 ROS状态机在机器人竞赛中的应用
ROS状态机在机器人竞赛中的应用




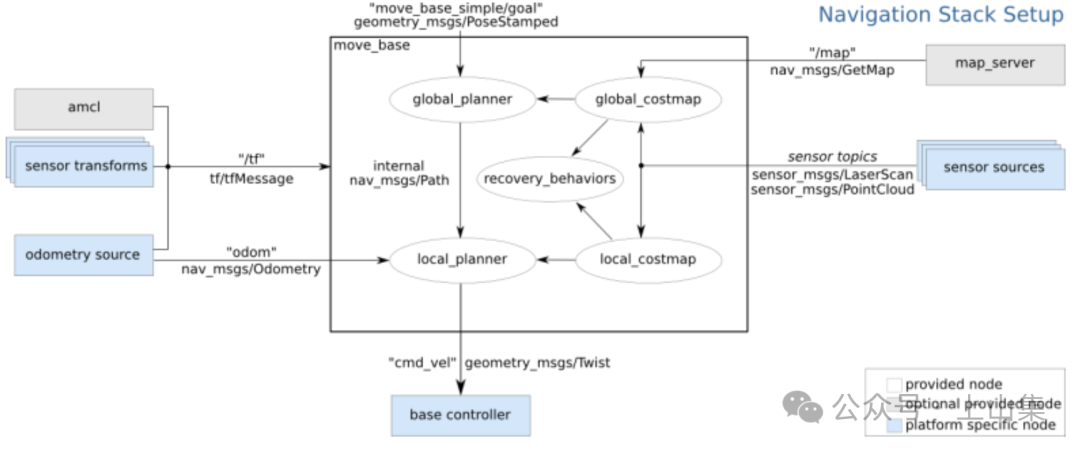
ROS(Robot operating system) 是机器人的操作系统(Android、IOS),其中各节点主要通过话题、服务等机制进行实时消息的传输与通信,其核心要义可用下图较好的概括。
ROS实时通信的基础为话题通信(和其他),其运作机理为基于传感器信息的实时传输,以固定帧率执行回调函数(每次接受传感器数据就执行)。实时数据是天然的自变量,其基于时间的变化刚好可以作为状态机状态切换的标志,今天分享一下作为一个ROS初学者,在机器人竞赛中的状态机代码
一、ROS 实时通信的原理
ROS 的通信模型以节点(Node)为基本单元,节点之间通过话题(Topic)、服务(Service)与动作(Action)等机制交换信息。
-
话题(Topic):用于连续数据流的发布与订阅,例如图像、激光雷达数据。
-
服务(Service):适合请求-响应类型的通信,例如参数查询或单次任务触发。
-
动作(Action):适用于需要持续反馈的任务控制,如导航或机械臂动作。
在该项目中,主节点负责状态机逻辑,而感知与控制模块各自以独立线程实时订阅话题,实现异步通信。例如:
rospy.Subscriber("/usb_cam_1/image",Image, update_camera_image)
rospy.Subscriber("/scan", LaserScan, update_lidar_data)
pub = rospy.Publisher('/ackermann_cmd', AckermannDriveStamped, queue_size=1)
📡 解读:
图像数据与激光雷达数据通过回调函数实时更新,而车辆的控制命令(速度、转角)则通过 AckermannDriveStamped 消息发布。
这种“非阻塞式”话题通信让机器人能够在毫秒级内响应环境变化,满足竞赛中对实时性的高要求。
二、状态机(State Machine)逻辑设计
状态机是整个系统的“决策大脑”,它根据感知模块传来的环境信息切换行为状态。
项目中共定义了六个状态:
IDLE = 'IDLE'
WAITING_FOR_GREEN_LIGHT = 'WAITING_FOR_GREEN_LIGHT'
LINE_FOLLOWING = 'LINE_FOLLOWING'
OBSTACLE_AVOIDANCE = 'OBSTACLE_AVOIDANCE'
STOPPED_AT_INTERSECTION = 'STOPPED_AT_INTERSECTION'
INTERSECTION_MANEUVER = 'INTERSECTION_MANEUVER'
核心逻辑如下:
-
等待绿灯 → 绿灯亮起或超时 → 进入巡线状态
-
巡线行驶 → 检测障碍物 → 进入避障状态
-
巡线行驶 → 检测停止线 → 进入路口停止
-
停止 → 等待计时结束 → 执行路口动作
-
完成转向 → 回到 巡线状态
简化版伪代码如下:
if state == WAITING_FOR_GREEN_LIGHT and light_is_green():
state = LINE_FOLLOWING
elif state == LINE_FOLLOWING and detect_obstacle():
state = OBSTACLE_AVOIDANCE
elif state == OBSTACLE_AVOIDANCE and avoidance_done():
state = LINE_FOLLOWING
elif state == STOPPED_AT_INTERSECTION and timeout():
state = INTERSECTION_MANEUVER
🧠 对比说明:
传统的“条件判断式控制”容易出现逻辑混乱,而使用状态机可以让每个行为逻辑独立清晰,便于调试和扩展。例如在后续加入“手动干预”或“交通标志识别”时,只需增加新的状态分支。
三、感知模块:实时输入的处理逻辑
感知模块(PerceptionModule)负责从相机与雷达中提取环境信息。核心任务包括:
-
红绿灯识别
-
车道线检测
-
停止线识别
-
障碍物检测
其中红绿灯检测核心函数如下:
deflight_detection(origin_img):
hsv = cv2.cvtColor(origin_img, cv2.COLOR_BGR2HSV)
red_mask = cv2.inRange(hsv, (0,127,127), (20,255,255))
green_mask = cv2.inRange(hsv, (35,50,50), (85,255,255))
count_red = cv2.countNonZero(red_mask)
count_green = cv2.countNonZero(green_mask)
return1if count_green > 15000else0
📸 原理解析:
通过 HSV 颜色空间提取特定颜色区域(红或绿),再统计像素数量判断灯色。
与深度学习识别不同,这种基于传统视觉算法的方案具有响应快、计算轻量的优势,更适合资源受限的嵌入式系统。
四、控制模块:从感知到运动
控制模块(ControlModule)将感知结果转化为车辆运动指令。其主要功能包括:
-
车道保持(Line Following)
-
避障(Obstacle Avoidance)
-
路口机动(Intersection Maneuver)
下面是巡线控制的核心逻辑:
lane_offset = top_centroid[0] - bottom_centroid[0]
center_offset = lane_center - self.image_center
angular_component = self.kp_angle * (-lane_offset/100.0)
lateral_component = self.kp_lateral * (-center_offset/100.0)
steering_angle = angular_component + 1.0
msg.drive.steering_angle = steering_angle
msg.drive.speed = linear_x
self.publisher.publish(msg)
🚗 原理解释:
通过图像识别到的车道中心点偏移计算舵机转角,并通过 PID 参数控制偏差修正。
与简单的“线性映射”不同,该系统将横向偏移与角度误差分离计算,使车辆在复杂曲线中行驶更平稳。
五、避障与状态切换机制
当雷达检测到前方障碍物时,系统进入避障状态。代码中通过时间控制确保动作执行完整:
if self.obstacle_avoidance_state == 'TURN_LEFT':
msg.drive.steering_angle = self.obstacle_avoidance_steer_left
if current_time - self.avoidance_start_time > 1.5:
self.obstacle_avoidance_state = 'MOVE_FORWARD'
🕹 机制解析:
相比依赖路径规划算法的避障方式,这种基于状态时间控制的方案简单且实时性强。虽然精度较低,但在竞赛场地(如固定路线)中更可靠,调试成本更低。

















 2321
2321

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









