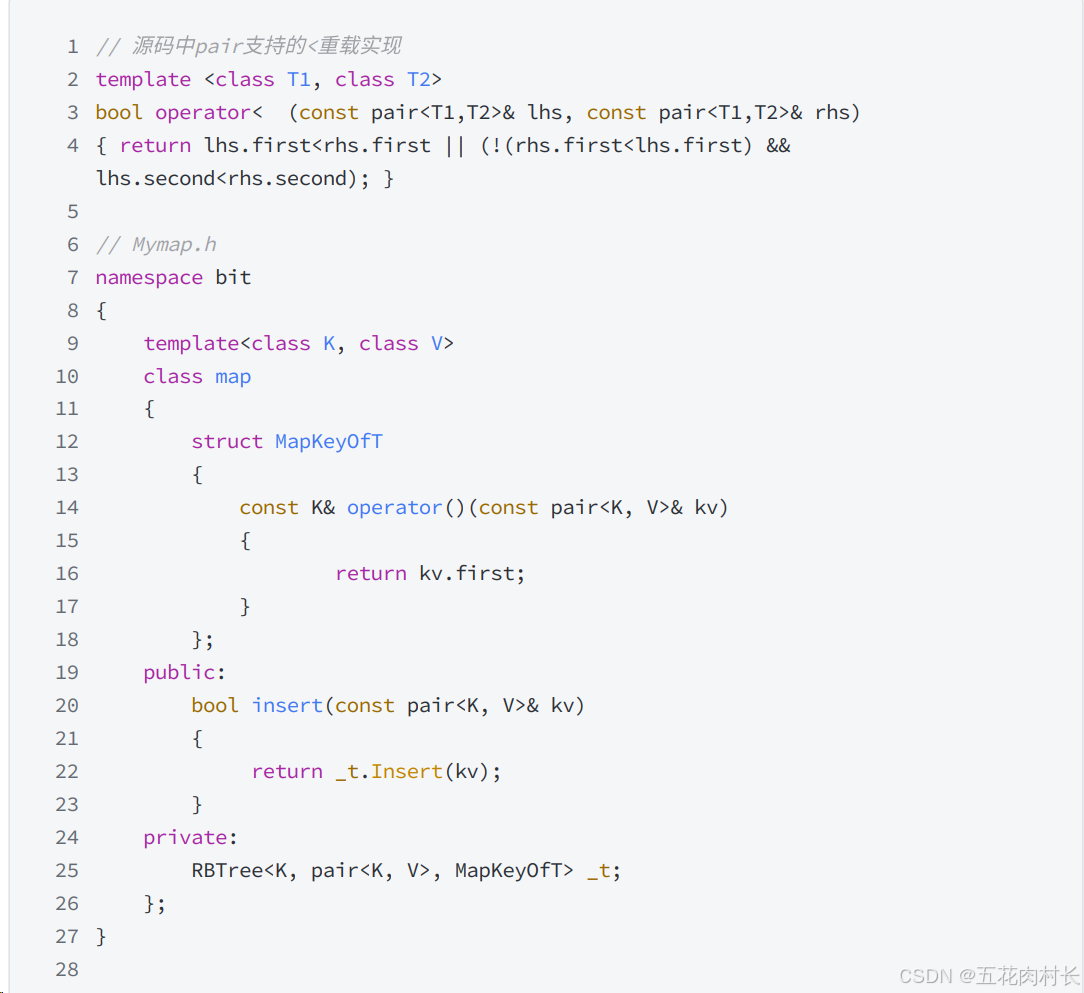
2.模拟实现set和map
2.1实现出复用红黑树的框架,并支持insert
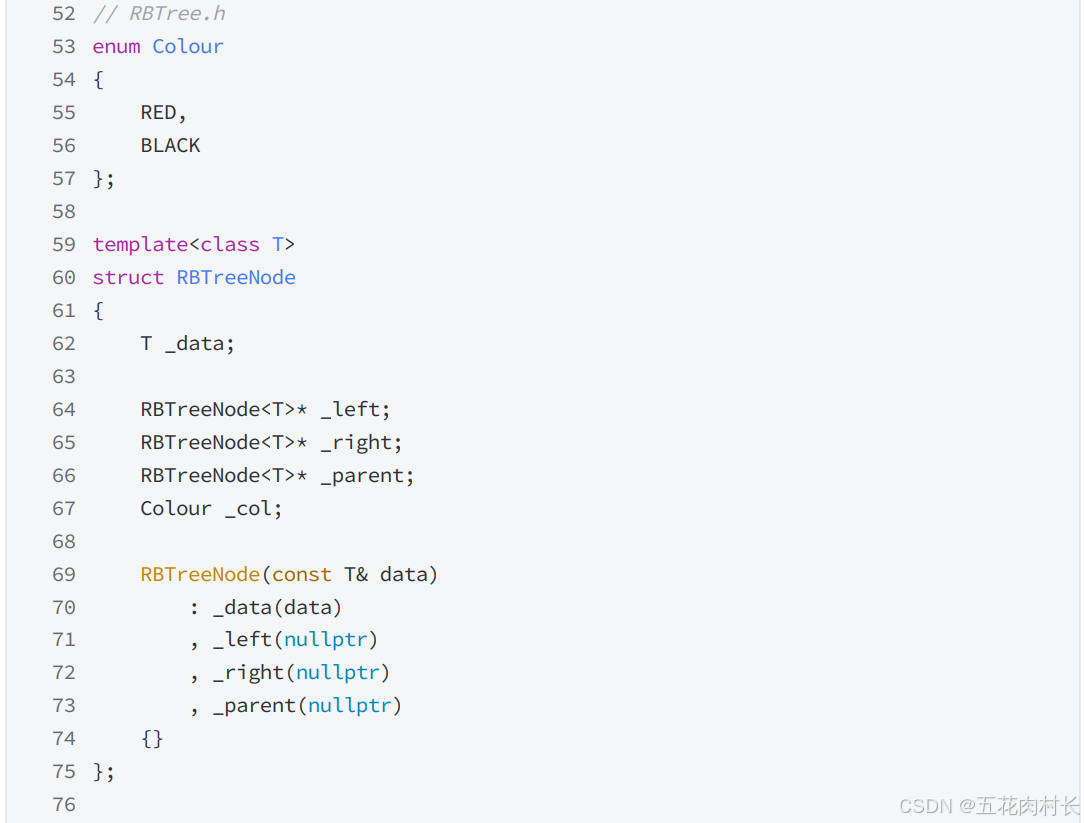
• 参考源码框架,map和set复⽤之前我们实现的红⿊树。
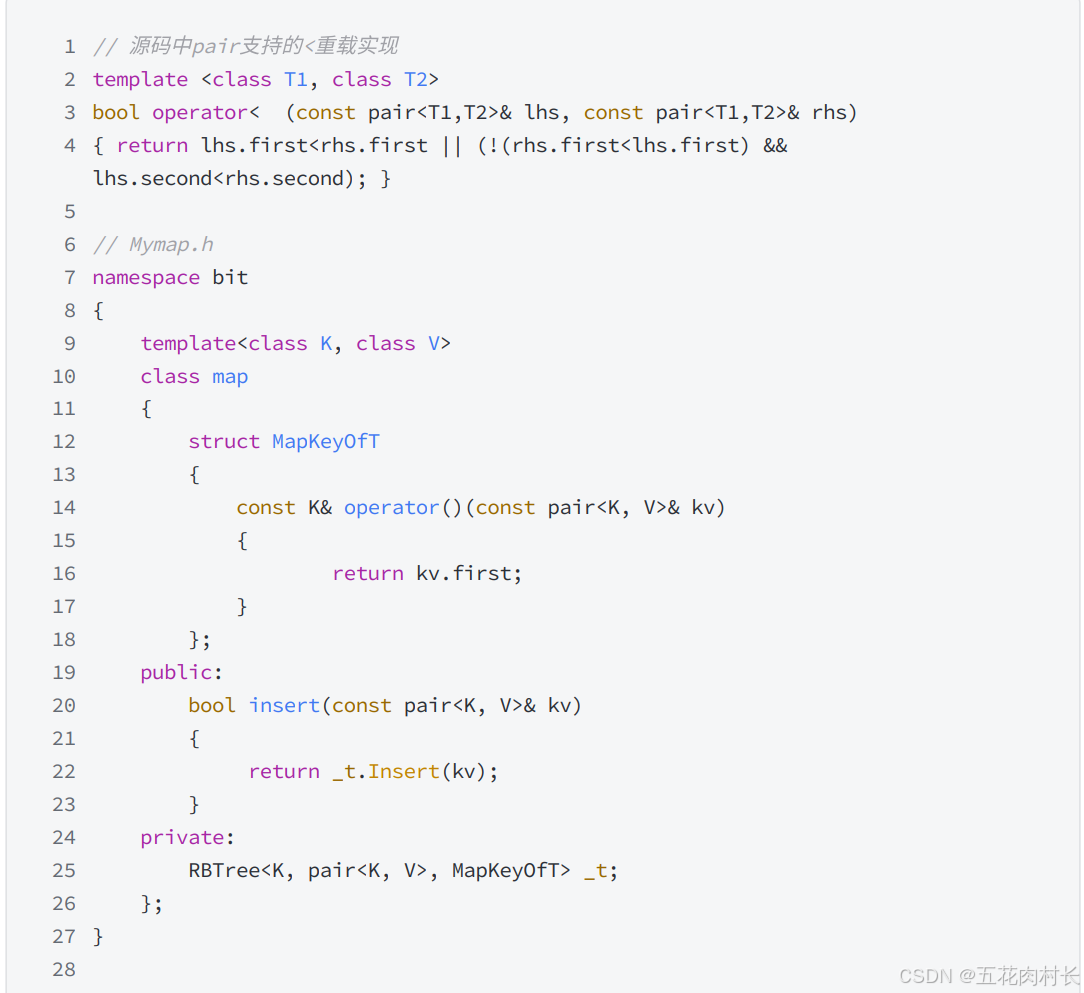
• 我们这⾥相⽐源码调整⼀下,key参数就⽤K,value参数就⽤V,红⿊树中的数据类型,我们使⽤ T。
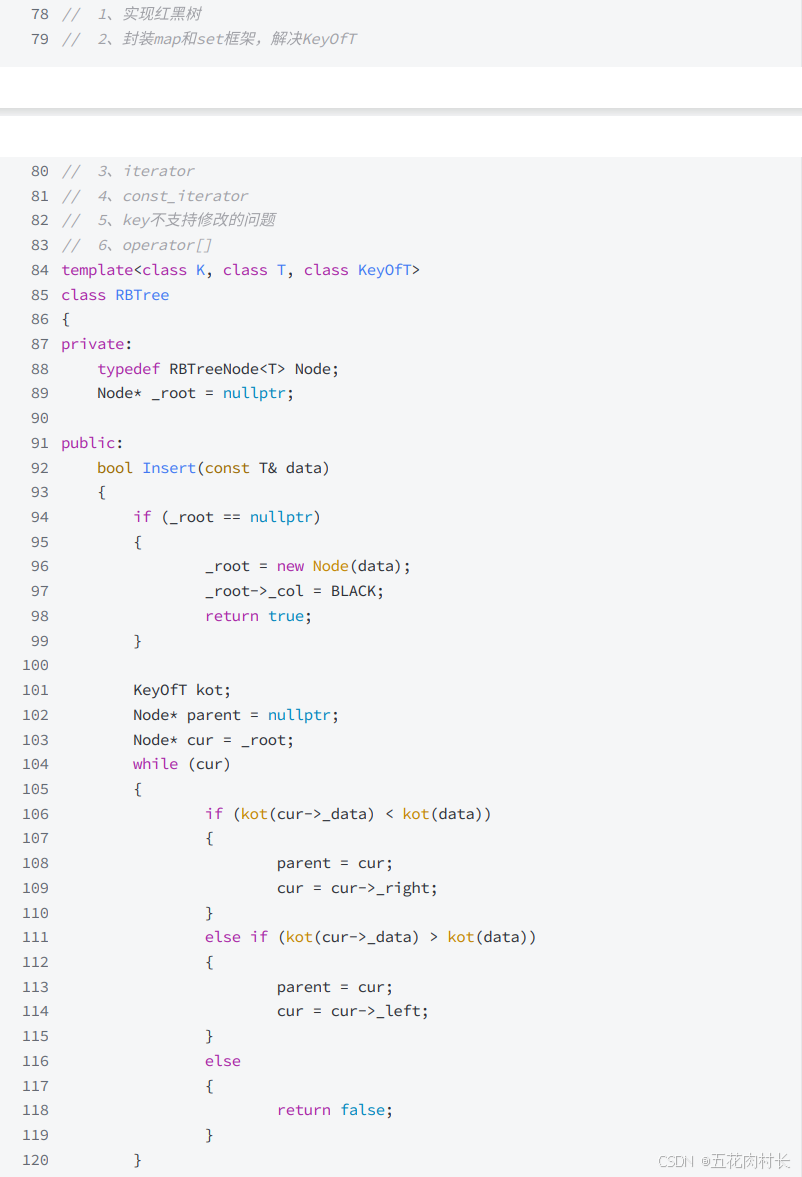
