







- 【无限嚣张(菜菜)】:hello您好,我是菜菜,很高兴您能来访我的博客,我是一名爱好编程学习研究的菜菜,每天分享自己的学习,想法,博客来源与自己的学习项目以及编程中遇到问题的总结。
- 座右铭:尽人事,听天命
- 个人主页:无限嚣张(菜菜)
目录
摘 要:
研究二阶多智能体系统在固定有向拓扑下的领导跟随一致性问题. 为了节省网络和计算资源, 给出一种基于事件触发控制的一致性算法. 针对每个跟随者智能体, 设计基于状态误差形式的触发函数, 只有当状态误差满足一定条件, 即触发函数取值为零时智能体才触发事件, 同时更新并传递自身的采样信息, 在两个相邻事件触发时刻之间,控制输入只受领导者控制信号的影响. 利用模型变换、矩阵理论和Lyapunov稳定性理论给出多智能体系统达到领导跟随一致性的充分条件. 仿真结果验证了理论方案的可行性和有效性.
引理1
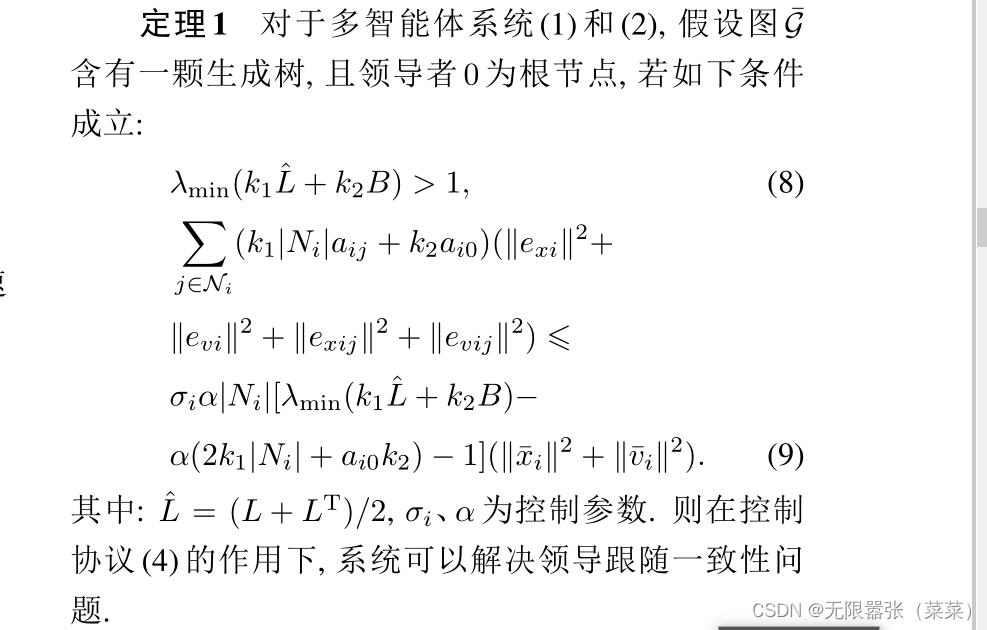
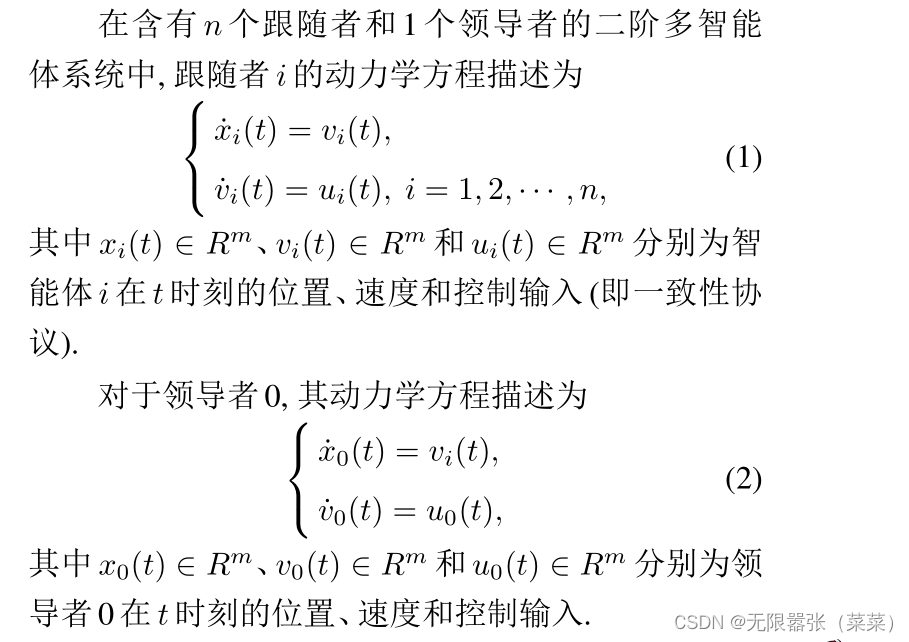
二阶多智能体系统的领导跟随一致性
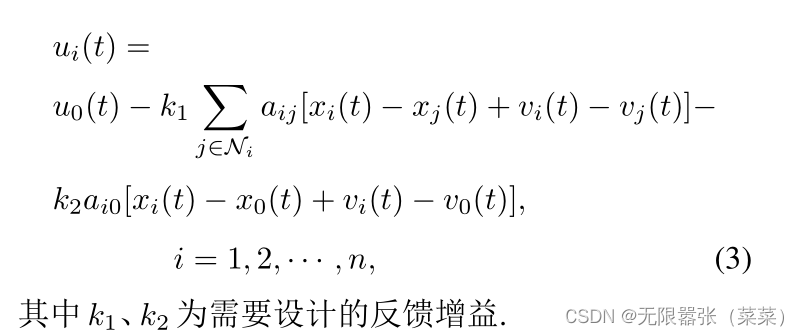
一致性控制协议
