






问题:
SA算法:
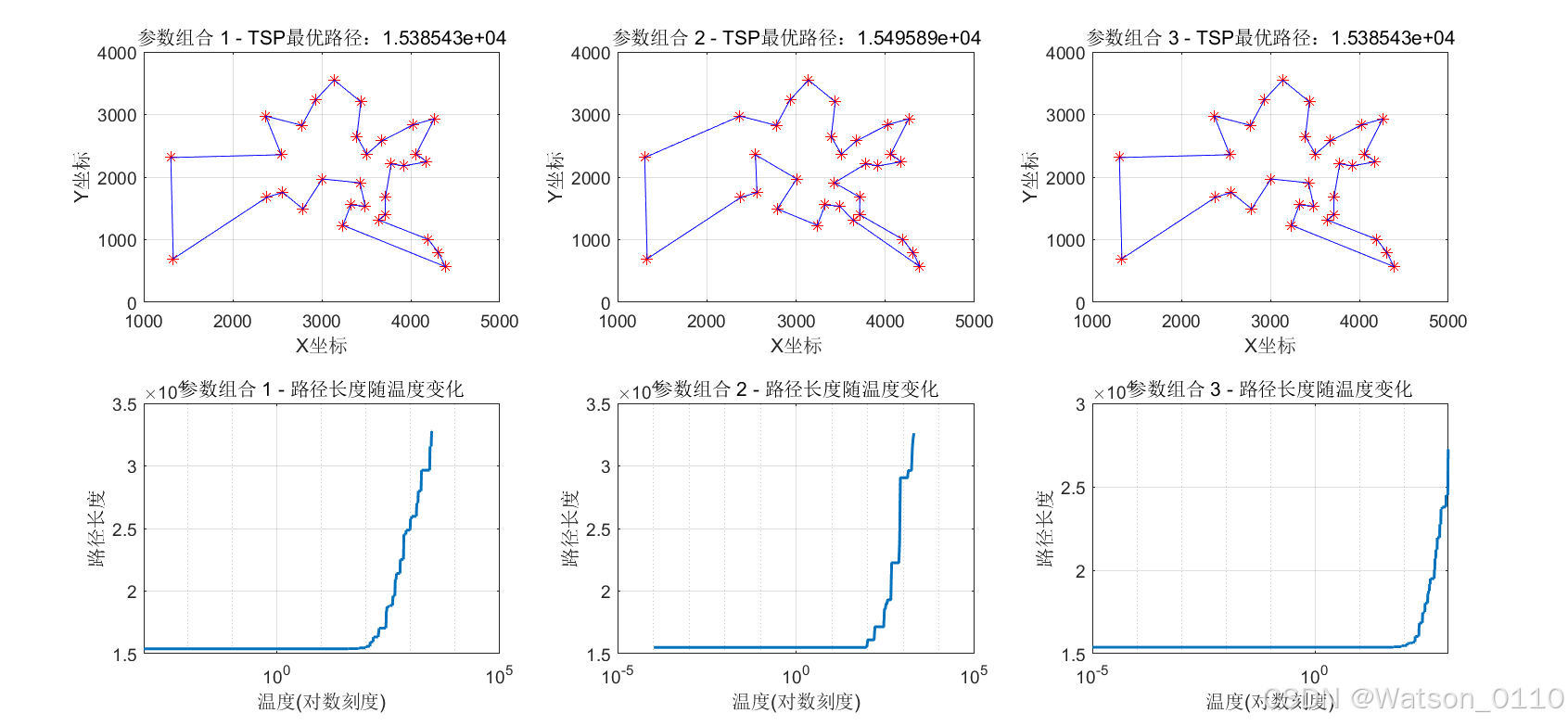
% 定义可调参数的组合 初始温度,终止温度,迭代次数,温度衰减率 param_combinations = [ 3000, 1e-3, 1000, 0.98; % 参数组合1 2000, 1e-4, 500, 0.95; % 参数组合2 1000, 1e-5, 2000, 0.99 % 参数组合3 ];
SA算法 参数组合1 - 最优路径长度:15385.43,运行时间:0.75秒 参数组合2 - 最优路径长度:15495.89,运行时间:0.19秒 参数组合3 - 最优路径长度:15385.43,运行时间:3.58秒
SA算法三种组合参数下的运行结果:
GA算法:
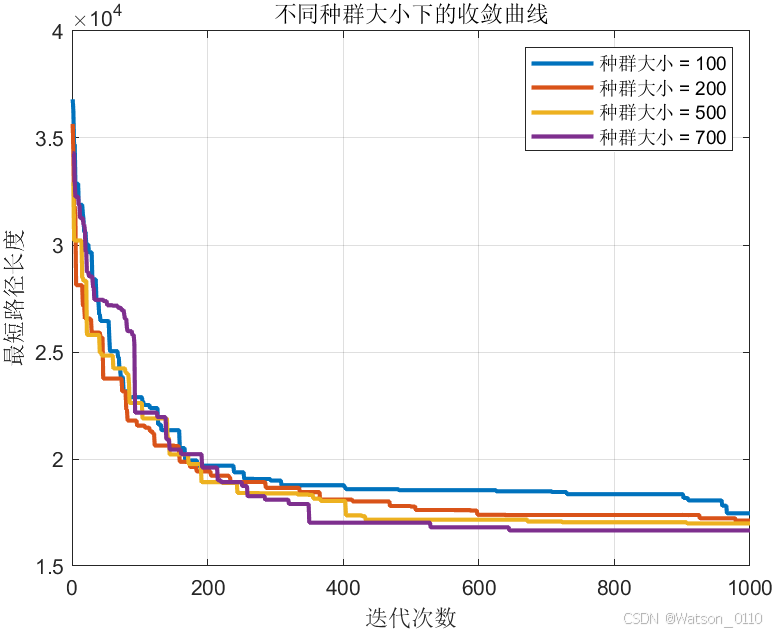
种群大小 = 100 时的运行时间: 0.4080 秒 种群大小 = 200 时的运行时间: 0.8079 秒 种群大小 = 500 时的运行时间: 2.8292 秒 种群大小 = 700 时的运行时间: 4.8889 秒
不同种群大小下的最终最短路径:
种群大小 最短路径长度 _______ __________ 100 17463 200 17119 500 16988 700 16662
GA早收敛问题:
GA初始种群降维可视化展示
红色的是SA运行一次初始解降维后的位置,蓝色是GA的初始种群分布!
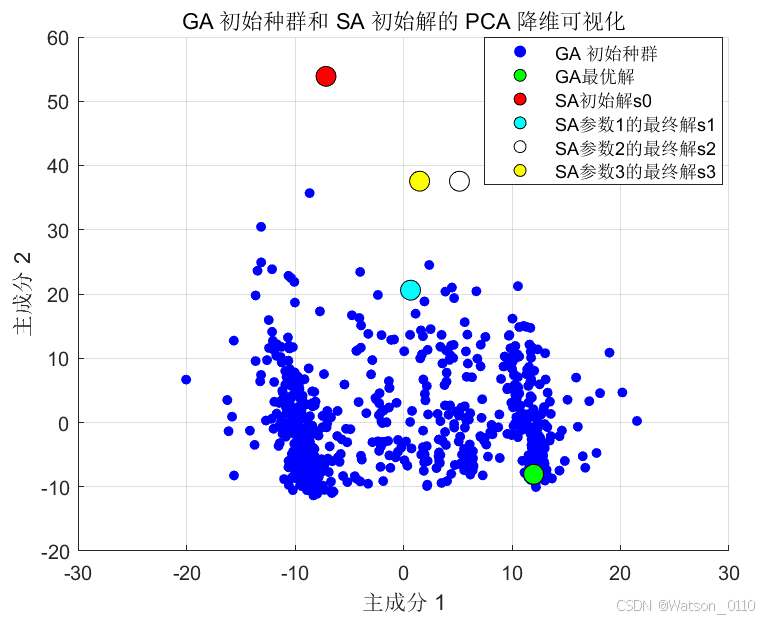
不过值得注意的是,上图反映的仅仅只是生成种群个体的的差异,分布在相邻位置甚至相同位置的个体,并不一定是相同的个体,但是能反映这些个体应该有很强的相关性。同样,哪怕是完全相同的路径,也可能因为出发的城市不同而分布在不同的位置。我们发现这样的个体在二维上分布也有一定距离。
所以,影响GA算法也许和生成的初始种群有很大关系,种群分布太密集可能会降低搜索的效率,造成很多重复个体。浪费搜索空间。
为了进一步探究初始种群对算法的影响,我希望对GA算法引入一个种群个体间的一个距离度量。由于每一个可行解个体,即使是不同的排列方式,也可以得到相同的路径解,因为TSP的解是一个无向环。那么如何去衡量不同解的差异性呢?这里考虑引入一个环形距离的度量:circular_path_distance
function distance = circular_path_distance(path1, path2)
% 输入为两个种群个体的路径 path1 和 path2,路径长度为31
% 计算环形路径的距离度量
n = length(path1); % 假设路径长度为31
% 初始化距离为一个大的值
min_distance = inf;