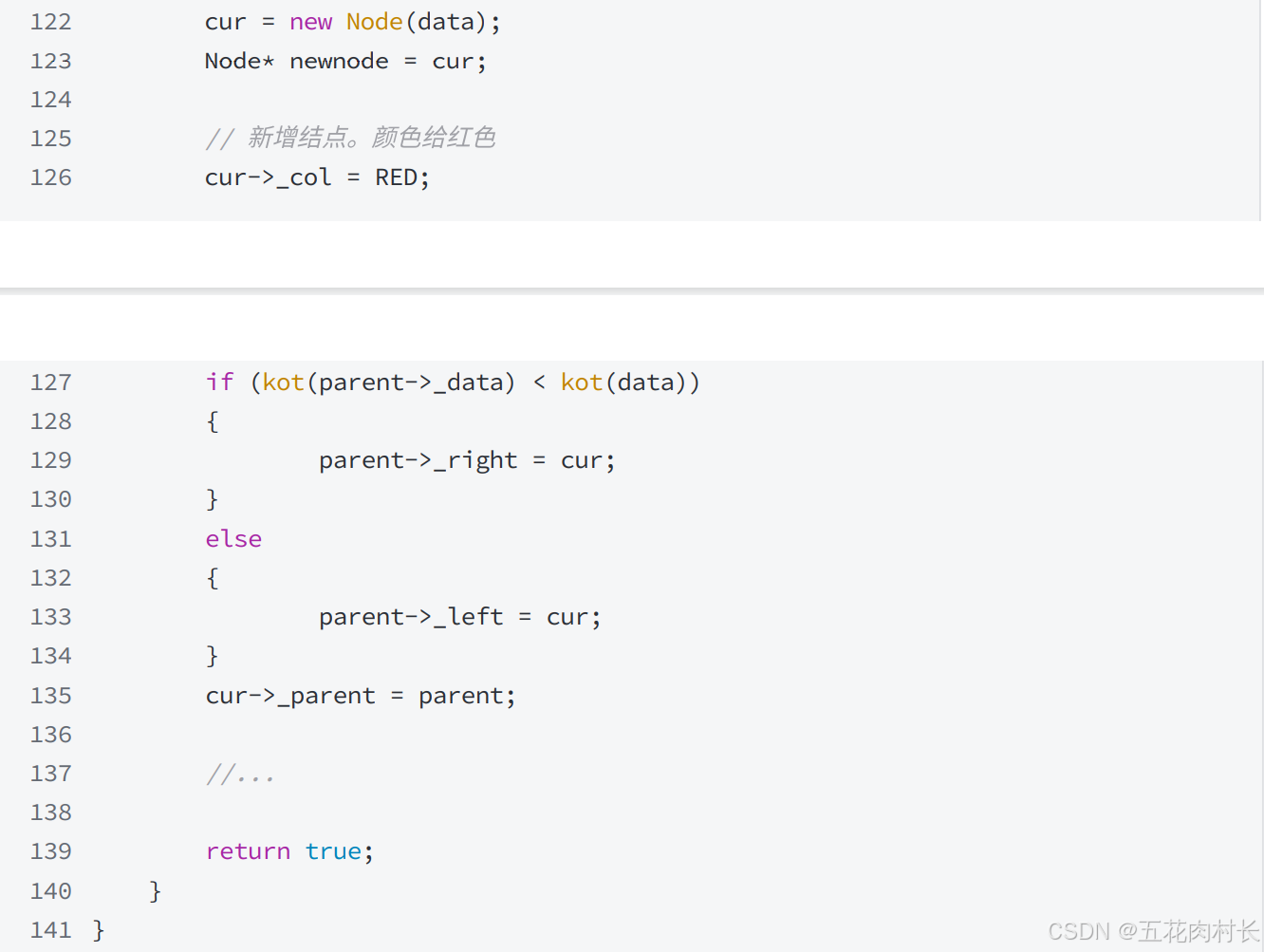
• 其次因为RBTree实现了泛型不知道T参数到底是K,还是pair,那么insert内部进⾏插⼊逻辑 ⽐较时,就没办法进⾏⽐较,因为pair的默认⽀持的是key和value⼀起参与⽐较,我们需要时的任 何时候只⽐较key,所以我们在map和set层分别实现⼀个MapKeyOfT和SetKeyOfT的仿函数传给 RBTree的KeyOfT,然后RBTree中通过KeyOfT仿函数取出T类型对象中的key,再进⾏⽐较,具体 细节参考如下代码实现。
2.2支持iterator的实现
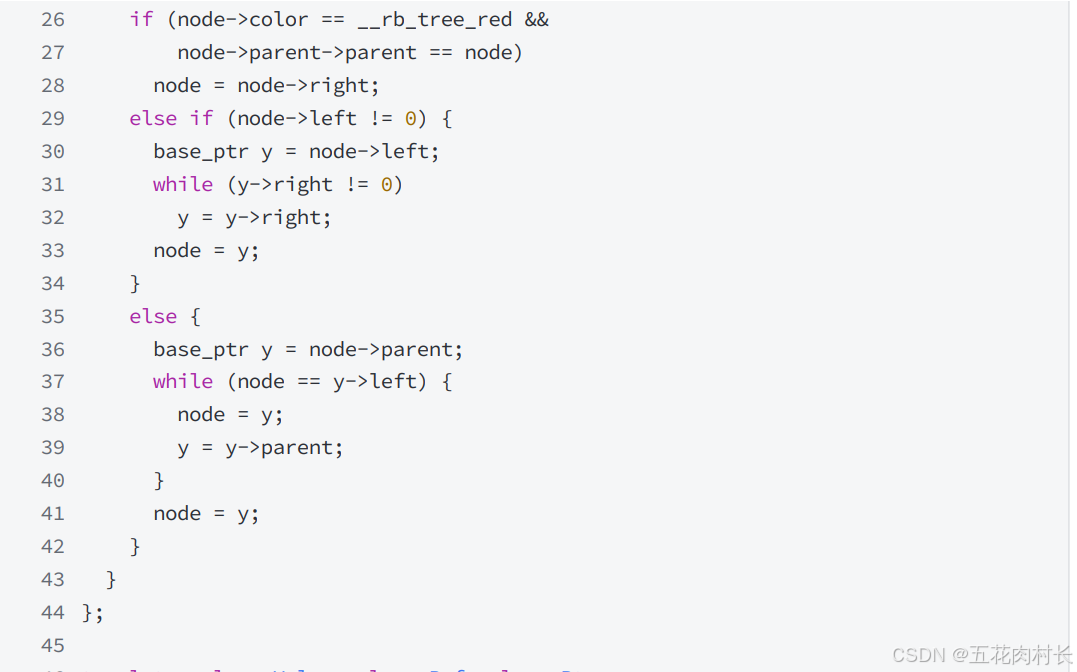