事件触发控制协议
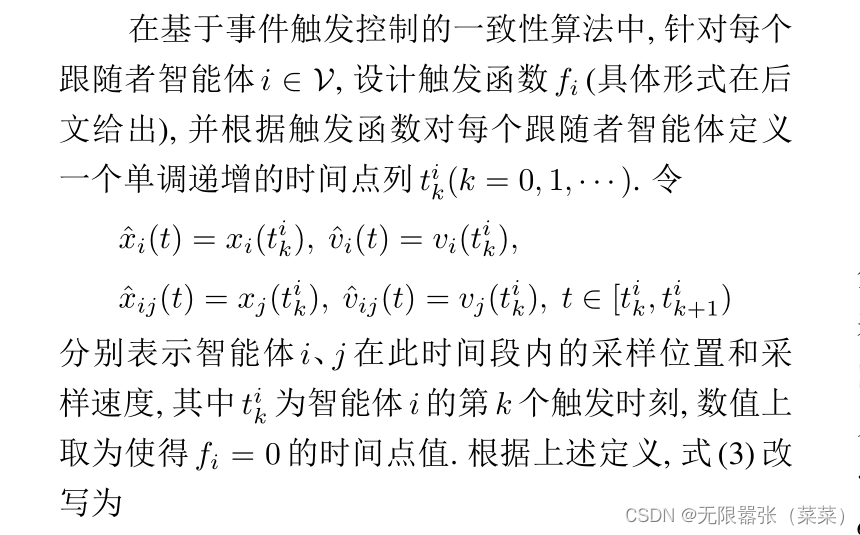
事件触发控制器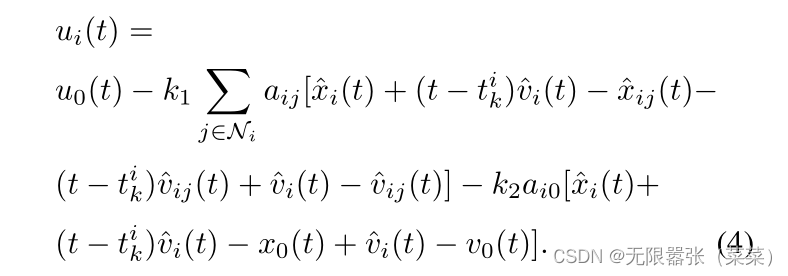
触发函数定义 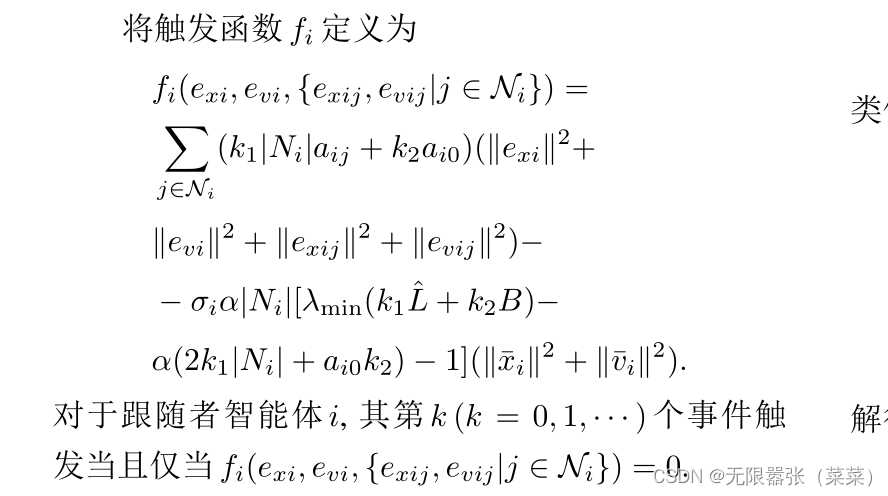
仿真试验
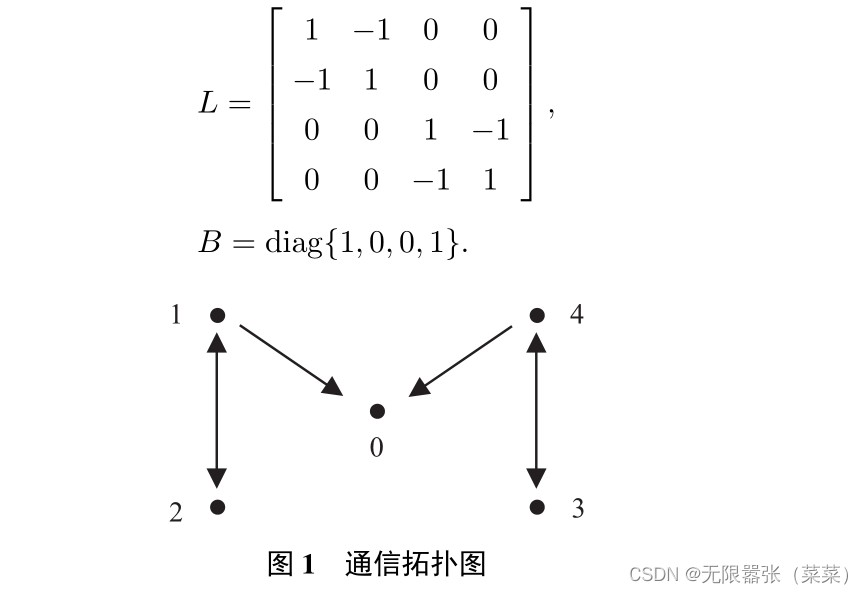
利用Matlab仿真实验验证理论方案的有效性和正确性. 考虑由4个跟随者和1个领导者组成的多智能体系统, 其通信拓扑结构如图1所示. 为了便于实验操作, 仅考虑 𝑚 = 1 的情况. 容易得到图 𝒢 的拉普拉斯矩阵和领导跟随邻接矩阵分别为
