







 本文介绍了嵌入式系统中PIT定时器的初始化、中断处理、中断优先级配置,以及与编码器接口的示例,包括计时器周期中断、计数器操作和编码器数据采集与清除。
本文介绍了嵌入式系统中PIT定时器的初始化、中断处理、中断优先级配置,以及与编码器接口的示例,包括计时器周期中断、计数器操作和编码器数据采集与清除。
pit(定时器中断)
PIT , 是programmable interval timer 可编程间隔定时器 DSC中的器件 的缩写,所以就是定时器中断,有点像32里的timer(TIMx)
目前看来一共能用通道的有四个
typedef enum // 枚举通道号
{
CCU60_CH0,
CCU60_CH1,
CCU61_CH0,
CCU61_CH1,
}pit_index_enum;
因为涉及到中断,为方便设定中断优先级,所以要像uart那节一样先记得
#include "isr_config.h" //一个设定优先级的头文件
/*********32里就可以直接通过cude来配置相关优先级了,一般保持默认也没事
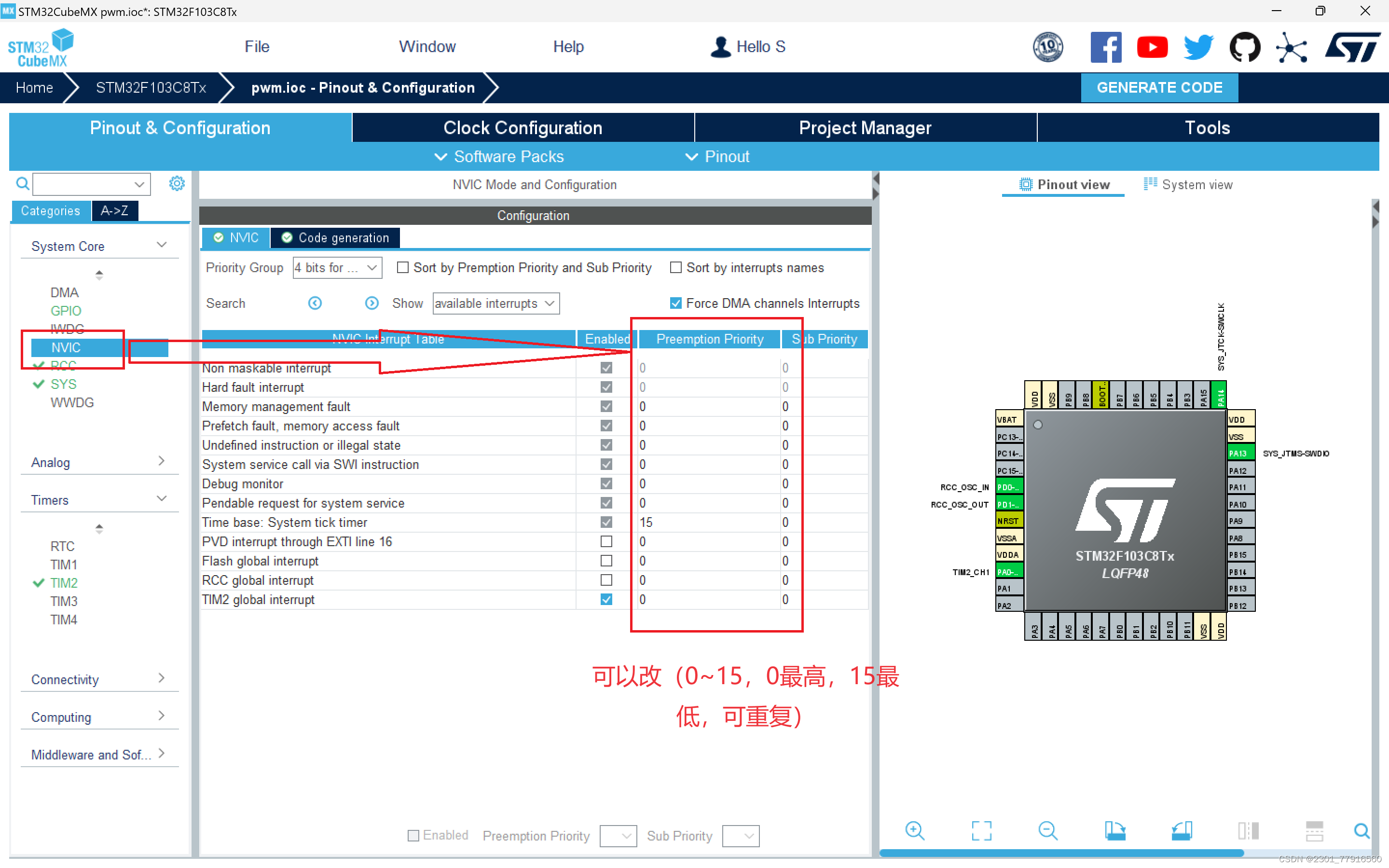
***********/
初始化函数
pit_ms_init(PIT_NUM, 500);
// 初始化 CCU6_0_CH0 (逐飞例程将PIT_NUM宏定义为CCU60_CH0)为周期中断 1000ms 周期
原型:#define pit_ms_init(pit_index, time) pit_init((pit_index), (time*1000)) // (单位为 毫秒)
//-------------------------------------------------------------------------------------------------------------------
// 函数简介 pit_ms初始化
// 参数说明 pit_index 选择CCU6模块
// 参数说明 time 周期时间(单位:毫秒)
// 返回参数 void
// 使用示例 pit_ms_init(CCU60_CH0, 5); // 设置周期中断5ms
//-------------------------------------------------------------------------------------------------------------------
类似的还有一个微秒的 pit_us_init(pit_index, time)
/*****这应该就相当于32里的(在MX中使能中断后的) HAL_TIM_Base_Start_IT(&htim2); ********/
中断回调函数(其实是个多层宏定义嵌套拓展怪,不断open declaration 后的东西超出了我的c语言理解范围,姑且就理解为函数吧)
//三个参数里的第一个在ADS里字体会被自动加粗,因为它其实是一个自定义函数名
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1895
1895

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