iterator核⼼源代码
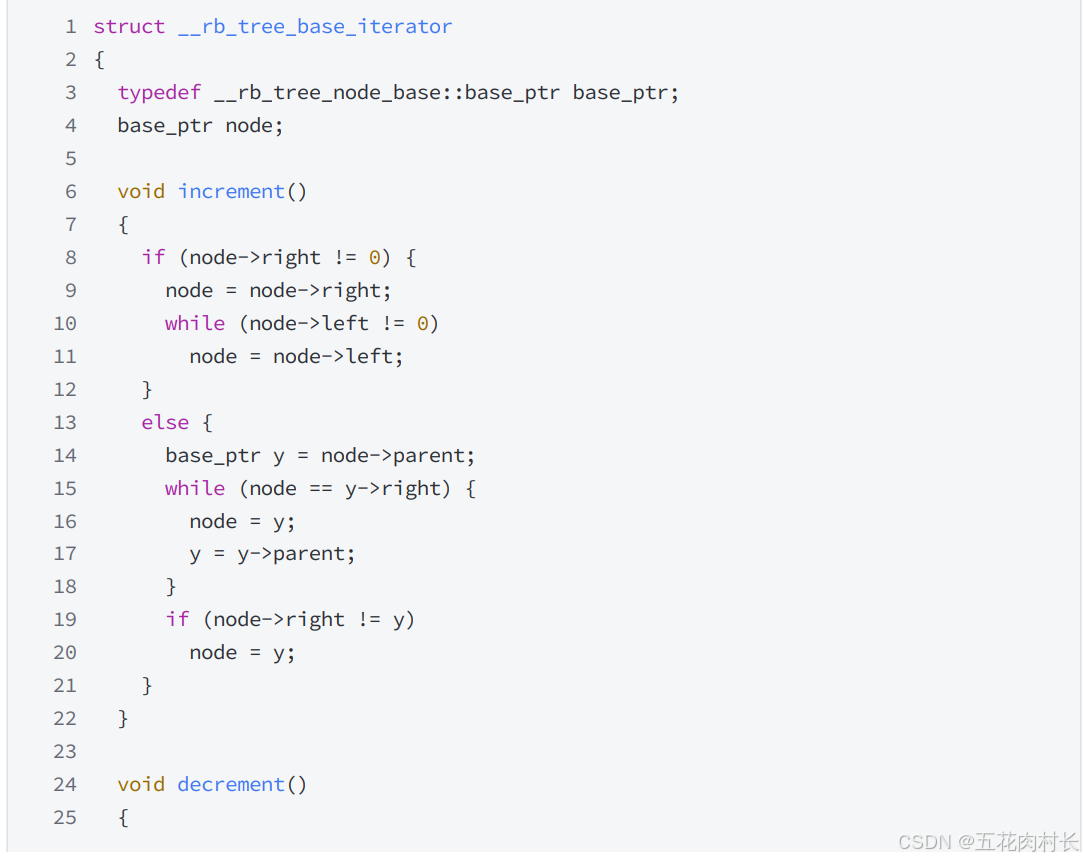
iterator实现思路分析
• iterator实现的⼤框架跟list的iterator思路是⼀致的,⽤⼀个类型封装结点的指针,再通过重载运算 符实现,迭代器像指针⼀样访问的⾏为。
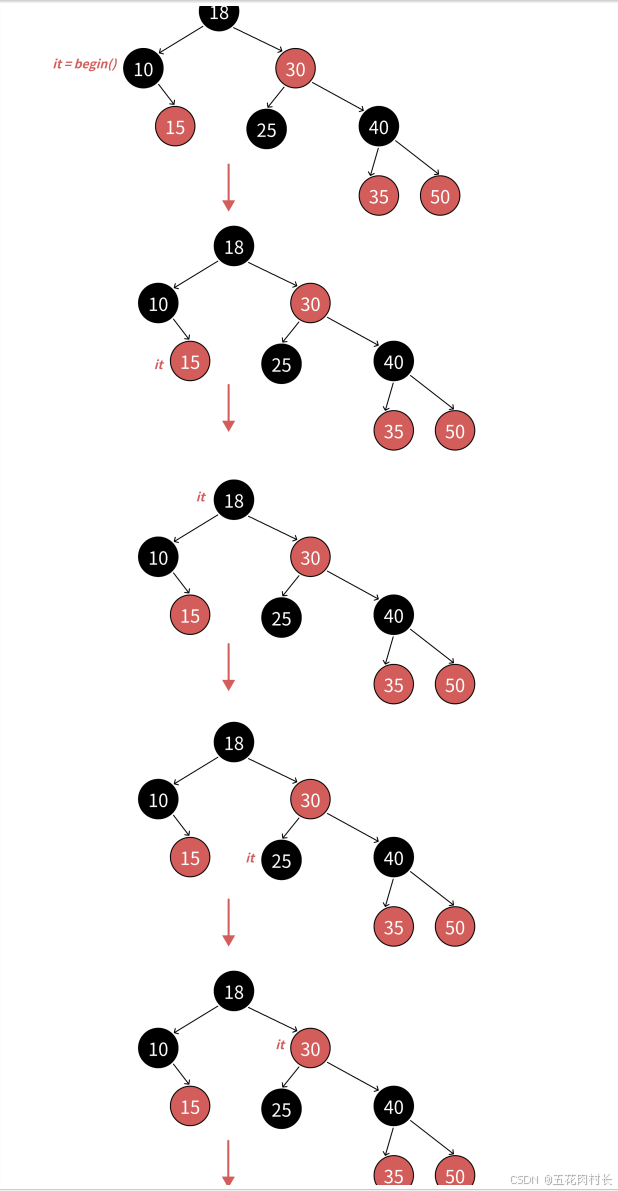
• 这⾥的难点是operator++和operator--的实现。之前使⽤部分,我们分析了,map和set的迭代器⾛ 的是中序遍历,左⼦树->根结点->右⼦树,那么begin()会返回中序第⼀个结点的iterator也就是10 所在结点的迭代器。