根据引理1可知 选取 K1 = 5 , K2 = 9 , 求得:

图 2 多智能体系统的领导跟随位置轨迹
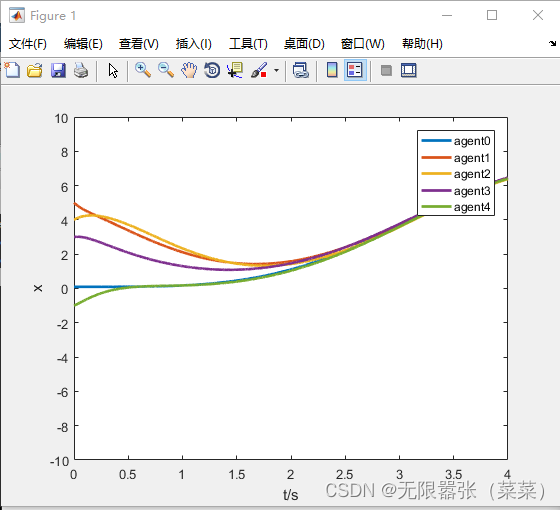
图 3 多智能体系统的领导跟随速度轨迹
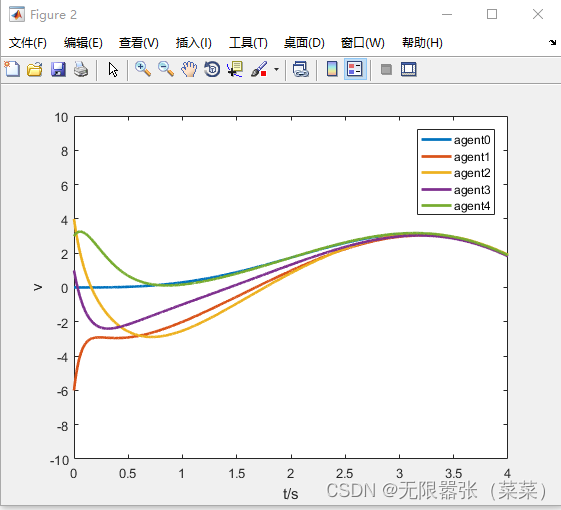
图 4 多智能体系统的领导跟随位置差变化趋势
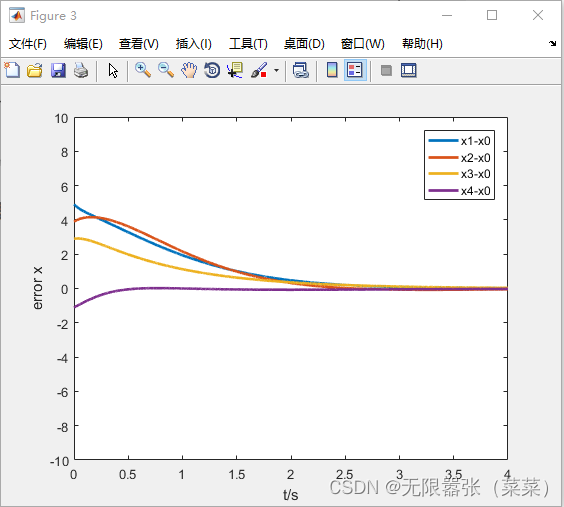