% 遍历所有可能的偏移量(相当于将 path2 旋转来找到最佳匹配)
for shift = 0:n-1
% 将 path2 循环移位 shift 个位置
rotated_path2 = circshift(path2, shift);
% 计算当前移位情况下,path1 和 rotated_path2 的相邻距离之和
distance_sum = 0;
for i = 1:n
% 计算每对相邻城市之间的差异
distance_sum = distance_sum + abs(path1(i) - rotated_path2(i));
end
% 更新最小距离
min_distance = min(min_distance, distance_sum);
end
% 返回最小的环形路径距离
distance = min_distance;
end
该算法可以对于GA生成初始种群使进行挑选,确保生成的初始种群能够尽可能分散,通过设置min_distance这个变量作为阈值,判断随机生成的个体是否能够作为初始种群个体之一。这里设置50,得到的如下结果。
但是很遗憾的是,重复多次运行的结果并没有非常明显的提高,还是没有办法找到最优解。也许GA本身的并行特性也决定了它在处理这个TSP问题上,不如SA单个串行求解表现出色。但在求解其他更大规模的计算,遗传算法仍然是非常好的选择,设计初始种群生成策略和适应度函数的计算就非常关键了。在这个问题上我并没有找到一种非常好的设计方式。
SA与GA的算法分析比较
-
算法的原理差异:首先,明确说明模拟退火(SA)和遗传算法(GA)的搜索策略和优化原理的不同。模拟退火利用逐渐降温的概率接受准则,以确保算法能够跳出局部最优解,朝全局最优解搜索。遗传算法则依赖于种群多样性和遗传操作,但它的进化取决于初始种群的质量。理论上,这种依赖可能导致在初始种群质量不佳时,GA更容易停留在局部最优。
-
SA的收敛性和全局最优性质:模拟退火的降温过程逐步减少“能量”或“温度”,这与物理中的退火过程类似。根据概率论理论,只要降温足够缓慢,SA能找到全局最优解。引用理论如“大数定理”或马尔可夫链来说明这种收敛性。 GA的多样性瓶颈:遗传算法的理论研究表明,初始种群的多样性对最终解的质量有重要影响。可以引用有关“遗传漂变”(genetic drift)和“收敛加速”的理论来说明,种群过早收敛时,可能导致搜索空间的覆盖不足,进而失去对一些优良解的搜索能力。
-
实验结果的解释:结合实验数据,可以指出,GA中不同种群规模下的收敛效果与初始种群选择密切相关,而SA由于随机搜索方向的灵活性,其结果波动更小,更具稳定性。理论上,这种一致性支持了SA在TSP问题中更好的求解性能。
结论:
-
“基于模拟退火逐步降温的接受准则理论支持,SA在TSP中有效跳出局部最优解。”