• 迭代器++的核⼼逻辑就是不看全局,只看局部,只考虑当前中序局部要访问的下⼀个结点。
• 迭代器++时,如果it指向的结点的右⼦树不为空,代表当前结点已经访问完了,要访问下⼀个结点 是右⼦树的中序第⼀个,⼀棵树中序第⼀个是最左结点,所以直接找右⼦树的最左结点即可。
• 迭代器++时,如果it指向的结点的右⼦树空,代表当前结点已经访问完了且当前结点所在的⼦树也 访问完了,要访问的下⼀个结点在当前结点的祖先⾥⾯,所以要沿着当前结点到根的祖先路径向上 找。
• 如果当前结点是⽗亲的左,根据中序左⼦树->根结点->右⼦树,那么下⼀个访问的结点就是当前结 点的⽗亲;如下图:it指向25,25右为空,25是30的左,所以下⼀个访问的结点就是30。
• 如果当前结点是⽗亲的右,根据中序左⼦树->根结点->右⼦树,当前当前结点所在的⼦树访问完 了,当前结点所在⽗亲的⼦树也访问完了,那么下⼀个访问的需要继续往根的祖先中去找,直到找 到孩⼦是⽗亲左的那个祖先就是中序要问题的下⼀个结点。如下图:it指向15,15右为空,15是10 的右,15所在⼦树话访问完了,10所在⼦树也访问完了,继续往上找,10是18的左,那么下⼀个 访问的结点就是18。