图 5 多智能体系统的领导跟随速度差变化趋势
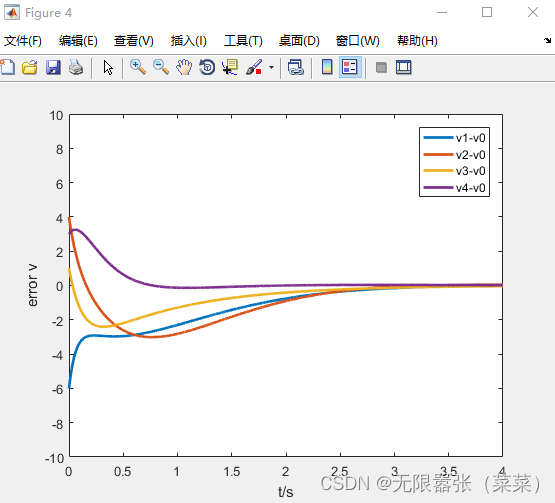
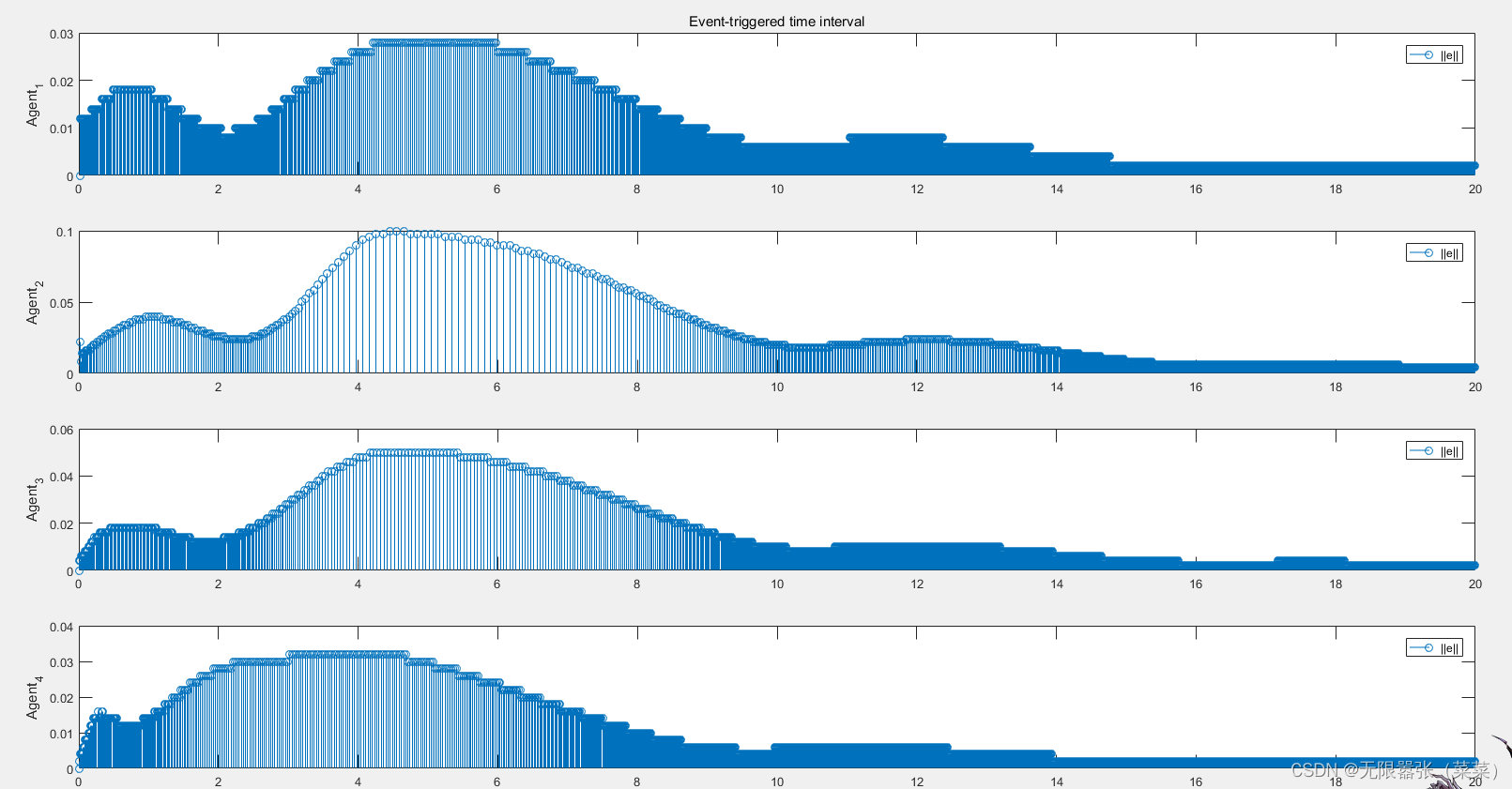
图6 事件触发控制图
参考文献:
黄红伟, 黄天民, 吴胜,等. 基于事件触发的二阶多智能体领导跟随一致性[J]. 控制与决策, 2016, 31(5):7.



















 1698
1698

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