-
“GA的进化依赖于多样性保留和适应度选择,理论上更可能因初始种群质量导致收敛到次优解。”
代码:
% 模拟退火算法求解TSP问题,支持多组参数对比
clear;
clc;
% 初始化城市坐标
cities = [
1304 2312; 3639 1315; 4177 2244; 3712 1399; 3488 1535; 3326 1556;
3238 1229; 4196 1004; 4312 790; 4386 570; 3007 1970; 2562 1756;
2788 1491; 2381 1676; 1332 695; 3715 1678; 3918 2179; 4061 2370;
3780 2212; 3676 2578; 4029 2838; 4263 2931; 3429 1908; 3507 2367;
3394 2643; 3439 3201; 2935 3240; 3140 3550; 2545 2357; 2778 2826;
2370 2975
];
% 计算城市间距离矩阵
n = size(cities, 1);
D = zeros(n);
for i = 1:n
for j = 1:n
D(i,j) = sqrt((cities(i,1)-cities(j,1))^2 + (cities(i,2)-cities(j,2))^2);
end
end
% 定义可调参数的组合
param_combinations = [
3000, 1e-3, 1000, 0.98; % 参数组合1
2000, 1e-4, 500, 0.95; % 参数组合2
1000, 1e-5, 2000, 0.99 % 参数组合3
];
num_combinations = size(param_combinations, 1); % 参数组合数量
results = zeros(num_combinations, 1); % 存储每组参数的最优路径长度
run_times = zeros(num_combinations, 1); % 存储每组参数的运行时间
paths = cell(num_combinations, 1); % 存储每组参数的路径
temp_histories = cell(num_combinations, 1); % 记录温度变化
length_histories = cell(num_combinations, 1); % 记录路径长度变化
s = randperm(n); % 随机排列1到n
for k = 1:num_combinations % 遍历每组参数组合
params = struct('T0', param_combinations(k, 1), ...