• end()如何表⽰呢?如下图:当it指向50时,++it时,50是40的右,40是30的右,30是18的右,18 到根没有⽗亲,没有找到孩⼦是⽗亲左的那个祖先,这是⽗亲为空了,那我们就把it中的结点指针 置为nullptr,我们⽤nullptr去充当end。需要注意的是stl源码空,红⿊树增加了⼀个哨兵位头结点 做为end(),这哨兵位头结点和根互为⽗亲,左指向最左结点,右指向最右结点。相⽐我们⽤ nullptr作为end(),差别不⼤,他能实现的,我们也能实现。只是--end()判断到结点时空,特殊处 理⼀下,让迭代器结点指向最右结点。具体参考迭代器--实现。
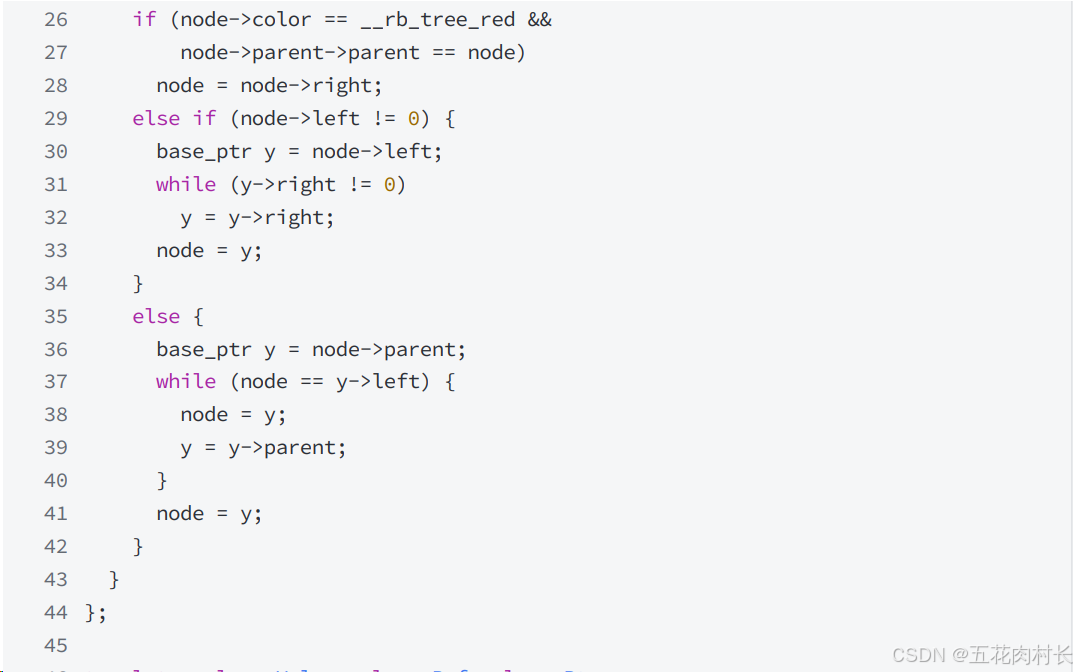
• 迭代器--的实现跟++的思路完全类似,逻辑正好反过来即可,因为他访问顺序是右⼦树->根结点-> 左⼦树,具体参考下⾯代码实现。
• 迭代器--的实现跟++的思路完全类似,逻辑正好反过来即可,因为他访问顺序是右⼦树->根结点-> 左⼦树,具体参考下⾯代码实现。
• set的iterator也不⽀持修改,我们把set的第⼆个模板参数改成const K即可, RBTreeconst K,const K, SetKeyOfT> _t;
• map的iterator不⽀持修改key但是可以修改value,我们把map的第⼆个模板参数pair的第⼀个参 数改成const K即可, RBTree<K,pair<const K,V>, MapKeyOfT> _t;
• ⽀持完整的迭代器还有很多细节需要修改,具体参考下⾯题的代码。

2.3map支持[]
• map要⽀持[]主要需要修改insert返回值⽀持,修改RBtree中的insert返回值为 pair<Iterator,bool> Insert(const T& data)
• 有了insert⽀持[]实现就很简单了,具体参考下⾯代码实现

















 1079
1079

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