'Tend', param_combinations(k, 2), ...
'L', param_combinations(k, 3), ...
'q', param_combinations(k, 4)); % 参数结构体
% 初始化参数
T = params.T0; % 当前温度
count = 0; % 迭代计数器
% 产生一个初始解
% s = randperm(n); % 随机排列1到n
s1 = s; % 当前解
s2 = s1; % 新解
% 记录最优解
bestS = s1;
bestL = pathLength(D, s1);
curL = bestL;
% 用于记录温度和路径长度的变化
temp_history = []; % 记录温度
length_history = []; % 记录对应的路径长度
% 开始计时
tic;
% 开始模拟退火迭代
while T > params.Tend
for j = 1:params.L
count = count + 1;
% 产生新解
p1 = ceil(n * rand);
p2 = ceil(n * rand);
if p1 > p2
tmp = p1;
p1 = p2;
p2 = tmp;
end
s2 = s1;
s2(p1:p2) = s1(p2:-1:p1);
% 计算新解的路径长度
newL = pathLength(D, s2);
% Metropolis准则判断是否接受新解
df = newL - curL;
if df < 0 % 更好的解,接受
s1 = s2;
curL = newL;
if newL < bestL % 更新最优解
bestS = s2;
bestL = newL;
end
elseif rand < exp(-df/T) % 按概率接受差解
s1 = s2;
curL = newL;
end
end
% 记录当前温度和对应的最优路径长度
temp_history = [temp_history T];
length_history = [length_history bestL];
% 降温
T = params.q * T;
end
% 记录运行时间
run_times(k) = toc; % 结束计时并记录时间
% 存储结果
results(k) = bestL; % 记录最优路径长度
paths{k} = bestS; % 记录最优路径
temp_histories{k} = temp_history; % 记录温度变化
length_histories{k} = length_history; % 记录路径长度变化
% 输出每组参数的结果
fprintf('参数组合%d - 最优路径长度:%.2f,运行时间:%.2f秒\n', k, bestL, run_times(k));
end
% 可视化结果
figure('Position', [100, 100, 1600, 500]); % 设置图形窗口大小
% 子图1:路径可视化
for k = 1:num_combinations
subplot(2, num_combinations, k);
plot(cities(:,1), cities(:,2), 'r*');
hold on;
bestS = paths{k};
for i = 1:n-1
plot([cities(bestS(i),1), cities(bestS(i+1),1)], ...
[cities(bestS(i),2), cities(bestS(i+1),2)], 'b-');
end
% 连接最后一个城市和第一个城市
plot([cities(bestS(n),1), cities(bestS(1),1)], ...
[cities(bestS(n),2), cities(bestS(1),2)], 'b-');
title(sprintf('参数组合 %d - TSP最优路径:%d', k,results(k)));
xlabel('X坐标');
ylabel('Y坐标');
grid on;
end
% 子图2:路径长度随温度的变化
for k = 1:num_combinations
subplot(2, num_combinations, num_combinations + k);
semilogx(temp_histories{k}, length_histories{k}, 'LineWidth', 1.5);
title(sprintf('参数组合 %d - 路径长度随温度变化', k));
xlabel('温度(对数刻度)');
ylabel('路径长度');
grid on;
end% 函数定义部分
% 初始化城市坐标
C = [1304 2312; 3639 1315; 4177 2244; 3712 1399; 3488 1535; 3326 1556; ...
3238 1229; 4196 1044; 4312 790; 4386 570; 3007 1970; 2562 1756 ; ...
2788 1491; 2381 1676; 1332 695; 3715 1678; 3918 2179; 4061 2370 ; ...
3780 2212; 3676 2578; 4029 2838; 4263 2931; 3429 1908; 3507 2376 ; ...
3394 2643; 3439 3201; 2935 3240; 3140 3550; 2545 2357; 2778 2826 ; ...
2370 2975];
N = size(C, 1);
D = zeros(N);
% 求任意两个城市距离间隔矩阵
for i = 1:N
for j = 1:N
D(i, j) = ((C(i, 1) - C(j, 1))^2 + (C(i, 2) - C(j, 2))^2)^0.5;
end
end
% popSizes = [100, 200, 500, 700]; % 不同的种群规模
G = 1000; % 最大遗传代数
% 初始化保存结果的变量
minDistances = zeros(length(popSizes), G);
finalMinDistances = zeros(length(popSizes), 1);
% % 遍历不同的种群规模
% NP = popSizes(pIdx);
% f = zeros(NP, N);
F = [];
% 参数设置
NP = 700; % 种群大小
% 生成初始种群
f=generate_initial_population(NP,N,60);
R = f(1:N);
len = zeros(NP, 1);
fitness = zeros(NP, 1);
gen = 0;
Rlength = zeros(G, 1);
% 开始计时
tic;
% 遗传算法循环
while gen < G
for i = 1:NP
len(i, 1) = D(f(i, N), f(i, 1));
for j = 1:N-1
len(i, 1) = len(i, 1) + D(f(i, j), f(i, j+1));
end
end
maxlen = max(len);
minlen = min(len);
rr = find(len == minlen);
R = f(rr(1, :), :);
for i = 1:NP
fitness(i, 1) = 1 - ((len(i, 1) - minlen) / (maxlen - minlen + 0.001));
end
nn = 0;
for i = 1:NP
if fitness(i, 1) >= rand
nn = nn + 1;
F(nn, :) = f(i, :);
end
end
[aa, bb] = size(F);
while aa < NP
nnper = randperm(nn);
A = F(nnper(1), :);
B = F(nnper(2), :);
W = ceil(N / 10);
p = unidrnd(N - W + 1);
for i = 1:W
x = find(A == B(p + i - 1));
y = find(B == A(p + i - 1));
temp = A(p + i - 1);
A(p + i - 1) = B(p + i - 1);
B(p + i - 1) = temp;
temp = A(x);
A(x) = B(y);
B(y) = temp;
end
p1 = floor(1 + N * rand());
p2 = floor(1 + N * rand());
while p1 == p2
p1 = floor(1 + N * rand());
p2 = floor(1 + N * rand());
end
tmp = A(p1);
A(p1) = A(p2);
A(p2) = tmp;
tmp = B(p1);
B(p1) = B(p2);
B(p2) = tmp;
F = [F; A; B];
[aa, bb] = size(F);
end
if aa > NP
F = F(1:NP, :);
end
f = F;
f(1, :) = R;
clear F;
gen = gen + 1;
Rlength(gen) = minlen;
end
% 结束计时并记录时间
elapsedTime = toc;
fprintf('种群大小 = %d 时的运行时间: %.4f 秒\n', NP, elapsedTime);
% 输出每种群规模下的最终最短路径
disp(['不同种群大小下的最终最短路径:',num2str(min(Rlength))]);
% 最优路线图
figure;
for i = 1:N-1
plot([C(R(i), 1), C(R(i+1), 1)], [C(R(i), 2), C(R(i+1), 2)], 'bo-');
hold on;
end
plot([C(R(N), 1), C(R(1), 1)], [C(R(N), 2), C(R(1), 2)], 'ro-');
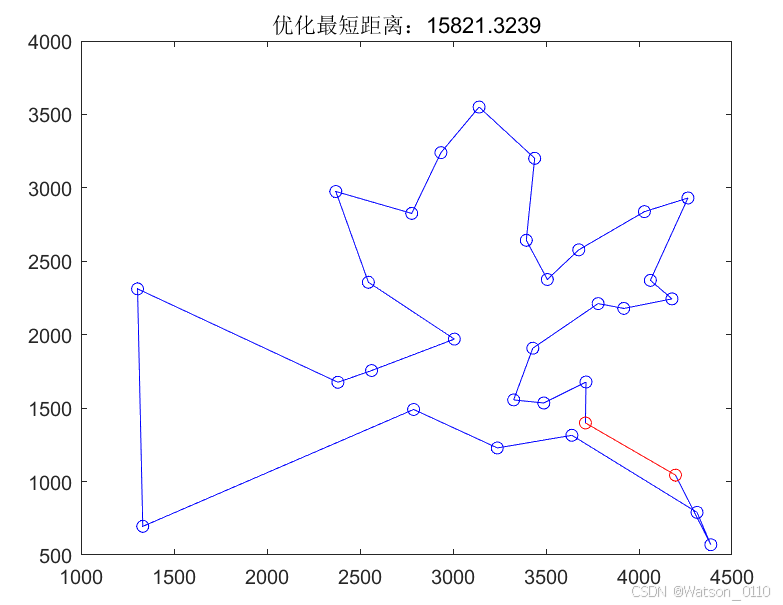
title(['优化最短距离:', num2str(min(Rlength))]);
hold off;降维种群分布可视化
%PCA降维种群分布可视化
% 假设 F 是 700×31 的初始种群,s1 是 1×31 的 SA 算法初始解
% 将 s1 添加到 F 的最后一行
F_augmented = [f;R;s;paths{1};paths{2};paths{3}];
% 使用 PCA 将 F_augmented 降维到 2 维
[coeff, score, ~] = pca(F_augmented); % 使用 PCA 降维
reducedF_PCA = score(:, 1:2); % 取前两主成分进行可视化
% 可视化 PCA 降维结果
figure;
scatter(reducedF_PCA(1:end-1, 1), reducedF_PCA(1:end-1, 2), 25, 'filled', 'MarkerFaceColor', 'b');
hold on;
% 标出 GA 在降维空间中的位置
scatter(reducedF_PCA(end-4, 1), reducedF_PCA(end-4, 2), 100, 'g', 'filled', 'MarkerEdgeColor', 'k');
% 标出 s 在降维空间中的位置
scatter(reducedF_PCA(end-3, 1), reducedF_PCA(end-3, 2), 100, 'r', 'filled', 'MarkerEdgeColor', 'k');
% 标出 SA最终解在降维空间中的位置
scatter(reducedF_PCA(end-2, 1), reducedF_PCA(end-2, 2), 100, 'c', 'filled', 'MarkerEdgeColor', 'k');
scatter(reducedF_PCA(end-1, 1), reducedF_PCA(end-1, 2), 100, 'w', 'filled', 'MarkerEdgeColor', 'k');
scatter(reducedF_PCA(end, 1), reducedF_PCA(end, 2), 100, 'y', 'filled', 'MarkerEdgeColor', 'k');
title('GA 初始种群和 SA 初始解的 PCA 降维可视化');
xlabel('主成分 1');
ylabel('主成分 2');
legend('GA 初始种群', 'SA 初始解 s','SA参数1的最终解s1','SA参数1的最终解s2','SA参数1的最终解s2','SA参数1的最终解s2' ,'Location', 'best');
grid on;
hold off;计算城市距离函数||环路距离||生成初始种群函数
function len = pathLength(D, s)
n = length(s);
len = D(s(n), s(1)); % 回到起点的距离
for i = 1:n-1
len = len + D(s(i), s(i+1));
end
end
function distance = circular_path_distance(path1, path2)
% 输入为两个种群个体的路径 path1 和 path2,路径长度为31
% 计算环形路径的距离度量
n = length(path1); % 假设路径长度为31
% 初始化距离为一个大的值
min_distance = inf;
% 遍历所有可能的偏移量(相当于将 path2 旋转来找到最佳匹配)
for shift = 0:n-1
% 将 path2 循环移位 shift 个位置
rotated_path2 = circshift(path2, shift);
% 计算当前移位情况下,path1 和 rotated_path2 的相邻距离之和
distance_sum = 0;
for i = 1:n
% 计算每对相邻城市之间的差异
distance_sum = distance_sum + abs(path1(i) - rotated_path2(i));
end
% 更新最小距离
min_distance = min(min_distance, distance_sum);
end
% 返回最小的环形路径距离
distance = min_distance;
end
function population = generate_initial_population(popSize, numCities, minDistance)
% popSize 是种群规模
% numCities 是城市数量(如31)
% minDistance 是每个新个体与已有个体之间的最小距离要求
population = zeros(popSize, numCities); % 初始化种群
population(1, :) = randperm(numCities); % 随机生成第一个个体
for i = 2:popSize
while true
% 随机生成一个新的路径(个体)
candidate = randperm(numCities);
% 计算该候选个体与已有种群中所有个体的距离
valid = true;
for j = 1:i-1
dist = circular_path_distance(candidate, population(j, :));
if dist < minDistance
valid = false;
break; % 如果距离不满足要求,则重新生成该候选个体
end
end
% 如果满足距离要求,则将该个体添加到种群中
if valid
population(i, :) = candidate;
break;
end
end
end
end
















 1554
1554

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









